1.本发明涉及一种小尺寸驱动内置的三自由度假手指,属于残疾人用假手指技术领域。
背景技术:
2.假手或假手指作为一种生机电一体化的机器人类型,主要应用于手或手指残缺的残疾人患者,以帮助这一特定群体通过安装机器人手指重新获得健康人所能具备的手指操作能力。
3.早期的假手主要出于残疾人的心理角度,更多的考虑到装饰性和美观性,随着生机电一体化技术的发展,假手的设计逐渐过渡到以功能性和装饰性兼顾的阶段,近些年来,假手的功能性研究逐渐成为生机电领域的热点。
4.机器人手指驱动源主要有电机驱动、腱绳驱动和气动液压驱动,其中气动液压驱动源需要外置,且容易导致液体泄露造成污染,腱绳驱动方案虽然使假手指可以达到与人手相仿的体积,但同样需要驱动源外置,电机驱动可置于假手指内部,可以做到与人手相仿的体积,且响应相比于液动气动更加迅速,非线性问题也较少,因此,电机驱动更广泛地应用在假手指上。电机驱动又分为直流电机和无刷电机驱动,前者由于存在转矩波动,换向火花问题,寿命相比于无刷电机更短,且性能不佳,所以一般高精度稳定驱动源使用无刷直流电机。假手考虑到需要安装到残疾人手臂上,体积小和美观性以及功能性是一对同时需要却又相互限制的指标,人单根手指一般为4个自由度,在现有的技术中,假手指多为一个自由度,其它自由度通过机械传动与主动自由度耦合运动。然而单个自由度的假手指只可以做到简单的抓握运动,无法表达残疾人患者更准确的操作意图,而多个自由度的设计又会使假手指体积增大,导致无法安装在患者手上。假手指体积的另一个制约因素是传动机构,要使假手指可以输出足够大的力就需要更大的传动比,这也与体积制约相悖。
技术实现要素:
5.本发明目的是为了解决现有假手指无法兼顾体积小和多自由度的问题,提供了一种小尺寸驱动内置的三自由度假手指。
6.本发明提出的一种小尺寸驱动内置的三自由度假手指,它包括假手指本体;
7.所述假手指本体包括近指节、中指节和远指节;
8.近指节腔体内设置有无刷直流电机和减速器,绝对位置磁编码器设置在近指节后部腔体内;
9.无刷直流电机的输出轴连接减速器的输入端,减速器的输出轴作为近指节的输出轴,无刷直流电机的尾部固联有径向磁钢,径向磁钢作用于绝对位置磁编码器;
10.中指节和近指节结构相同,减速器的输出轴连接在相邻指节之间;
11.远指节和中指节通过键绳耦合传动;
12.远指节的指肚处设置有压力传感器;
13.绝对位置磁编码器用于获取无刷直流电机转子的绝对角位置和角速度,并将获取的绝对角位置和角速度发送至驱动控制板;
14.压力传感器用于获取指肚和指尖处的压力值,压力传感器输出模拟压力信号,驱动控制板采样模拟压力信号后进行处理获得压力值;
15.近指节和中指节实现两个主动弯曲方向自由度,远指节通过与中指节耦合传动实现弯曲自由度。
16.优选的,近指节和中指节之间通过第一轮盘和螺钉连接;
17.中指节和远指节之间通过转轴和径向轴承配合连接,且通过插销限制远指节左右方向的自由度。
18.优选的,所述中指节和远指节连接处的外侧安装有第二轮盘,键绳以“8”字型缠绕在第一轮盘和第二轮盘上,第二轮盘随第一轮盘转动,且第二轮盘和第一轮盘的转动方向和转动角度均相同;
19.所述中指节和远指节之间的关节转角关系为1:1。
20.优选的,所述减速器采用蜗轮蜗杆减速器,传动比为1:236;
21.所述无刷直流电机采用emax1104的六对极直流无刷外转子电机,额定扭矩为1.5mn
·
m;
22.所述绝对位置磁编码器采用as5048a;
23.所述压力传感器采用力敏电阻,输出0-3v的模拟电压。
24.优选的,所述器驱动控制板与绝对位置磁编码通过串行外设接口spi进行通讯,驱动控制板采用32位有符号整数记录绝对位置磁编码器的多圈转动数值。
25.优选的,所述绝对位置磁编码器为圆形,尾部通过螺栓固定在近指节后部腔体内。
26.优选的,所述无刷直流电机的驱动控制算法包括位置环、速度环和电流环,位置环、速度环和电流环均通过比例-积分-微分控制器pid进行控制;
27.位置环、速度环和电流环的控制频率分别为:32khz、4khz和2khz。
28.优选的,所述电流环通过比例积分控制器pi和磁场定向控制算法控制无刷直流电机的电流q轴分量iq和电流d轴分量id。
