基于前馈补偿模糊pid的功率放大器控制方法及装置
技术领域
1.本发明涉及功率放大器运行技术领域,更具体涉及基于前馈补偿模糊pid的功率放大器控制方法及装置。
背景技术:
2.功率放大器广泛应用在人造太阳中的粒子加速器、医疗方面的核磁共振的梯度电源、高精度的绝缘检测装置中。其中粒子加速器中高速运行的粒子会发生一定的位置偏移,这时候需要外加磁场进行位置矫正,这种外加的磁场要求能够及时响应匹配粒子位置的偏移量并对其进行快速矫正。核磁共振装置则是根据人体不同的部位,产生不同的磁场进行扫描成像,然后提供给医生做医学判断。核磁共振的磁场可达3t,且转换频繁,稳态精度要求高,故需要在短时间内建立稳定快速的电流。
3.在功率放大器控制系统中,快速输出电流是一项重要的指标性能,但是受限于大功率器件的开关损耗,电源的开关频率难以提升,而输出电流的快速性能受到限制。为了实现电压和电流的快速输出,电路中的开关器件控制占空比会突变,但是在电流建立初期,可能会产生超调,使得输出电流超过额定电流值,不利于功率器件的长久运行。同时为了快速建立磁场,输出端电压可能在相邻的工作周期突变巨大,使得输出电流的纹波也增大,对电路的稳定运行产生影响。因此,在快速输出电压和电流的过程中,可能伴随着输出电流产生超调和纹波过大的问题,给功率器件的运行带来巨大的挑战,严重时甚至出现暂时过流现象烧毁功率器件。
4.中国专利公开号cn113114136a,公开了一种基于自适应预测控制的梯度功率放大器及其设计方法,属于电子电路领域。一种基于自适应预测控制的梯度功率放大器装置主要包括四桥臂功率电路和快速反馈预测电路;微处理器根据梯度功率放大器输出的响应曲线,通过调节pid电路中的数字电位器将pid控制参数调至最优,并计算出系统输出响应时间常数τ;微处理器通过调整快速预测电路中的数字电位器阻值实现预测系数与系统输出响应时间常数τ相匹配;然后将快速预测电路与pid电路进行级联,从而实现在不同应用场景下梯度功率放大器的自适应参数匹配,以及对控制电路输出信号的快速预测控制,从而提高梯度功率放大器的输出响应速度和精度。但是其采用传统的pid控制方法,需要多次选取比例积分参数,过程繁琐,前期工程量和计算量较大,同时在快速输出电压和电流的过程中,可能伴随着输出电流产生超调和纹波过大的问题。
技术实现要素:
5.本发明所要解决的技术问题在于传统pid控制方法应用于功率放大器,需要多次选取比例积分参数,过程繁琐,前期工程量和计算量较大,同时在快速输出电压和电流的过程中,可能伴随着输出电流产生超调和纹波过大的问题。
6.本发明通过以下技术手段实现解决上述技术问题的:基于前馈补偿模糊pid的功率放大器控制方法,所述方法包括:
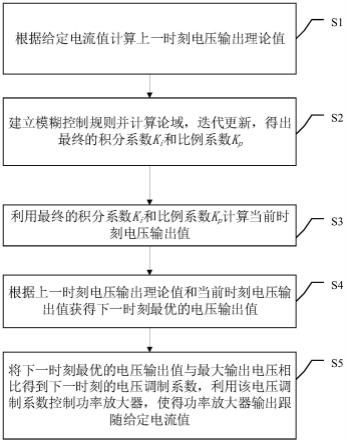
7.步骤一:根据给定电流值计算上一时刻电压输出理论值;
8.步骤二:建立模糊控制规则并计算论域,迭代更新,得出最终的积分系数ki和比例系数k
p
;
9.步骤三:利用最终的积分系数ki和比例系数k
p
计算当前时刻电压输出值;
10.步骤四:根据上一时刻电压输出理论值和当前时刻电压输出值获得下一时刻最优的电压输出值;
11.步骤五:将下一时刻最优的电压输出值与最大输出电压相比得到下一时刻的电压调制系数,利用该电压调制系数控制功率放大器,使得功率放大器输出跟随给定电流值。
12.本发明根据给定电流值计算上一时刻电压输出理论值也即获取前馈补偿,同时建立模糊控制规则并计算论域,迭代更新,得出最终的积分系数ki和比例系数k
p
,并根据上述内容一步一步计算最终得出电压调制系数,利用该电压调制系数控制功率放大器,使得功率放大器输出跟随给定电流值,从而使输出电流的纹波和超调减少,相比于传统的pid控制方法,本发明直接自动更新计算比例积分参数,不需要多次选取比例积分参数,过程简单,减少了前期工程量和计算量。
13.进一步地,所述功率放大器由4个h桥逆变电路级联而成。
14.更进一步地,所述步骤一包括:
15.通过公式建立级联h桥逆变电路输出电压方程,其中,io为输出电流,l为输出负载电感,r为负载电感内阻;
16.在一个开关周期ts内,k时刻将输出电压方程离散化,上一时刻已知的输出电压方程离散化后表示为
