静电发电机电极定心和隔震系统
1.相关申请的交叉引用
2.本技术要求2019年12月28日提交的题为“electrostatic generator electrode-centering and seismic-isolation system for flywheel-based energy storage modules(用于基于飞轮的储能模块的静电发电机电极定心和隔震系统)”的美国专利申请号16/729,317的优先权,该美国专利申请是2016年7月5日提交的题为“electrostatic generator electrode-centering and seismic-isolation system for flywheel-based energy storage modules(用于基于飞轮的储能模块的静电发电机电极定心和隔震系统)”的美国专利申请号15/202,446的部分继续案,上述专利申请通过引用合并于此。
3.关于政府赞助的研究或开发的声明
4.美国政府根据美国能源部与劳伦斯利弗莫尔国家安全有限公司之间的合同号de-ac52-07na27344对本发明享有关于劳伦斯利弗莫尔国家实验室操作的权利。
技术领域
5.本技术涉及静电发电机,更具体地涉及用于维持静电发电机的飞轮转子的定子电极与旋转电极之间的间隙的系统。本文讨论了一种用于基于飞轮的储能模块的静电发电机电极定心和隔震系统。
背景技术:
6.在基于飞轮的储能模块的设计中,存在着必须考虑以在面对环境问题时实现操作的关键机械和结构要求。环境问题的示例包括热和机械扰动以及地震事件。因此,用被动磁轴承和稳定技术增强的鲁棒装置设计对于成功地实施下一代实用静电(es)发电机和电动机是至关重要的。
7.作为示例,大容量基于es的储能系统可以受益于磁轴承和悬浮技术的使用,其实施例在本文中描述。这些电动机和发电机必须在高转速下操作,同时在系统的设置、初始旋转加速和稳态操作期间维持严格的尺寸公差。另外,在存在环境扰动的情况下,必须维持这些临界公差,环境扰动包括冲击加速度,诸如由地震活动引起的冲击加速度。
8.如现有技术所述,静电(es)发电机/电动机可以以发电机或电动机模式操作。在大量商业和国防应用中,这种装置应用于飞轮以用于大容量储能。通常,静电发电机/电动机涉及使用一起包括电容器(或电容)的旋转和固定元件的组件,电容器的电容随着旋转元件相对于固定元件的运动而周期性地变化。
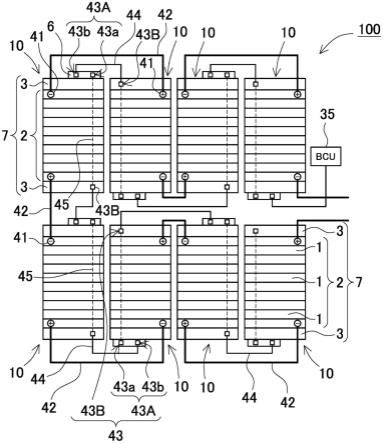
9.图1a(顶视图)和图1b(侧视图)中示出了现有技术中的es装置的示例。本发明人的授权专利(美国专利号7,834,513b2“electrostatic generator/motor having rotors of varying thickness and a central stator electrically connected together into two groups(变化厚度的转子和中心定子电连接到一起成两组的静电发电机/电动机)”)中描述了该现有技术。此处以引证的方式将美国专利号7,834,513并入。
10.现在转到图1a,描绘了扇形固定元件100的圆形阵列。在这个被称为“定子”的固定
元件阵列的下面是类似的圆形元件阵列,其被允许围绕竖轴旋转,被称为“转子”。图1b示出了整体es结构的横截面侧视图,示出了由一组两个转子106构成的实施例,其中各个相应的转子也包括扇形元件的圆形阵列。各个相应的转子板通过相对的扇形元件的固定阵列而结合在各个圆形表面上。在第一转子106的情况下,有一对这样的定子盘100和104;并且在第二转子106的情况下,有第二对定子盘104和102。如图1a所示,允许转子板绕正交于固定板平面定向的轴线旋转。
11.如图1b所示,该装置架构中的转子106包括一组环形的扇形分段元件,其中各个这种元件具有大于盘的基本基体的厚度。通常,转子的厚的扇形分段元件可以由金属(导电)材料、介电材料或其组合构成。包括相对的固定板的各对固定的扇形元件形成具有固定间隙g的电容器,在其间,各个相应的转子旋转。转子盘由交替的凸起和基线区域的分段的“平台”或“岛”构成。这些分段岛的高度将导致跨该对相对的定子板的电容的伴随变化。当转子盘绕其轴线旋转时,各对相对的固定板之间的电容将周期性地变化。时间相关电容由转子盘与定子盘之间的电容间隙尺寸的差异产生。