29.优选的,所述磁场定向控制算法的具体方法为:
30.s1、无刷直流电机的驱动电路采用三相半桥驱动电路,相电流采样电阻串联在半桥的低端mos和驱动地之间;
31.在b相和c相下桥臂导通时,触发adc采样,采集相电流采样电阻的电压,获得b相电流ib和c相电流ic,再计算获得a相电流ia:
32.ia=-(ib ic);
33.s2、通过clarke变换和park变换将a相电流、b相电流ib和c相电流转换到电机转子iq-id坐标系中:
34.35.其中:iq表示电流q轴分量,id表示电流d轴分量,θ表示电机转子电角度,表示转换中间变量:
[0036][0037]
s3、电流环根据电流q轴分量iq和电流d轴分量id获得误差值;
[0038]
s4、采用svpwm算法,将三相mos的八种导通状态划分为六个扇区,依据伏秒定律矢量合成目标电压矢量。
[0039]
优选的,所述假手指本体的总长度为101.88mm,总宽度为17.3mm,厚度为15.9mm;
[0040]
所述近指节的长度为42.34mm,中指节的长度为37.04mm,远指节的长度为22.5mm。
[0041]
本发明的优点:
[0042]
本发明提出了一种能够兼顾假手指体积、形态和自由度的三自由度驱动内置手指指节的假手指,近指节和中指节实现两个主动弯曲方向自由度,远指节通过与中指节耦合传动实现无驱动的弯曲自由度。
[0043]
假手指末端可输出2n
·
m的力矩(以基关节为力臂起始,假手指完全伸展状态下),单个自由度转速可达1r/s。假手指每个关节的运动范围能够达到-10
°
到90
°
,其中手指各指节与手背所在平面重合的状态为各关节的零度角。在兼顾假手指体积的同时,保证了运动的灵活性和实用性。
[0044]
驱动源采用无刷直流电机,使用foc(field-oriented control,磁场定向控制)算法代替传统的六步换相驱动算法驱动无刷电机,提出了适用于假手指协同的轨迹跟踪算法。
附图说明
[0045]
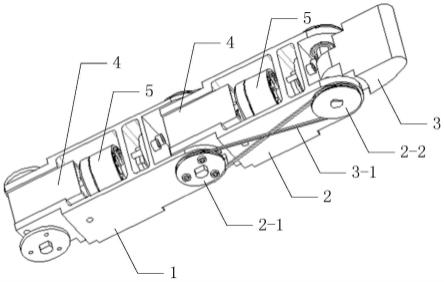
图1是本发明所述三自由度假手指的结构示意图;
[0046]
图2是本发明所述无刷直流电机驱动控制算法的原理框图;
[0047]
图3是无刷直流电机的驱动电路的原理图;
[0048]
图4是绝对位置磁编码器的测量原理图;
[0049]
图5是绝对位置磁编码器的结构示意图;
[0050]
图6是绝对位置磁编码器的电路原理图;
[0051]
图7是无刷直流电机驱动电路中的驱动地和低压地通过磁珠隔离示意图;
[0052]
图8是无刷直流电机预驱电路原理图;
[0053]
图9是假手指末端的工作空间示意图;
[0054]
图10是三相驱动pwm使用中心对齐模式示意图;
[0055]
图11是假手指本体d-h模型示意图;
[0056]
图12是键绳传动受力分析示意图。
具体实施方式
[0057]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0058]
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
[0059]
下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
[0060]
实施例1:
[0061]
下面结合图1、图4、图5和图6说明本实施方式,本实施方式所述一种小尺寸驱动内置的三自由度假手指,它包括假手指本体;
[0062]
所述假手指本体包括近指节1、中指节2和远指节3;
[0063]
近指节1腔体内设置有无刷直流电机5和减速器4,绝对位置磁编码器设置在近指节1后部腔体内;
[0064]
无刷直流电机5的输出轴连接减速器4的输入端,减速器4的输出轴作为近指节1的输出轴,无刷直流电机5的尾部固联有径向磁钢,径向磁钢作用于绝对位置磁编码器;
[0065]
中指节2和近指节1结构相同,减速器4的输出轴连接在相邻指节之间;
[0066]
远指节3和中指节2通过键绳3-1耦合传动;
[0067]
远指节3的指肚处设置有压力传感器;
[0068]
绝对位置磁编码器用于获取无刷直流电机5转子的绝对角位置和角速度,并将获取的绝对角位置和角速度发送至驱动控制板;