[0017][0018]
其中,io(k)为当前时刻输出电流,io(k-1)为上一时刻输出电流,uo(k-1)为上一时刻电压输出理论值。
[0019]
更进一步地,所述步骤二包括:
[0020]
步骤201:根据功率放大器输出电流误差值e和电流误差增量值ec,选定七个模糊子集[nl,nm,ns,zo,ps,pm,pl];
[0021]
步骤202:电流误差值e、电流误差增量值ec、比例系数k
p
、积分系数ki的初始论域分别为e=[-a,a]、ec=[-b,b]、k
p
=[-c,c]、ki=[-d,d],a、b、c、d均为预设的常数;
[0022]
步骤203:建立比例系数k
p
模糊控制规则:根据输出电流误差值e的论域和电流误差增量值ec的论域确定各自所属的模糊子集,根据输出电流误差值e和电流误差增量值ec所属的模糊子集确定比例系数k
p
的调整量δk
p
的所属子集,在比例系数k
p
的调整量δk
p
所属子集及比例系数k
p
的论域的交集中选取比例系数调整量δk
p
,通过公式k
p
(k)=k
p
(k-1) δk
p
计算k时刻的比例系数,其中k
p
(k-1)为上一时刻的比例系数,k
p
(k)为当前时刻的比例系数;
[0023]
建立积分系数ki的模糊控制规则:根据输出电流误差值e的论域和电流误差增量值ec的论域确定各自所属的模糊子集,根据输出电流误差值e和电流误差增量值ec所属的模糊子集确定积分系数ki的调整量δki的所属子集,在积分系数ki的调整量δki所属子集
及积分系数ki的论域的交集中选取积分系数调整量δki,通过公式ki(k)=ki(k-1) δki计算k时刻的积分系数,其中ki(k-1)为上一时刻的积分系数,ki(k)为当前时刻的积分系数;
[0024]
步骤204:通过公式分别得到电流误差值e、电流误差变化率ec、比例系数k
p
、积分系数ki的新论域,返回步骤203,直到达到迭代次数,输出最终的积分系数ki和比例系数k
p
,其中,
[0025]
输入论域的收缩因子其中τ为常数且0《τ《1。
[0026]
输出论域的收缩因子e(ω)为当前采样时刻的误差值,β(0)取1。
[0027]
更进一步地,所述步骤三包括:
[0028]
通过公式计算当前时刻电压输出值,其中,e(k)为当前时刻给定与反馈之间的误差。
[0029]
更进一步地,所述步骤四包括:
[0030]
通过公式u
out
(k)=uo(k-1) u1(k)获得下一时刻最优的电压输出值。
[0031]
更进一步地,所述步骤五包括:
[0032]
将下一时刻最优的电压输出值与最大输出电压相比得到下一时刻的电压调制系数,将电压调制系数与载波幅值相乘得到调制值,调制值再与载波调制比较得到最优的占空比,通过最优占空比来控制级联h桥逆变电路中的开关管,使得功率放大器输出跟随给定信号的电流值。
[0033]
本发明还提供基于前馈补偿模糊pid的功率放大器控制装置,所述装置包括:
[0034]
电压理论值计算模块,用于根据给定电流值计算上一时刻电压输出理论值;
[0035]
pid系数获取模块,用于建立模糊控制规则并计算论域,迭代更新,得出最终的积分系数ki和比例系数k
p
;
[0036]
当前实际电压获取模块,用于利用最终的积分系数ki和比例系数k
p
计算当前时刻电压输出值;
[0037]
下一时刻电压获取模块,用于根据上一时刻电压输出理论值和当前时刻电压输出值获得下一时刻最优的电压输出值;
[0038]
跟踪控制模块,用于将下一时刻最优的电压输出值与最大输出电压相比得到下一时刻的电压调制系数,利用该电压调制系数控制功率放大器,使得功率放大器输出跟随给定电流值。
[0039]
进一步地,所述功率放大器由4个h桥逆变电路级联而成。
[0040]
更进一步地,所述电压理论值计算模块还用于:
[0041]
通过公式建立级联h桥逆变电路输出电压方程,其中,io为输出电流,
l为输出负载电感,r为负载电感内阻;
[0042]
在一个开关周期ts内,k时刻将输出电压方程离散化,上一时刻已知的输出电压方程离散化后表示为
[0043][0044]
