1.本发明涉及用于机动车辆设备的电马达领域,尤其涉及用于擦拭器装置的无刷直流电马达。
背景技术:
2.控制无刷直流电机需要至少在某些精确的点上确定转子的位置,以便能够施加脉宽调制命令,使得有可能实现期望的旋转速度。
3.为此目的,已知使用位置传感器,尤其是霍尔效应传感器,这使得能够确定转子的某些位置。
4.然而,为了降低电马达的成本,省去这些位置传感器可能是有益的,其成本是不可忽略的。
5.也可以使用过零方法,通过测量电马达各相的电动势来确定转子的位置。然而,电马达必须以大于预定旋转速度的速度旋转,以使电动势足够高,从而能够被检测到。
6.因此,通过在启动时施加预定命令直到达到预定旋转速度,可以在没有传感器的情况下驱动电马达。
7.然而,在擦拭器装置的情况下,还需要将马达停止在对应于停止位置(或“停放位置”)的预定位置。该停止位置通常通过与擦拭器装置的连杆机构相关联的传感器来提供。因此,停止电马达的一种方式是当到达停止位置时,短路向电马达的相供电的逆变器的支路,以便完全停止电马达。然而,当电马达以其标称速度旋转时,逆变器支路的这种短路产生显著的电流峰值,这可能损坏逆变器中使用的晶体管,从而导致电马达故障。克服这个问题的一种方法是加大晶体管的尺寸,以便能够承受这些电流峰值,但是这涉及到相当大的成本,这与降低电马达总成本的愿望相违背。
8.因此,有必要找到一种解决方案,使得能够控制无刷和无传感器电马达,同时仍然允许电马达停止在预定位置,并且不损坏用于向电马达供电的晶体管。
技术实现要素:
9.为此,提出了一种用于控制用于机动车辆设备的无刷和无传感器直流电马达的方法,其中电马达包括转子和通过施加到电马达的逆变器的脉宽调制供电的相,并且其中,超过转子的旋转速度的最小阈值,转子的位置由电马达的相处的电动势的测量值来确定,
10.其特征在于,在命令停止电马达的情况下,通过修改脉宽调制,在第一预定旋转速度和高于所述第一预定旋转速度10%之间的区间内,电马达的旋转速度从标称旋转速度降低到第二预定旋转速度,然后当到达预定位置时,通过短路逆变器的支路,电马达停止在预定位置。
11.一种用于控制无刷和无传感器电马达的方法的使用,其中,当电马达停止时,速度被降低到基本上等于最小速度的旋转速度,对于该最小速度,能够测量电马达各相的电动势,以便检测转子的位置,然后短路逆变器的支路,以在到达期望的停止位置时停止电马
达,从而使得可以降低当逆变器的支路短路时产生的电流峰值的强度。这有利地使得可以将电马达停止在期望的位置,而不会损坏用于向电马达供电的晶体管。
12.根据实施方式之一,旋转速度降低到预定旋转速度包括与电马达旋转速度的各种降低相关联的多个增量。
13.根据另一实施方式,电动马达与齿轮减速装置相关联,从而形成齿轮马达,该齿轮马达构造成驱动包括至少一个擦拭器臂的机动车辆擦拭器装置。所述擦拭器装置包括与刮水臂的停止位置相关联的停止传感器。预定位置由停止传感器给出,并且来自停止传感器的信号用于确定旋转速度应该降低的时间。
14.根据另一实施方式,停止传感器被修改以提供减速位置,从该减速位置电马达的旋转速度应该被降低,以允许擦拭器装置停止在停止位置,例如在停止位置之前5
°
或10
°
。
15.根据另一实施方式,当电动马达的旋转速度大于最小阈值时,擦拭器臂的位置从由电动势确定的转子位置和从齿轮减速器的齿轮减速比推导出。
16.本发明还涉及一种用于机动车辆擦拭器装置的齿轮马达,该齿轮马达包括无刷且无传感器的直流电马达,其中该电马达包括转子、控制单元和通过施加到电马达逆变器的脉宽调制供电的相。控制单元被配置成根据电马达各相处超过转子的旋转速度的最小阈值的电动势的测量值来确定转子的位置。