[0069]
压力传感器用于获取指肚和指尖处的压力值,并将获取的压力值发送至驱动控制板;
[0070]
近指节1和中指节2实现两个主动弯曲方向自由度,远指节3通过与中指节2耦合传动实现弯曲自由度。
[0071]
本实施方式中,无刷直流电机5的尾部固联有径向磁钢,径向磁钢作用于绝对位置磁编码器,用于测量无刷直流电机5转子的绝对角位置和角速度。
[0072]
进一步的,近指节1和中指节2之间通过第一轮盘2-1和螺钉连接;
[0073]
中指节2和远指节3之间通过转轴和径向轴承配合连接,且通过插销限制远指节3左右方向的自由度。
[0074]
再进一步的,所述中指节2和远指节3连接处的外侧安装有第二轮盘2-2,键绳3-1以“8”字型缠绕在第一轮盘2-1和第二轮盘2-2上,第二轮盘2-2随第一轮盘2-1转动,且第二轮盘2-2和第一轮盘2-1的转动方向和转动角度均相同;
[0075]
所述中指节2和远指节3之间的关节转角关系为1:1。
[0076]
再进一步的,所述减速器4采用蜗轮蜗杆减速器4,传动比为1:236;
[0077]
所述无刷直流电机5采用emax1104的六对极直流无刷外转子电机,额定扭矩为1.5mn
·
m;
[0078]
所述绝对位置磁编码器采用as5048a;
[0079]
所述压力传感器采用力敏电阻,输出0-3v的模拟电压。
[0080]
本实施方式中,所述减速器4采用减速器4能够兼顾体积和传动比,具有自锁的特性。
[0081]
本实施方式中,所述无刷直流电机5采用emax1104的六对极直流无刷外转子电机,额定扭矩1.5mn
·
m,符合指尖输出力要求,同时kv值高达5250,在电机驱动系统供电电压8v的情况下满足转速要求。由于蜗轮蜗杆传动的自锁特性,只需在电机末端安置位置速度传感器即可在重复启动关闭假手指的使用工况下保证假手指正常的位置跟踪功能,另一方面也可靠蜗轮蜗杆的自锁减少电机的输出带来的功耗。
[0082]
本实施方式中,绝对位置磁编码器采用as5048a作为位置传感器,精度最高为0.05
°
,集成了i2c和spi接口,可直接对外输出测量的绝对位置,测量原理如图4所示,由于蜗轮蜗杆减速器的使用,机械上的自锁可避免从外部转动关节,故节省了额外的关节处绝对位置传感器的使用,只需在关闭系统时将当前关节绝对角位置存储在pcb上的flash芯片上,系统再次启动时从flash上加载关节角度即可。
[0083]
本实施方式中,压力传感器采用力敏电阻,输出0到3.3v的模拟电压,电气连接到驱动控制板上的ad采样io,电压值与电阻所受正压力顶过标定校准后成线性关系,因此,可以直接得到手指指肚和指尖处的受力。
[0084]
再进一步的,所述器驱动控制板与绝对位置磁编码通过串行外设接口spi进行通讯,驱动控制板采用32位有符号整数记录绝对位置磁编码器的多圈转动数值。
[0085]
本实施方式中,对于每一次上电启动,为了记录电机转子转过的多圈角度,使用一个32位有符号整数记录磁编码器多圈的转动数值,每一次传感器采样时获得14位的磁编码器角度数据并将其扩展位16位数据,随后该变量低16位记录一圈内的位置,高16位记录转子转过的圈数。
[0086]
再进一步的,所述绝对位置磁编码器为圆形,尾部通过螺栓固定在近指节1后部腔体内。
[0087]
本实施方式中,绝对位置磁编码器设置为圆形,如图5所示,能够适应假手指本体内部的尺寸,spi通讯接口通过焊盘与外部电气连接,电路原理图如图6所示。
[0088]
实施例2:
[0089]
下面结合图1、图2和图3说明本实施方式,本实施方式所述另一种小尺寸驱动内置的三自由度假手指,它包括假手指本体;
[0090]
所述假手指本体包括近指节1、中指节2和远指节3;
[0091]
近指节1腔体内设置有无刷直流电机5和减速器4,绝对位置磁编码器设置在近指节1后部腔体内;
[0092]
无刷直流电机5的输出轴连接减速器4的输入端,减速器4的输出轴作为近指节1的输出轴,无刷直流电机5的尾部固联有径向磁钢,径向磁钢作用于绝对位置磁编码器;
[0093]
中指节2和近指节1结构相同,减速器4的输出轴连接在相邻指节之间;
[0094]
远指节3和中指节2通过键绳3-1耦合传动;