12.通常,转子盘可以包括金属和/或介电材料,从而当转子的各个扇形段在阵列中的各对相应的固定隔开的定子盘之间通过时,产生时间相关的电容。注意到,图1a和图1b的基本配置可以被分类为平面几何结构,因为有效电容器经由基于盘的定子和转子的相对平面形成。
13.在另一现有技术的es装置实施例(未示出)中,定子和转子被配置为围绕公共轴线定向的圆柱形结构的集合。在该第二实施例中,一个(或多个)圆柱形结构围绕公共轴线(转子)旋转,而在不同半径处的其余圆柱形结构保持固定(定子)。作为该实施例的一个示例,各个圆柱形结构可以包括布置在环形圈中的小直径轴向金属杆的集合。在这种情况下,有效间隙g将是从一个(或多个)固定定子杆到整体结构中的一个(或多个)旋转转子杆的距离的时间相关差异的函数。
14.在大多数情况下,间隙g较小,通常在毫米范围内,使得电容最大化。而且,在操作期间,间隙g的变化可以改变其总间距的相当大的部分。由于es发电机的存储电场能量是操作期间最大电容与最小电容之比的函数,因此遵循该设计规则。
15.因此,通常,必须的是,es发电机/电动机的转子与定子电极之间的间距g在系统的设置、初始旋转加速和稳态操作期间维持在精密公差内。进一步关键的是,在存在环境扰动的情况下维持这些公差,环境扰动包括冲击加速度,诸如由地震活动引起的冲击加速度。
16.在操作期间,转子可能经历接近105cm/秒的旋转切向速度,同时将间隙间距g维持在2.5mm的量级,间隙间距g必须维持在毫米的分数内。本文描述的技术提供了实施例,这些实施例可以使es装置能够在这些严格的尺寸公差内运行,并且此外能够在面对真实世界环境扰动时维持这些关键尺寸公差。
17.海尔贝克(halbach)阵列在本领域中是公知的,并且包括以线性或圆形阵列形式布置的磁性元件的集合。图3示出了现有技术的线性海尔贝克阵列300的示例,其包括磁性元件310的线性序列。当元件310的集合被适当地配置时,所得到的磁场分布在阵列的一个表面上方最大,而在相对表面上方最小。图4示出了阵列400的计算的磁场分布,其配置对应于图3所示的配置。如图4所示,磁性元件的这种特定布置导致一个表面上方的磁场强度410增强;并且伴随地导致在相对表面上方的磁场强度420减小。
18.图5a中示出了现有技术的被动阵列稳定器的示例,描绘了轴线在竖向上的轴承元件。本发明人在授权专利(美国专利号5,847,480“passive magnetic bearing element with minimal power losses(具有最小功率损耗的被动磁轴承元件)”)中描述了该现有技术。该子系统采用具有补偿力导数的被动元件,以便在操作期间以最小的功率损失实现稳定的悬浮。在该示例中,稳定器采用空间周期性磁场,诸如由空间周期性磁阵列(例如,海尔贝克阵列)产生的空间周期性磁场,与电感电路元件组合,以产生克服来自其他元件的不稳定力导数的期望的稳定力导数。美国专利号5,847,480通过引用合并于此。
19.现在转到图5a,空间周期性磁阵列(例如,海尔贝克阵列)510和512通过轴514附接,并且位于电感电路(例如,电感负载电路)516的平面阵列的上方和下方。阵列516由具有电路导体518的电感电路构成,电路导体具有电感负载519。通常,阵列510固定到阵列512并与其隔开。图5b示出了图5a的平面导体阵列516和代表性磁体段515的顶视图,其中r1和r2对应于环形海尔贝克阵列磁体元件的相应内半径和外半径。平面导体阵列516在轴向上可移动地位于固定阵列510和512之间。
20.在该系统中,当平面电路的对称平面对应于磁体之间的中间平面时,通过平面电路的轴向通量被消除,仅当磁体阵列相对于平面电路竖直地位移时才变得有限。永磁体元件被布置为在与(相对)旋转的空间周期性磁体阵列对称地位于平面电路、感应电流的上方和下方的位置相对应的轴向位置处与外力(即,重力)达到力平衡。由此,该稳定器的电阻功率耗散将接近零。
技术实现要素:
21.在下文中,描述了可以通过实施三个相互关联的子系统来满足静电发电机的基于飞轮的储能模块的关键操作要求的实施例:(1)“间隙控制(gap control)”子系统,该子系统经由基于磁的定心提供定子和转子元件的被动轴向定位;(2)“被动阵列稳定器(passive array stabilizer)”子系统,该子系统经由海尔贝克磁阵列和感应技术提供被动三维稳定;以及(3)“触地轴承(touch-down bearing)”子系统,该子系统确保在装置旋转加速期间的稳定操作以及在面对瞬态扰动时不间断的装置功能。在以下示例性实施例中,共同采用这些技术的es装置将在真实世界条件下鲁棒地起作用,同时在三维中维持严格的公差和稳定性。
附图说明
22.并入本公开并形成本公开的一部分的附图例示了本技术的实施例,并且与说明书一起用于解释本技术的原理。
23.图1a描绘了现有技术的多元件静电电动机的顶视图,该静电电动机包括扇形平面电极。
24.图1b描绘了图1a的多元件静电电动机的横截面侧视图。
25.图2示出了用磁悬浮阵列和磁定心阵列增强的es装置的实施例。
26.图3示出了现有技术的线性海尔贝克磁阵列的示例。
27.图4示出了从图3的海尔贝克阵列得到的磁场分布的计算。
28.图5a描绘了现有技术的基于海尔贝克阵列的轴向稳定器的侧视图,该稳定器使用
一对盘形海尔贝克阵列来配置,在该对盘形海尔贝克阵列之间是电感电路盘,该电感电路盘关于公共轴线同轴配置。
29.图5b描绘了图5a的电感电路盘部件的顶视图。
30.图6示出了用基于海尔贝克的轴向稳定阵列增强的图2的es装置的实施例。
31.图7示出了触地轴承组件的实施例;
32.图8描绘了具有集成的触地轴承的es装置的实施例;
33.图9至图11示出了实施例,各个实施例具有交替的三元组阵列和基于海尔贝克的轴向稳定阵列配置,并且还包括导销、导套和压缩弹簧,以确保平面支撑平台的运动被限制为纯竖直运动。
34.图12至图15示出了电极定心和隔震系统的另选实施例,其中,各个实施例包括用于确保支撑平台的竖直运动的装置并且还包括触地轴承。
具体实施方式
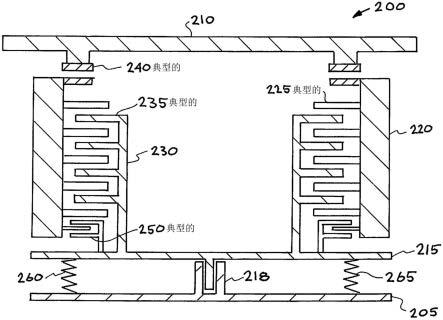
35.图2中示出了本技术的示例性实施例,描绘了基于飞轮的静电(es)电动机/发电机200。本技术的一个显著方面涉及将旋转电极(转子)的定心维持在相对于定子电极的精密公差内的方法。不失一般性,该实施例中的旋转转子的标称半径大于固定定子的标称半径。在其它实施例中,转子的标称半径可以小于定子的标称半径,在这种情况下,如本文讨论的类似的装置增强同样适用。
36.现在转到图2,示出了稳定的es装置200的基本部件。装置包括飞轮转子组件220,其由多个转子电极元件225构成。另外,装置包括固定的定子组件230,其由多个定子电极元件235构成。转子和定子元件被配置为使得它们沿着轴向彼此交替。
37.相应的转子和定子元件的径向对齐由一对非接触的环形悬浮阵列240保持,其中一个阵列固定到转子组件220,而相对的阵列固定到上支撑结构210。上悬浮阵列的各个场磁极被定向为使得该对环形磁性元件之间的力是吸引的。在这种配置中,径向对齐是稳定的,而轴向对齐是不稳定的。
38.相应的转子和定子元件的轴向对齐由磁性定心阵列250维持。该被动阵列提供了定心力,其作用在相应的支撑结构220和230之间。在该示例中,定心阵列250是三个环形磁体阵列的形式,称为“三元组阵列”。该阵列包括环形磁体或相对的环形海尔贝克阵列,其周期性是在径向上。包括三元组阵列250的各个元件的磁极被定向为使得在中心元件相对于集合的各个周围元件(即,上元件和下元件)之间形成排斥力。在这种配置中,轴向对齐是稳定的,而径向对齐是不稳定的。
39.返回到图2的实施例,包括三元组定心阵列的上阵列和下阵列从下面刚性地支撑在平面结构215上,该平面结构又由压缩弹簧260和265支撑。平台215还支撑定子组件230,相应的定子电极235附接到该定子组件。另一方面,三元组定心阵列250的中心元件刚性地附接到转子组件220,相应的转子电极235附接到该转子组件。另选地,定心阵列250的配置可以颠倒,使得两个外环形磁体附接到转子220的内表面,并且定心阵列250的中心环形磁体定位在两个外环形磁体之间且固定地附接到平面支撑平台215。
40.为了确保平面支撑平台215的运动被约束为完全竖直运动,其装配有一个或多个导销和导套218,如图2所示。基于本公开,用于约束支撑平台的另选装置对于本领域技术人