其中,io(k)为当前时刻输出电流,io(k-1)为上一时刻输出电流,uo(k-1)为上一时刻电压输出理论值。
[0045]
更进一步地,所述pid系数获取模块还用于:
[0046]
步骤201:根据功率放大器输出电流误差值e和电流误差增量值ec,选定七个模糊子集[nl,nm,ns,zo,ps,pm,pl];
[0047]
步骤202:电流误差值e、电流误差增量值ec、比例系数k
p
、积分系数ki的初始论域分别为e=[-a,a]、ec=[-b,b]、k
p
=[-c,c]、ki=[-d,d],a、b、c、d均为预设的常数;
[0048]
步骤203:建立比例系数k
p
模糊控制规则:根据输出电流误差值e的论域和电流误差增量值ec的论域确定各自所属的模糊子集,根据输出电流误差值e和电流误差增量值ec所属的模糊子集确定比例系数k
p
的调整量δk
p
的所属子集,在比例系数k
p
的调整量δk
p
所属子集及比例系数k
p
的论域的交集中选取比例系数调整量δk
p
,通过公式k
p
(k)=k
p
(k-1) δk
p
计算k时刻的比例系数,其中k
p
(k-1)为上一时刻的比例系数,k
p
(k)为当前时刻的比例系数;
[0049]
建立积分系数ki的模糊控制规则:根据输出电流误差值e的论域和电流误差增量值ec的论域确定各自所属的模糊子集,根据输出电流误差值e和电流误差增量值ec所属的模糊子集确定积分系数ki的调整量δki的所属子集,在积分系数ki的调整量δki所属子集及积分系数ki的论域的交集中选取积分系数调整量δki,通过公式ki(k)=ki(k-1) δki计算k时刻的积分系数,其中ki(k-1)为上一时刻的积分系数,ki(k)为当前时刻的积分系数;
[0050]
步骤204:通过公式分别得到电流误差值e、电流误差变化率ec、比例系数k
p
、积分系数ki的新论域,返回步骤203,直到达到迭代次数,输出最终的积分系数ki和比例系数k
p
,其中,
[0051]
输入论域的收缩因子其中τ为常数且0《τ《1。
[0052]
输出论域的收缩因子e(ω)为当前采样时刻的误差值,β(0)取1。
[0053]
更进一步地,所述当前实际电压获取模块还用于:
[0054]
通过公式计算当前时刻电压输出值,其中,e(k)为当前时刻给定与反馈之间的误差。
[0055]
更进一步地,所述下一时刻电压获取模块还用于:
[0056]
通过公式u
out
(k)=uo(k-1) u1(k)获得下一时刻最优的电压输出值。
[0057]
更进一步地,所述跟踪控制模块还用于:
[0058]
将下一时刻最优的电压输出值与最大输出电压相比得到下一时刻的电压调制系数,将电压调制系数与载波幅值相乘得到调制值,调制值再与载波调制比较得到最优的占空比,通过最优占空比来控制级联h桥逆变电路中的开关管,使得功率放大器输出跟随给定信号的电流值。
[0059]
本发明的优点在于:本发明根据给定电流值计算上一时刻电压输出理论值也即获取前馈补偿,同时建立模糊控制规则并计算论域,迭代更新,得出最终的积分系数ki和比例系数k
p
,并根据上述内容一步一步计算最终得出电压调制系数,利用该电压调制系数控制功率放大器,使得功率放大器输出跟随给定电流值,从而使输出电流的纹波和超调减少,相比于传统的pid控制方法,本发明直接自动更新计算比例积分参数,不需要多次选取比例积分参数,过程简单,减少了前期工程量和计算量。
附图说明
[0060]
图1为本发明实施例1所提供的基于前馈补偿模糊pid的功率放大器控制方法的流程图;
[0061]
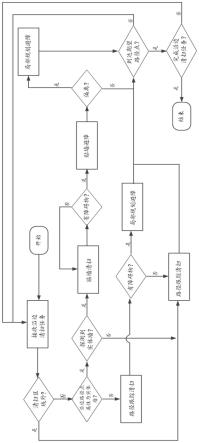
图2为本发明实施例1所提供的基于前馈补偿模糊pid的功率放大器控制方法中功率放大器的总体控制框图;
[0062]
图3为本发明实施例1所提供的基于前馈补偿模糊pid的功率放大器控制方法中功率放大器输出电流波形和给定电流波形示意图。
具体实施方式
[0063]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0064]
实施例1
[0065]