17.在命令停止电马达的情况下,控制单元被配置为通过修改脉宽调制,在所述最小阈值和高于所述最小阈值10%之间的区间内,将电马达的旋转速度从标称速度降低到预定旋转速度,然后当到达预定位置时,通过短路逆变器的支路,在预定位置停止电马达。
18.根据一个实施例,预定位置由与擦拭器装置的停止位置相关联的停止传感器给出,控制单元被配置成使用来自所述停止传感器的输出信号,以便确定转子的旋转速度应当降低的时间。
19.根据另一个实施例,停止传感器被修改以提供减速位置,从该减速位置电马达的旋转速度应该被降低,以允许擦拭器装置停止在停止位置。
20.本发明还涉及一种擦拭器装置,特别是用于机动车辆的擦拭器装置,包括如上所述的齿轮马达。
附图说明
21.通过阅读下面的描述和附图,本发明的其它特征和优点将变得更加明显,下面的描述是通过说明性和非限制性的例子给出的,在附图中:
22.图1示出了电马达及其控制逆变器的示意图;
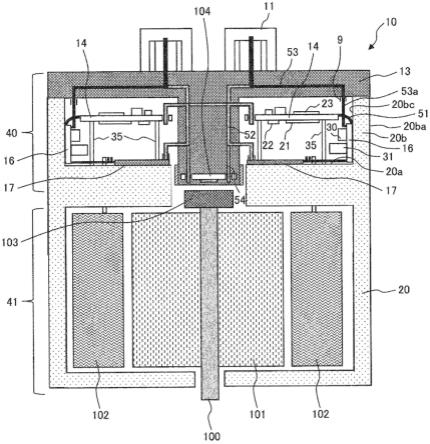
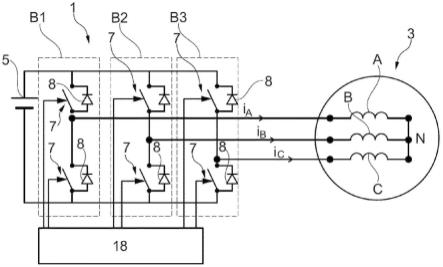
23.图2示出了擦拭器装置的一部分的示意性透视图;
24.图3示出了停止传感器的一部分的示意图;
25.图4示出了配备有停止传感器的金属轨道的轮的示意图;
26.图5示出了用于控制电马达的方法的步骤的流程图。
27.在这些图中,相同的元件具有相同的附图标记。
具体实施方式
28.以下实施例是示例。尽管描述擦参考一个或多个实施例,但这并不一定意味着每
个参考涉及相同的实施例,或者特征仅适用于一个实施例。各种实施例的各个特征也可以被组合或互换,以便创建其他实施例。
29.本发明涉及一种用于控制机动车辆擦拭器装置的电马达的方法。
30.图1示出了用于三相电马达3的电源逆变器1的电路图,特别是用于机动车辆擦拭器装置的电马达3。逆变器1包括三个支路,标记为b1、b2和b3,配置为分别向电马达3的三相a、b和c供电,每个支路b1、b2、b3一方面连接到电源5的正极端子,例如车辆电池,另一方面连接到对应于电源5的负极端子的地。每个支路b1、b2、b3包括串联连接的两个开关7,通常由晶体管形成。二极管8通常与每个晶体管7并联布置。相应支路b1、b2、b3的两个晶体管7之间的中心抽头(tap)连接到电马达3的相应相a、b、c。
31.为了控制电马达3的旋转,脉宽调制命令被施加到电马达3的相a、b、c。通过经由控制单元18命令晶体管7的打开和关闭来施加该命令。在正常操作期间,支路b1、b2、b3的两个开关7处于相反的状态(一个断开,而另一个闭合)。此外,总是有相a、b或c没有被供电(开关7在断开位置连接到电源的正极端子)。
32.电动马达3包括转子。当转子旋转得足够快时,也就是说,以大于转子的旋转速度的最小阈值s
min
的速度旋转时,可以测量未被供电的相a、b或c处的电动势,并且通过检测所测量的电压过零的时间来推断电马达3的转子的位置,这被称为“过零”技术。
33.脉宽调制命令例如由用于控制电马达3的控制单元18施加。此外,当电马达3启动时,可以应用预定的命令序列,使得可以达到旋转速度s
min
,而不需要确定转子的位置,因此不使用位置传感器。以同样的方式,可以应用另一个预定的命令序列来停止电马达,而不需要位置传感器,但是这种方法不可能将电马达3停止在期望的停止位置。