[0095]
远指节3的指肚处设置有压力传感器;
[0096]
绝对位置磁编码器用于获取无刷直流电机5转子的绝对角位置和角速度,并将获取的绝对角位置和角速度发送至驱动控制板;
[0097]
压力传感器用于获取指肚和指尖处的压力值,并将获取的压力值发送至驱动控制
板;
[0098]
近指节1和中指节2实现两个主动弯曲方向自由度,远指节3通过与中指节2耦合传动实现弯曲自由度。
[0099]
进一步的,所述无刷直流电机5的驱动控制算法包括位置环、速度环和电流环,位置环、速度环和电流环均通过比例-积分-微分控制器pid进行控制;
[0100]
位置环、速度环和电流环的控制频率分别为:32khz、4khz和2khz。
[0101]
本实施方式中,电流环即为扭矩环。位置环、速度环和电流环的控制频率分别为:32khz、4khz和2khz,同时驱动控制卡以25hz的频率向can总线广播电机实时转角和角速度。
[0102]
再进一步的,所述电流环通过比例积分控制器pi和磁场定向控制算法控制无刷直流电机5的电流q轴分量iq和电流d轴分量id。
[0103]
本实施方式中,为保证线圈产生的驱动磁场时钟垂直于转子永磁铁磁场方向以达到最大的驱动转矩,将其中的电流d轴分量id电流目标值设定为0。电流q轴分量iq电流与电机产生的驱动扭矩成正比关系,通过控制iq的大小即可控制电机转子输出的扭矩大小。
[0104]
再进一步的,所述磁场定向控制算法的具体方法为:
[0105]
s1、无刷直流电机5的驱动电路采用三相半桥驱动电路,相电流采样电阻串联在半桥的低端mos和驱动地之间;
[0106]
在b相和c相下桥臂导通时,触发adc采样,采集相电流采样电阻的电压,获得b相电流ib和c相电流ic,再计算获得a相电流ia:
[0107]
ia=-(ib ic);
[0108]
s2、通过clarke变换和park变换将a相电流、b相电流ib和c相电流转换到电机转子iq-id坐标系中:
[0109][0110]
其中:iq表示电流q轴分量,id表示电流d轴分量,θ表示电机转子电角度,表示转换中间变量:
[0111][0112]
s3、电流环根据电流q轴分量iq和电流d轴分量id获得误差值;
[0113]
s4、采用svpwm算法,将三相mos的八种导通状态划分为六个扇区,依据伏秒定律矢量合成目标电压矢量。
[0114]
本实施方式中,通过svpwm算法合成所需的电压矢量,svpwm将三相mos的8种导通状态分为6个扇区,通过伏秒定律矢量合成目标电压矢量,硬件上由设定pwm的导通时间实现。为避免mos管频繁的开关,三相驱动pwm使用中心对齐模式产生,如图10所示,每一相上升沿为高端mos导通低端mos截止,每一相下降沿则为低端导通高端截止,导通时间在一个
控制周期内呈中心对称状态,adc采样被设置为控制周期始端开始采样,此刻abc三相半桥下桥臂均导通,同时由于电机线圈为感性负载电流不能突变,故可作为电机线圈电流使用。
[0115]
本实施方式中,pid控制器参数由电机固有特性计算而得,并通过参数整定确定最终值。
[0116]
为避免mos切换过程中上下桥臂同时导通导致短路,软件和硬件上设置互补pwm的死区。系统启动阶段,为找到转子的零电角度对应的物理机械角度,需要将电机的电角度变量设为90
°
以使得电机转子转动到电角度0
°
,测得此时的磁编码器数据作为后续偏置。对于每一次装配,该偏置只需要测量一次。
[0117]
更进一步的,所述假手指本体的总长度为101.88mm,总宽度为17.3mm,厚度为15.9mm;
[0118]
更进一步的,所述近指节1的长度为42.34mm,中指节2的长度为37.04mm,远指节3的长度为22.5mm。
[0119]
所述假手指本体的总长度为101.88mm,总宽度为17.3mm,厚度为15.9mm;
[0120]
所述近指节1的长度为42.34mm,中指节2的长度为37.04mm,远指节3的长度为22.5mm。
[0121]
本实施方式中,为了保证假手指本体的运动学性能与指尖输出力指标与人手相仿,设定假手指本体各关节运动学指标及指尖输出力指标如表4-1所示:
[0122]
表1
[0123]