员将是显而易见的。在该实施例中还包括压缩弹簧定心元件260和265;以及隔震支撑结构205。压缩弹簧260和265的净刚度被选择为远小于定心三元组磁体阵列250的有效刚度。使用这种设计规则,转子电极225和定子电极235的相对轴向位置将被维持为几乎恒定,即使对于飞轮模块的支撑板215与基板205之间的间隙的大的(环境引起的)变化也是如此。
41.对于该系统,作为转子的竖直位置的变化δz的函数的定心三磁体阵列250的间隙(以及由此转子电极与定子电极之间的间隙)的变化δg由如下的方程(1)给出:
[0042][0043]
在此,有效刚度值k分别是组合压缩弹簧的刚度值k
spring
和下三元组环形永磁体阵列的刚度值k
brg
。从该方程可以看出,如果组合压缩弹簧260和265的刚度远小于下三元组磁体阵列250的刚度(即,比率k
spring
/k
brg
《《1),则由于外力而导致的与三元组250的中心磁体相对于上磁体和下磁体的位置的中心性的偏离δg将大大减小。在这些条件下,es发电机转子电极与定子电极之间的竖直间距g将受到最小的影响,由此得到更鲁棒地维持。下面将描述整个被动轴承系统的元件的附加刚度要求。
[0044]
在图2所示类型的被动磁轴承系统的操作中,下磁轴承组件和上磁轴承组件的不同之处在于,下组件250由排斥磁体阵列的三元组组成,而上组件240是完全吸引阵列。由于这种状况,下三轴承组件250在轴向上具有正刚度(由此对于轴向位移稳定),而在径向上具有负(不稳定)刚度。相反,上悬浮磁体阵列对240具有相反的特性。即,磁轴承240在径向上具有正刚度(稳定),在轴向上具有负刚度(不稳定)。
[0045]
根据各自的上轴承刚度和下轴承刚度的相对大小,各个相应的悬浮轴承系统将或者径向稳定而轴向不稳定,或者反之。这一事实源于所谓的基于恩绍定理(earnshaw theorem)的不稳定性。根据恩绍定理(当应用于磁系统时),任何磁悬浮元件,诸如利用固定部件与旋转部件之间的静磁力的磁轴承,不能稳定地处于与外力,例如重力,平衡的状态。换言之,如果这种轴承元件设计为针对径向定向的位移是稳定的,则其针对轴向定向的位移将是不稳定的,反之亦然。恩绍定理推导中隐含的假设是磁场本质上是静态的(即,它们由固定电流或固定磁化对象产生)并且排除了抗磁体。
[0046]
对恩绍定理所强加的限制的几乎普遍的响应如下:磁轴承元件被设计为沿着至少一个轴线(例如它们的对称轴线)是稳定的,然后外部稳定装置被用于确保沿着剩余轴线的稳定性。所提及的“装置”可以是机械的,即球轴承等,或者更通常地是电磁的。在后一种方法中,采用磁体线圈通过电子伺服放大器和检测旋转元件的初期不稳定运动的位置传感器提供稳定力,并将旋转元件恢复到力平衡的(否则不稳定的)位置。被动稳定技术也已经在现有技术中描述。
[0047]
图6示出了es装置600的实施例,其采用“被动阵列稳定器”子系统(类似于关于图5a和图5b所描述的内容),使用海尔贝克阵列来克服基于恩绍定理的不稳定性。除了稳定器之外,基本es装置在其它方面与参考图2所讨论的内容相同。在图6的实施例中,被动稳定器被配置为使得一对海尔贝克阵列610和612刚性地安装到转子组件220。另一方面,电感电路元件616刚性地安装到固定的定子板215。回想一下,定子组件230和定心阵列250也刚性地附接到定子板215。在有关实施例中,被动稳定器子系统可被配置为使得一对海尔贝克阵列
610和612安装到固定定子板215,而电感电路616元件安装到转子组件220。在操作上,两个实施例功能相同。本领域技术人员将理解公知的工程考虑将确定选择的方法。
[0048]
通常,被动阵列稳定器子系统可以用于规避各种类别的不稳定性,无论它们是轴向还是径向起源的。因此,本技术可以在这些情况中的任何一种情况下操作。如图6所描绘的,在此将仅描述整个系统在径向固有稳定(即,吸引轴承阵列对的正径向刚度大于三元组阵列的负径向刚度)的情况下的操作。对于这种情况,适当的海尔贝克阵列稳定器是“轴向稳定器”,即,其中稳定器的绕组位于上环形海尔贝克阵列与下环形海尔贝克阵列之间的中间,这些阵列的周期性在方位角方向上,并且阵列方位角地定向,使得它们的轴向场分量在中间平面处抵消,如图5a和图5b的现有技术实施例所述。
[0049]