如图1所示,本发明提供基于前馈补偿模糊pid的功率放大器控制方法,其中,功率放大器的总体控制框图如图2所示,功率放大器由四个逆变h桥级联而成;本发明基本思想是根据给定电流的采样建立数学模型。根据采样电流与给定电流的误差和误差变化率确定论域和比例积分参数。使得输出电流快速跟随参考信号,同时输出电流具有较小的纹波;利用模糊pid的算法避免了人为求解析解的过程,同时增加了电流的控制范围;将前馈补偿值与模糊pid计算的结果相加,与
±
2400v比较得到电压系数,电压系数再与载波幅值相乘后与45
°
移相控制的载波调制得到占空比,实现输出电流的精准控制。以下详细介绍方法过程,所述方法包括:
[0066]
s1:根据给定电流值计算上一时刻电压输出理论值;具体过程为:
[0067]
建立级联h桥逆变电路输出电压方程,输出电压方程跟输出电流io,输出负载电感l,负载电感内阻r相关,输出电压方程可表示为
[0068][0069]
进一步地,在一个开关周期ts内,k时刻将输出电压方程离散化,上一时刻已知的输出电压方程离散化后可表示为
[0070][0071]
s2:建立模糊控制规则并计算论域,迭代更新,得出最终的积分系数ki和比例系数k
p
;具体过程为:
[0072]
步骤201:根据功率放大器输出电流误差值e和电流误差增量值ec,选定七个模糊子集[nl,nm,ns,zo,ps,pm,pl];
[0073]
步骤202:电流误差值e、电流误差增量值ec、比例系数k
p
、积分系数ki的初始论域分别为e=[-a,a]、ec=[-b,b]、k
p
=[-c,c]、ki=[-d,d],a、b、c、d均为预设的常数;
[0074]
步骤203::建立比例系数k
p
模糊控制规则:根据输出电流误差值e的论域和电流误差增量值ec的论域确定各自所属的模糊子集,根据输出电流误差值e和电流误差增量值ec所属的模糊子集确定比例系数k
p
的调整量δk
p
的所属子集,在比例系数k
p
的调整量δk
p
所属子集及比例系数k
p
的论域的交集中选取比例系数调整量δk
p
,通过公式k
p
(k)=k
p
(k-1) δk
p
计算k时刻的比例系数,其中k
p
(k-1)为上一时刻的比例系数,k
p
(k)为当前时刻的比例系数;如下表1所示,输出电流误差值e属于模糊子集nl,电流误差增量值ec属于模糊子集nl的情况下,比例系数k
p
调整量δk
p
从模糊子集pl中选取,但是选取过程还需注意不能超出比例系数k
p
的论域。
[0075]
表1比例系数k
p
的模糊控制规则表
[0076][0077]
建立积分系数ki的模糊控制规则:建立积分系数ki的模糊控制规则:根据输出电流误差值e的论域和电流误差增量值ec的论域确定各自所属的模糊子集,根据输出电流误差值e和电流误差增量值ec所属的模糊子集确定积分系数ki的调整量δki的所属子集,在积分系数ki的调整量δki所属子集及积分系数ki的论域的交集中选取积分系数调整量δki,通过公式ki(k)=ki(k-1) δki计算k时刻的积分系数,其中ki(k-1)为上一时刻的积分系数,ki(k)为当前时刻的积分系数;如下表2所示,输出电流误差值e属于模糊子集nl,电流误差增量值ec属于模糊子集nl的情况下,积分系数ki调整量δki从模糊子集nl中选取,但是选取过程还需注意不能超出积分系数ki的论域。
[0078]
表2积分系数ki的模糊控制规则表
[0079][0080]
步骤204:
[0081]
设置输入论域的收缩因子
[0082]
其中τ为常数且0《τ《1,e为上述提到的误差值;
[0083]
设置输出论域的收缩因子
[0084]
其中,e(ω)为给定与反馈之间的误差。β(0)可根据实际情况选取,一般写1。
[0085]
通过公式
[0086]
分别得到电流误差值e、电流误差变化率ec、比例系数k
p
、积分系数ki的新论域,返回步骤203,直到达到迭代次数,输出最终的积分系数ki和比例系数k
p
。
[0087]
s3:利用最终的积分系数ki和比例系数k
p
计算当前时刻电压输出值;具体过程为:
[0088]
通过公式
[0089]
计算当前时刻电压输出值,其中,e(k)为当前时刻给定与反馈之间的误差,e(ω)为给定与反馈之间的误差。
[0090]