输出源扭矩(n
·
m)角速度(r/s)角度(
°
)输出力(n)近指节1mcp0.21.0[-10,90]-中指节2pip0.21.0[-10,90]-远指节3dip0.21.0[-10,90]-假手指本体
‑‑‑
2.0
[0124]
假手指本体的工作空间与人手手指相仿,假手指每个关节的运动范围为-10
°
到90
°
,其中手指各指节与手背所在平面重合的状态为各关节的零度角,假手指末端的工作空间如图9所示。手指末端的工作空间主要用于精确抓取,对于抓握等强力抓取手势,假手指能够包络日常生活中的大部分物体,因此,如图9所示,工作空间符合日常使用要求。
[0125]
更进一步的,所述无刷直流电机5的驱动电路包括驱动电源模块、通讯模块、主控模块、电机预驱模块和三相半桥驱动电路;
[0126]
驱动电源模块的外部额定供电电压为8v,同时为低压模块降压电路和电机驱动模块供电,低压模块使用ams1117-3.3v和ams1117-5v线性电源为mcu和can及spi模块供电,电机驱动模块直接使用外部电源。为了避免驱动电路内部mos高频切换带来的噪声污染,低压地与驱动地之间使用0r磁珠单点接地,如图7所示,同时在pcb上物理分割为两部分。
[0127]
此外,电机预驱动芯片内置的电压buck还可输出可定制的低压电源,这里将电源输出设置为5v,并将该电源作为驱动电源指示灯和错误指示灯的供电电源。电压buck的电压输出由外部硬件电路控制,输出的电压:
[0128][0129]
为将电机驱动模块供电和低压模块供电解耦,避免buck电压因预驱芯片过流保护
等原因导致切断输出影响低压电气系统的正常工作,低压模块不使用电机预驱芯片的buck电源。
[0130]
通讯模块由can接口和spi接口以及swd下载接口组成。其中can接口用于与数据手套和上层系统通讯,spi接口用于采集磁编码器电机转子角位置,swd接口用于下载程序。
[0131]
低压主控最小系统由stm32f407rgt6主控mcu和外围晶振等电路组成。该mcu内部时钟高达168mhz,适用于需要复杂浮点运算和高控制频率的算法。
[0132]
电机预驱动模块由ti的drv8301无刷电机预驱动芯片构成。其主要用于减少对mcu的pwm输出io口的需求,同时,该芯片内置电压采集运放电路,可直接输出适用于mcu的模拟电压,并集成了过流,过压,过温保护,硬件设置死区,软件编程等功能,大大的提高了电机驱动电路的安全性。电机预驱电路原理图如图8所示。
[0133]
预驱电路中左半部分为与低压模块通讯引脚,接收mcu的pwm开关信号,必要时对每一路pwm获得互补信号,用于驱动每一相半桥的高边和底边mos,nfault引脚用于输出芯片状态信息,过温过流等错误均会导致报警拉低该引脚,同时切断驱动电源。该芯片so1和so2引脚用于输出放大和偏置后的采样电阻两端电压,中间通过串联一个rc滤波环节来消除噪声污染。vense引脚和外部电阻r1,r4用于设置电源buck的输出电压,r16电阻用于硬件上编程互补pwm的死区时间,防止半桥短路导致切断驱动电源。
[0134]
三相半桥驱动电路采用预驱动芯片drv8301,其原理图如图3所示。该电路由三个半桥共6各n-mos管组成,mos选用了aon6242,该mos管最大源极电流为85a,在10v栅源电压下r
ds
小于3.6mω。mos管各个栅极由电机预驱芯片直接驱动。此外在其中两项半桥的低端各串联一个2412尺寸的5mω的电流采样电阻用于foc算法,另外一相的电流由基尔霍夫电流定律获得。该采样电阻两端的电压由drv8301直接采集,并通过运放电路将电压转换为0v到3.3v的模拟电压,主控mcu指节获得的采样电压与采样电阻流经电流之间的关系为:
[0135][0136]
其中r为采样电阻阻值,k
gain
为运放增益,u为ad采集到的电压。三相半桥电路的电源直接由外部电源供应。电机预驱芯片通过监测高端mos和低端mos的源极端电压来监测电压和流经漏极源极间的电流。
[0137]
本实施方式中,预驱动芯片drv8301具有死区设置和过流过温保护,且可对外提供一个恒压源,可为mcu提供电源。mcu通过pwm驱动预驱芯片,进而驱动三相半桥。
[0138]