34.图2示出了用于机动车辆的擦拭器装置9的示意图。如图1所示,擦拭器装置9包括由逆变器1控制的电马达3。齿轮减速机构(不可见)布置在电动马达3的输出处,以便形成齿轮马达10。齿轮减速器的齿轮减速比例如是1/69。齿轮减速器的输出连接到连杆机构11,连杆机构11使得齿轮减速器的输出和擦拭器装置9的一个或多个擦拭器臂(未示出)之间能够机械连接。连杆机构11包括例如一组连杆和曲柄,使得可以将电马达3的旋转运动转换成一个或多个擦拭器臂的往复运动。为了确保擦拭器臂停止在预定的停止位置,停止传感器13,也称为“停车指”,布置在擦拭器装置11中,例如在连杆机构11中或者在齿轮减速器的输出处。
35.图3和4示出了这种停止传感器13的一个示例性实施例。传感器13包括金属,因此包括导电轨道15,其具有例如小于10兆欧的电阻。金属轨道15布置在由非导电材料例如塑料制成的轮17上。金属轨道15包括圆形部分15a,附件15b从该圆形部分15a向外延伸有限的角度部分。传感器13还包括两个触点19a和19b,例如由两个金属刀片形成,配置成以便与金属轨道15接触。第一触点19a被配置成以便与金属轨道15的圆形部分15a接触,并且与金属轨道15永久接触,而第二触点19b被配置成以便与附件15b接触,使得第二触点仅在对应于附件15b的有限角度部分与金属轨道15接触,并且在其余时间与非导电轮17接触。
36.因此,通过测量两个触点19a和19b之间的电阻,可以检测金属轨道15的附件15b与第二触点19b接触的时间,因为两个触点19a和19b之间的电阻由于金属轨道15的导电特性而变得基本为零。轮17因此被配置成使得与附件15b相关联的角区域对应于停止位置。然而,可以修改轮(尤其是金属轨道15)的构造,使得附件15b的位置对应于停止位置以外的位
置,例如在停止位置之前5
°
或10
°
。
37.根据第一实施例,为了在电马达3停止时限制这些电流峰值的强度,停止传感器13被修改成使得附件对应于位于停止位置之前的减速位置,例如在停止位置之前5
°
或10
°
。此外,在运行期间以及当擦拭器装置11停止时,当到达减速位置并且通过停止传感器13检测到减速位置时,控制单元18被配置为降低电马达3的旋转速度。因此,控制单元18被配置成接收和使用来自停止传感器13的输出信号。电马达3的旋转速度降低到对应于最小阈值s
min
的预定旋转速度v1,对于该预定旋转速度,转子的位置能够根据在相a、b、c处测量的电动势或者稍大于该最小阈值s
min
的速度来确定。预定旋转速度v1例如在最小阈值s
min
和比最小阈值s
min
大10%的旋转速度之间的区间内。
38.因此,当电马达3停止时,速度首先降低,以便从标称运行速度(通常有多个标称速度)改变到接近最小阈值s
min
的速度。从标称速度到预定旋转速度v1的降低可以以基本上线性的方式或以增量的方式实现,经过各种预定位置的各种中间速度,以便在到达停止位置之前达到预定速度v1。特别地,增量的配置可以根据发送停止电马达3的命令时的标称速度而不同。
39.控制单元18被配置为当到达停止位置时,通过短路逆变器1的支路b1、b2、b3来停止电马达3的转子。该停止位置由在电马达3的各相测量的电动势和齿轮减速器的减速比确定。
40.实际上,电动势使得能够确定转子的位置(这是可能的,因为预定旋转速度大于最小阈值s
min
),并且齿轮减速比使得能够从转子的位置推导出一个或多个擦拭器臂的位置。
41.当到达停止位置时,短路逆变器1的支路因此导致低强度的电流峰值,这是由于降低的旋转速度(与电马达3的标称旋转速度相比)。
42.根据第二实施例,停止传感器13没有被修改并且指示停止位置。然后,根据由电动势和齿轮减速器的减速比估计的转子位置来确定第一预定位置。
43.实际上,如上所述,当电马达的旋转速度足够时,换句话说,大于所述最小阈值s
min
时,一个或多个擦拭器臂的位置可以根据由电动势确定的转子位置来估计。