回到图6,本技术在如下的部件的初始对齐中发挥作用:在装置的初始对齐步骤中,需要的是调节上悬浮阵列240的操作间隙,使得其组合的上悬浮轴承和下悬浮轴承在悬浮质量(飞轮转子、静电发电机/电动机和被动轴承系统的旋转元件)与重力的力平衡位置处具有净正径向刚度。
[0050]
一旦完成初始对齐过程,就轴向调节海尔贝克阵列稳定器阵列和/或稳定器绕组,使得阵列的零平面与稳定器绕组的中心平面以及转子及其附件的力平衡轴向位置一致。对于这种操作,包括允许定子电极跟随转子的轴向运动的低刚度压缩弹簧260和265既便于系统的设置,又另外提供了对地震活动的不敏感性。
[0051]
图7示出了子系统700,其被称为“触地轴承”,并且在转子的轴向或径向位移时开始操作。在一个实施例中,该轴承可以位于承载下悬浮被动轴承海尔贝克阵列的支撑板之上,并且由该支撑板支撑。轴承组件包括附接到转子的环形锥形狭槽710,加上由轴730支撑的球形“滚子”720的阵列,该轴又连接到支撑板,下被动轴承元件安装在该支撑板上。
[0052]
图8描绘了es装置800的实施例,触地轴承700集成到该es装置。触地轴承将执行如下两个功能:第一,对于在此描述的实施例,当转子静止时,其悬浮的被动磁轴承阵列在轴向上不稳定的事实意味着触地轴承将接合在其上或下锥形面上。当转子从静止旋转加速时,海尔贝克稳定器子系统将开始起作用并将转子拉到其力平衡轴向位置,该位置与稳定器的零通量位置一致。由此,该动作将自动地使触地轴承700脱离接合。第二,在来自地震活动的任何径向定向的加速度或任何轴向定向的地震活动未被压缩弹簧260和265充分吸收时,触地轴承700将开始起作用,并防止转子移动足以使es发电机的转子电极225和定子电极235彼此接触的(轴向)量。由此,图8示出了刚性地附接到触地轴承700的中心元件730的定心阵列250的两个外环形磁体。定心阵列250的中心环形磁体附接到转子220的内表面,并且定位在两个外环形磁体之间。另选地,定心阵列250的配置可以颠倒,使得两个外环形磁体附接到转子220的内表面,并且定心阵列250的中心环形磁体定位在两个外环形磁体之间且固定地附接到触地轴承700的中心元件730。
[0053]
总之,如本文所述,被动磁轴承和稳定子系统结合触地轴承子系统共同执行如下关键的主要功能:(1)在内表面上稳定悬浮飞轮转子,该内表面安装有静电发电机的旋转电极;(2)维持转子电极相对于定子电极轴向定心;以及(3)帮助保护转子和es发电机系统免受地震活动引起的损坏。
[0054]
在图9中,海尔贝克阵列610’和612’刚性地安装到平面支撑平台215。
[0055]
电感电路元件616’定位于海尔贝克阵列610’和612’之间,并且刚性地安装到转子
220的内表面。定心阵列250的两个外环形磁体附接到平面支撑平台215。定心阵列250的中心环形磁体定位在两个外环形磁体之间,并且附接到转子220的内表面。
[0056]
在图10中,海尔贝克阵列610’和612’刚性地安装到平面支撑平台215。
[0057]
电感电路元件616’定位于海尔贝克阵列610’和612’之间,并且刚性地安装到转子220的内表面。定心阵列250的两个外环形磁体附接到转子220的内表面。定心阵列250的中心环形磁体定位在两个外环形磁体之间,并且附接到平面支撑平台215。
[0058]
在图11中,海尔贝克阵列610和612刚性地安装到转子220的内表面。
[0059]
电感电路元件616定位于海尔贝克阵列610和612之间,并且刚性地安装到平面支撑平台215。定心阵列250的两个外环形磁体附接到转子220的内表面。定心阵列250的中心环形磁体定位在两个外环形磁体之间,并且附接到平面支撑平台215。
[0060]
在图12中,海尔贝克阵列610和612刚性地安装到转子220的内表面。
[0061]
电感电路元件616定位于海尔贝克阵列610和612之间,并且刚性地安装到平面支撑平台215。定心阵列250的两个外环形磁体附接到转子220的内表面。定心阵列250的中心环形磁体定位在两个外环形磁体之间,并且附接到平面支撑平台。
[0062]
除了支撑平台215被触地轴承700代替,图12与图6相同。除了支撑平台215被触地轴承700代替,图13与图9相同。除了支撑平台215被触地轴承700代替,图14与图10相同。除了支撑平台215被触地轴承700代替,图15与图11相同。