下面对本发明提出的假手指本体的运动学和动力学进行分析:
[0139]
假手指mcp(掌指关节)和pip(近端指间关节)为主动自由度,dip(远端指间关节)与pip耦合,转角一致。假手指d-h模型如图11所示。其中t0、t1、t2、t3、tt分别为基坐标系,mcp关节坐标系,pip关节坐标系,dip关节坐标系和指肚坐标系,其它参数以此类推。t1到t0的变换矩阵为:
[0140][0141]
t2到t1的变换矩阵和t3到t2的变换矩阵:
[0142][0143]
tt到t3的变换矩阵:
[0144][0145]
对该矩阵位置矢量微分可得到假手指速度雅可比矩阵:
[0146][0147]
x=x
t cos(θ1 2θ2)-y
t sin(θ1 2θ2) l
1 cos(θ1) l
2 cos(θ1 θ2);
[0148]
y=x
t sin(θ1 2θ2) y
t cos(θ1 2θ2) l
1 sin(θ1) l
2 sin(θ1 θ2);
[0149]
假手指速度雅可比方程:
[0150][0151]
其中:
[0152]r11
=-x
t sin(θ1 2θ2)-y
t cos(θ1 2θ2)-l
1 sin(θ1)-l
2 sin(θ1 θ2);
[0153]r12
=-2x
t sin(θ1 2θ2)-2y
t cos(θ1 2θ2)-l
2 sin(θ1 θ2);
[0154]r21
=x
t cos(θ1 2θ2)-y
t sin(θ1 2θ2) l
1 cos(θ1) l
2 cos(θ1 θ2);
[0155]r22
=2x
t cos(θ1 2θ2)-2y
t sin(θ1 2θ2) 2l
2 cos(θ1 θ2);
[0156]
求解运动学逆解:
[0157][0158][0159]
其中:
[0160]
a=x-x
tr11-y
tr12
;
[0161]
b=y-x
tr21-y
tr22
;
[0162][0163]
[0164]
且rii为指肚坐标系矩阵第i行i列元素,θ1和θ2被限制在关节运动范围内。
[0165]
假手指牛顿-欧拉方程和动力学参数辨识:
[0166]
使用牛顿-欧拉法建立假手指前两个手指指节的动力学迭代方程,最终得到的动力学方程:
[0167][0168]
其中τ1和τ2分别为mcp和pip关节扭矩输出,θ为mcp和pip关节转角。
[0169]
为抵消重力影响,极坐标系线加速度设为重力加速度的反向矢量与本身线加速度的矢量和,极坐标系角加速度,角速度及线加速度均可通过手背处的惯性测量单元计算得到。
[0170]
由于dip关节和pip关节通过键绳耦合,dip扭矩负载将直接传递到近指节,键绳传动受力分析如图12所示。
[0171]
对于mcp关节其动力学方程中的广义力内推应改写为:
[0172][0173][0174]
对于pip关节其广义力内推应该为:
[0175][0176]
对于dip关节其关节受力应该改写为:
[0177][0178]
其中f
cable
为键绳上对近指节关节盘轮的拉力,fe为远指节所受外部力。以上各式变动的物理含义为远指节输出的扭矩,由于变更其为从动自由度,将转移为mcp和pip的附加扭矩输出。
[0179]
动力学方程中各个连杆的重心位置和各连杆惯性矩矩阵为固有参数,通过多次测量解方程组得出,然而传动中的摩擦力影响随相对运动速度等其它因素变化,同时测得的动力学参数并非完全正确,因此在动力学控制中,引入动力学前馈加pid反馈的控制策略。
[0180]
本发明中,假手指的功能性取决于其能表达的手势种类,假手指自由度越高,灵巧性也越高,本发明将驱动源内置于假手指中,采用两个电机作为主动自由度驱动源、远指节3耦合驱动的方式,提高手指的灵巧性。
[0181]
本发明中,采用无刷直流电机5作为驱动动力源,无刷直流电机5相比于直流电机无换相火花,且可通过算法消除转矩脉动,减小电机转动过程中的噪声,同时拥有更高的能耗比。
[0182]
虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其他所述实施例中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