44.然而,由于转子位置的确定是相对位置的测量,所以有必要使用停止传感器13来具有位置参考。所有类型的无传感器控制,例如电动势的测量,使得估计一个或多个擦拭器臂的两个停止位置之间的擦拭器臂的位置成为可能。这尤其使得能够在臂到达停止位置之前确定臂的位置,例如到达位于停止位置之前5
°
的第一预定位置。然后,当估计位置对应于第一预定位置时,速度降低到预定旋转速度v1。接下来,当到达由停止传感器13给出的停止位置时(以v1速度),逆变器1的支路b1、b2、b3被短路,以便将电马达3停止在该停止位置。以与前述实施例相同的方式,逆变器1的晶体管7中产生的电流峰值减小(与当电马达13以额定速度旋转时产生短路时产生的峰值相比)。
45.现在将基于图5描述如上所述的用于控制擦拭器装置的电马达3的方法的各个步骤。本发明更具体地涉及当电马达3停止时控制电马达3,但是也将描述与电马达3的启动和正常运行相关的步骤。
46.第一步骤101涉及激活擦拭器装置11。这种激活例如对应于车辆使用者的手动命令的启动,这导致激活信号被发送到控制单元18。
47.第二步骤102涉及启动电马达3。在接收到致动命令之后,用于控制电马达3的控制
单元18向逆变器1施加预定序列的脉宽调制命令。该步骤可以在知道或不知道电马达3的转子位置的情况下执行。
48.第三步103涉及将电马达3的旋转速度稳定在额定速度。该标称速度大于最小阈值smin,这意味着用于实现该标称速度的脉宽调制控制是通过根据在逆变器1的支路处测量的电动势确定的转子位置来实现的。擦拭器装置1可以包括多个标称速度,通常为两个,使得使用者能够根据需要随时间改变标称速度。在所有情况下,使用在逆变器1的支路b1、b2、b3处测量的电动势来调节电马达3。
49.第四步骤104涉及停止擦拭器装置1的命令。该命令对应于例如来自使用者的手动命令,这使得停止信号被发送到控制单元18。
50.第五步骤105涉及将电马达3的旋转速度降低到预定旋转速度。当擦拭器装置1处于预定位置时,例如在停止位置之前5
°
时,执行这种减小。
51.根据第一实施方式,该位置由停止传感器13给出,被修改以便检测该预定位置,换句话说减速位置。
52.根据第二实施方式,借助于在逆变器1的支路b1、b2、b3测量的电动势、齿轮减速器的齿轮减速比和来自停止传感器13的先前信号,从转子的估计位置确定该位置。
53.旋转速度的降低可以是线性的或递增的(第一次速度降低应用在位置-15
°
和-10
°
之间(在停止位置之前,其对应于0
°
参考位置),然后第二次速度降低应用在位置-10
°
和-5
°
之间)。也可以应用非线性减少。
54.第六步骤106涉及当到达停止位置时,通过短路逆变器1的支路b1、b2、b3将电马达3停止在停止位置。
55.根据第一实施方式,借助于在逆变器1的支路b1、b2、b3处测量的电动势、齿轮减速器的齿轮减速比以及来自对应于位置5
°
的停止传感器13的先前信号,根据转子的估计位置来确定停止位置的到达。
56.根据第二实施例,停止位置由停止传感器13给出。逆变器1的支路b1、b2、b3的短路导致电马达3非常快速的停止,因此对应于擦拭器装置11在停止位置的停止。此外,由于短路前速度降低,逆变器1的晶体管7中产生的电流峰值降低,从而可以避免使用过大的晶体管7,从而限制逆变器1的成本。
57.如上所述的擦拭器装置11的电马达3的停止的管理因此使得在这种装置中使用无刷和无传感器的直流电马达3成为可能,同时使用有限容量的晶体管7,因此具有有限的成本。因此可以降低擦拭器装置11的总成本,同时仍然为使用者保持相同的操作质量(将刮水臂停止在停止位置)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。