[0063]
广义地,本文公开了至少以下内容。
[0064]
描述了鲁棒静电(es)装置实施例,其以应用于储能飞轮为例,在存在热扰动和机械扰动以及地震事件的情况下提供可靠、高效的操作。静电发电机和电动机在用磁轴承、被动三维稳定技术和动态触地轴承增强时,能够在面对这些环境问题时实现鲁棒性能,而且在典型的操作序列(包括旋转加速和稳态模态)期间能够高效操作。
[0065]
本文还至少提出了以下实施方案:
[0066]
作为第一实施方案,提出了一种设备,该设备包括:
[0067]
开口圆柱形转子,该开口圆柱形转子具有中心旋转轴线和内表面;
[0068]
第一支撑结构,该第一支撑结构相对于所述转子是固定的;
[0069]
第一环形元件,该第一环形元件的最外边缘附接到所述转子的所述内表面的第一位置;
[0070]
第二环形元件,该第二环形元件附接到所述第一支撑结构,其中,所述第二环形元件定位为接近所述第一环形元件,其中,所述第一环形元件和所述第二环形元件中的至少一个被配置为磁性吸引所述第一环形元件和所述第二环形元件中的另一个;
[0071]
第二支撑结构;
[0072]
轴向稳定器,该轴向稳定器选自由第一三元组阵列和第二三元组阵列构成的组,其中,所述第一三元组阵列包括:
[0073]
第一磁性环形元件,该第一磁性环形元件附接到所述转子的所述内表面的第二位置;
[0074]
第二磁性环形元件,该第二磁性环形元件附接到所述第二支撑结构;以及
[0075]
第三磁性环形元件,该第三磁性环形元件附接到所述第二支撑结构,其中,所述第二磁性环形元件和所述第三磁性环形元件定位在所述第一磁性环形元件的彼此相对的侧
上,并且两者磁性排斥所述第一磁性环形元件,并且其中,所述第二三元组阵列包括:
[0076]
第一磁性环形元件,该第一磁性环形元件附接到所述第二支撑结构;
[0077]
第二磁性环形元件,该第二磁性环形元件附接到所述转子的所述内表面的第三位置;以及
[0078]
第三磁性环形元件,该第三磁性环形元件附接到所述转子的所述内表面的第四位置,其中,所述第二磁性环形元件和所述第三磁性环形元件定位在所述第一磁性环形元件的相对侧上,并且两者磁性排斥所述第一磁性环形元件;
[0079]
基部和至少一个压缩弹簧,该至少一个压缩弹簧附接到所述第二支撑结构和所述基部并且位于所述第二支撑结构与所述基部之间;
[0080]
导管,该导管固定地附接到所述基部;
[0081]
导轴,该导轴固定地附接到所述第二支撑结构,其中,所述导管被配置为接收所述导轴;以及
[0082]
被动稳定器,该被动稳定器选自由第三三元组阵列和第四三元组阵列构成的组,其中,所述第三三元组阵列包括:
[0083]
第一环形磁体元件,该第一环形磁体元件具有固定地附接到所述转子的所述内表面的第五位置的边缘;
[0084]
第二环形磁体元件,该第二环形磁体元件具有固定地附接到所述转子的所述内表面的第六位置的边缘;以及
[0085]
第一感应元件,该第一感应元件固定地附接到所述第二支撑结构,其中,所述第一感应元件位于所述第一环形磁体元件与所述第二环形磁体元件之间,并且其中,所述第四三元组阵列包括;
[0086]
第三环形磁体元件,该第三环形磁体元件具有固定地附接到所述第二支撑结构的边缘;
[0087]
第四环形磁体元件,该第四环形磁体元件具有固定地附接到所述第二支撑结构的边缘;以及
[0088]
第二感应元件,该第二感应元件具有固定地附接到所述转子的所述内表面的第七位置的边缘,其中,所述第二感应元件位于所述第三环形磁体元件与所述第四环形磁体元件之间。
[0089]
根据前述或以下实施方案中任一个的另外实施方案在并非不相容的程度上涉及:所述第二支撑结构包括具有至少一个球形元件的轴承支撑结构,所述设备还包括固定地附接到所述转子的环形轴承元件,其中,所述环形轴承元件包括面向所述中心旋转轴线的环形锥形狭槽,其中,所述至少一个球形元件的一部分定位在所述狭槽内。
[0090]
根据前述或以下实施方案中任一个的另外实施方案在并非不相容的程度上涉及:当所述转子静止时,所述至少一个球形元件将与所述环形轴承元件接触,其中,当所述转子从静止旋转加速时,所述至少一个球形元件将达到其将不再与所述环形轴承元件接触的速度。
[0091]
根据前述或以下实施方案中任一个的另外实施方案在并非不相容的程度上涉及:具有至少一个球形元件的轴承支撑结构,其中,所述轴承支撑结构固定地附接到所述第二支撑结构,所述设备还包括固定地附接到所述转子的环形轴承元件,其中,所述环形轴承元
件包括面向所述中心旋转轴线的环形锥形狭槽,其中,所述至少一个球形元件的一部分定位在所述狭槽内。
[0092]
根据前述或以下实施方案中任一个的另外实施方案在并非不相容的程度上涉及:当所述转子静止时,所述至少一个球形元件将与所述环形轴承元件接触,其中,当所述转子从静止旋转加速时,所述至少一个球形元件将达到其将不再与所述环形轴承元件接触的速度。
[0093]
根据前述或以下实施方案中任一个的另外实施方案在并非不相容的程度上涉及:所述第一环形元件与所述第二环形元件一起包括选自由以下内容构成的组的配置:(i)其中,所述第一环形元件是铁磁材料,并且其中,所述第二环形元件是磁体,(ii)其中,所述第一环形元件是磁体,并且其中,所述第二环形元件是铁磁材料,(iii)其中,所述第一环形元件是铁磁材料,并且其中,所述第二环形元件是海尔贝克阵列,(iv)其中,所述第一环形元件是海尔贝克阵列,并且其中,所述第二环形元件是铁磁材料,以及(v)其中,所述第一环形元件是海尔贝克阵列,并且其中,所述第二环形元件是海尔贝克阵列。
[0094]
根据前述或以下实施方案中任一个的另外实施方案在并非不相容的程度上涉及:所述至少一个压缩弹簧中的每一个的净刚度小于所述三元组阵列的有效刚度。
[0095]
根据前述或以下实施方案中任一个的另外实施方案在并非不相容的程度上涉及:所述设备是基于飞轮的静电(es)电动机/发电机。
[0096]
另外的实施方案涉及:一种方法,该方法包括:
[0097]
提供设备,该设备包括:
[0098]
开口圆柱形转子,该开口圆柱形转子具有中心旋转轴线和内表面;
[0099]
第一支撑结构,该第一支撑结构相对于所述转子是固定的;
[0100]
第一环形元件,该第一环形元件的最外边缘附接到所述转子的所述内表面的第一位置;
[0101]
第二环形元件,该第二环形元件附接到所述第一支撑结构,其中,所述第二环形元件定位为接近所述第一环形元件,其中,所述第一环形元件和所述第二环形元件中的至少一个被配置为磁性吸引所述第一环形元件和所述第二环形元件中的另一个;
[0102]
第二支撑结构;
[0103]
轴向稳定器,该轴向稳定器选自由第一三元组阵列和第二三元组阵列构成的组,其中,所述第一三元组阵列包括:
[0104]
第一磁性环形元件,该第一磁性环形元件附接到所述转子的所述内表面的第二位置;
[0105]
第二磁性环形元件,该第二磁性环形元件附接到所述第二支撑结构;以及
[0106]
第三磁性环形元件,该第三磁性环形元件附接到所述第二支撑结构,其中,所述第二磁性环形元件和所述第三磁性环形元件定位在所述第一磁性环形元件的彼此相对的侧上,并且两者磁性排斥所述第一磁性环形元件,并且其中,所述第二三元组阵列包括:
[0107]
第一磁性环形元件,该第一磁性环形元件附接到所述第二支撑结构;
[0108]
第二磁性环形元件,该第二磁性环形元件附接到所述转子的所述内表面的第三位置;以及
[0109]
第三磁性环形元件,该第三磁性环形元件附接到所述转子的所述内表面的第四位
置,其中,所述第二磁性环形元件和所述第三磁性环形元件定位在所述第一磁性环形元件的相对侧上,并且两者磁性排斥所述第一磁性环形元件;
[0110]
基部和至少一个压缩弹簧,该至少一个压缩弹簧附接到所述第二支撑结构和所述基部并且位于所述第二支撑结构与所述基部之间;
[0111]
导管,该导管固定地附接到所述基部;
[0112]
导轴,该导轴固定地附接到所述第二支撑结构,其中,所述导管被配置为接收所述导轴;以及
[0113]
被动稳定器,该被动稳定器选自由第三三元组阵列和第四三元组阵列构成的组,其中,所述第三三元组阵列包括:
[0114]
第一环形磁体元件,该第一环形磁体元件具有固定地附接到所述转子的所述内表面的第五位置的边缘;
[0115]
第二环形磁体元件,该第二环形磁体元件具有固定地附接到所述转子的所述内表面的第六位置的边缘;以及
[0116]
第一感应元件,该第一感应元件固定地附接到所述第二支撑结构,其中,所述第一感应元件位于所述第一环形磁体元件与所述第二环形磁体元件之间,并且其中,所述第四三元组阵列包括;
[0117]
第三环形磁体元件,该第三环形磁体元件具有固定地附接到所述第二支撑结构的边缘;
[0118]
第四环形磁体元件,该第四环形磁体元件具有固定地附接到所述第二支撑结构的边缘;以及
[0119]
第二感应元件,该第二感应元件具有固定地附接到所述转子的所述内表面的第七位置的边缘,其中,所述第二感应元件位于所述第三环形磁体元件与所述第四环形磁体元件之间;以及
[0120]
旋转所述转子。
[0121]
根据前述或以下实施方案中任一个的另外实施方案在并非不相容的程度上涉及:一种方法,其中,所述第二支撑结构包括具有至少一个球形元件的轴承支撑结构,所述设备还包括固定地附接到所述转子的环形轴承元件,其中,所述环形轴承元件包括面向所述中心旋转轴线的环形锥形狭槽,其中,所述至少一个球形元件的一部分定位在所述狭槽内,其中,当所述转子静止时,所述至少一个球形元件将与所述环形轴承元件接触,其中,当所述转子从静止旋转加速时,所述至少一个球形元件将达到其将不再与所述环形轴承元件接触的速度。
[0122]
根据前述或以下实施方案中任一个的另外实施方案在并非不相容的程度上涉及:一种方法还包括具有至少一个球形元件的轴承支撑结构,其中,所述轴承支撑结构固定地附接到所述第二支撑结构,所述设备还包括固定地附接到所述转子的环形轴承元件,其中,所述环形轴承元件包括面向所述中心旋转轴线的环形锥形狭槽,其中,所述至少一个球形元件的一部分定位在所述狭槽内,其中,当所述转子静止时,所述至少一个球形元件将与所述环形轴承元件接触,其中,当所述转子从静止旋转加速时,所述至少一个球形元件将达到其将不再与所述环形轴承元件接触的速度。
[0123]
根据前述或以下实施方案中任一个的另外实施方案在并非不相容的程度上涉及:
一种方法,其中,所述第一环形元件与所述第二环形元件一起包括选自由以下内容构成的组的配置:(i)其中,所述第一环形元件是铁磁材料,并且其中,所述第二环形元件是磁体,(ii)其中,所述第一环形元件是磁体,并且其中,所述第二环形元件是铁磁材料,(iii)其中,所述第一环形元件是铁磁材料,并且其中,所述第二环形元件是海尔贝克阵列,(iv)其中,所述第一环形元件是海尔贝克阵列,并且其中,所述第二环形元件是铁磁材料,以及(v)其中,所述第一环形元件是海尔贝克阵列,并且其中,所述第二环形元件是海尔贝克阵列。
[0124]
根据前述或以下实施方案中任一个的另外实施方案在并非不相容的程度上涉及:一种方法,其中,所述至少一个压缩弹簧中的每一个的净刚度小于所述三元组阵列的有效刚度。
[0125]
根据前述或以下实施方案中任一个的另外实施方案在并非不相容的程度上涉及:一种方法,其中,所述设备是基于飞轮的静电(es)电动机/发电机。
[0126]
已经出于说明和描述的目的呈现了对本技术的以上描述,并且其不旨在是穷尽的或将本技术限制为所公开的精确形式。根据上述示教,许多修改和变化是可能的。所公开的实施例仅意在解释本技术的原理及其实际应用,从而使本领域的其他技术人员能够在各种实施例中最佳地使用本技术,并且具有适合于所设想的特定用途的各种修改。本技术的范围由所附权利要求限定。
[0127]
优选地包括本文描述的所有元件、零件以及步骤。应当理解,如将对本领域技术人员明显的,这些元件、零件以及步骤中的任意一个都可以被其他元件、零件以及步骤替代或完全删除。
[0128]
可能的是,在将本文作为专利进行审查和最终许可时,会根据审查本文的管辖权的要求省略某些文本。在解释本文时,将使用没有删除的原始文本。
[0129]
为了加快许可而进行的修改、变更或表征应被视为在没有任何偏见、放弃声明、免责声明或禁止反言的情况下进行,并且没有没收或向公众奉献最初呈现的任何主题。
[0130]
本文或任何相关文章的审阅者不应合理地推断出对本文最初包含的任何主题的任何免责声明或否认。在此之前或在任何相关的文章中关于任何现有技术或其它方面作出的任何修改、变更、表征或其它声明可被解释为本文原始文章所支持的任何主题的免责声明的范围内,任何这样的免责声明均在此被撤销和撤回。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。