s4:根据上一时刻电压输出理论值和当前时刻电压输出值获得下一时刻最优的电压输出值;具体过程为:
[0091]
磁体电源功率放大器地输出电流目标是快速准确地将给定电流进行无差别地进行放大,因此根据模糊pid计算与上述理论结果即可得到最优下一时刻地电压输出量
[0092]uout
(k)=uo(k-1) u1(k)
ꢀꢀ
(7)
[0093]
s5:将下一时刻最优的电压输出值与最大输出电压相比得到下一时刻的电压调制系数,利用该电压调制系数控制功率放大器,使得功率放大器输出跟随给定电流值;具体过程为:该系统是由4个h桥级联而成,输出电压最大值为
±
2400v,将上述得到的电压输出量u
out
与最大输出电压相比即可得到下一时刻地电压调制系数;将电压调制系数与载波幅值相乘得到调制值,调制值再与载波调制比较得到最优的占空比,通过最优占空比来控制级联h桥逆变电路中的开关管,使得功率放大器快速准确地输出跟随给定信号的电流值。
[0094]
以下进行进行仿真分析,仿真参数:直流供电电压为510v,电感l值为400uh,电感内阻r值为0.1ω,三角载波频率为25khz,选择45
°
载波移相方式进行移相控制。综合前馈控制与变论域模糊pid的方法得到当前时刻电压输出值,通过载波调制输出最优占空比对功
率放大器进行控制,图3为本发明中功率放大器电源输出电流波形和给定电流波形,从图3可以看出,功率放大器的输出电流波形能够准确地跟随给定电流波形。
[0095]
通过以上技术方案,本发明根据给定电流值计算上一时刻电压输出理论值也即获取前馈补偿,同时建立模糊控制规则并计算论域,迭代更新,得出最终的积分系数ki和比例系数k
p
,并根据上述内容一步一步计算最终得出电压调制系数,利用该电压调制系数控制功率放大器,使得功率放大器输出跟随给定电流值,从而使输出电流的纹波和超调减少,相比于传统的pid控制方法,本发明直接自动更新计算比例积分参数,不需要多次选取比例积分参数,过程简单,减少了前期工程量和计算量。
[0096]
实施例2
[0097]
基于实施例1,本发明实施例2还提供基于前馈补偿模糊pid的功率放大器控制装置,所述装置包括:
[0098]
电压理论值计算模块,用于根据给定电流值计算上一时刻电压输出理论值;
[0099]
pid系数获取模块,用于建立模糊控制规则并计算论域,迭代更新,得出最终的积分系数ki和比例系数k
p
;
[0100]
当前实际电压获取模块,用于利用最终的积分系数ki和比例系数k
p
计算当前时刻电压输出值;
[0101]
下一时刻电压获取模块,用于根据上一时刻电压输出理论值和当前时刻电压输出值获得下一时刻最优的电压输出值;
[0102]
跟踪控制模块,用于将下一时刻最优的电压输出值与最大输出电压相比得到下一时刻的电压调制系数,利用该电压调制系数控制功率放大器,使得功率放大器输出跟随给定电流值。
[0103]
具体的,所述功率放大器由4个h桥逆变电路级联而成。
[0104]
更具体的,所述电压理论值计算模块还用于:
[0105]
通过公式建立级联h桥逆变电路输出电压方程,其中,io为输出电流,l为输出负载电感,r为负载电感内阻;
[0106]
在一个开关周期ts内,k时刻将输出电压方程离散化,上一时刻已知的输出电压方程离散化后表示为
[0107][0108]
其中,io(k)为当前时刻输出电流,io(k-1)为上一时刻输出电流,uo(k-1)为上一时刻电压输出理论值。
[0109]
更具体的,所述pid系数获取模块还用于:
[0110]
步骤201:根据功率放大器输出电流误差值e和电流误差增量值ec,选定七个模糊子集[nl,nm,ns,zo,ps,pm,pl];
[0111]
步骤202:电流误差值e、电流误差增量值ec、比例系数k
p
、积分系数ki的初始论域分别为e=[-a,a]、ec=[-b,b]、k
p
=[-c,c]、ki=[-d,d],a、b、c、d均为预设的常数;
[0112]
步骤203:建立比例系数k
p
模糊控制规则:根据输出电流误差值e的论域和电流误差增量值ec的论域确定各自所属的模糊子集,根据输出电流误差值e和电流误差增量值ec
所属的模糊子集确定比例系数k
p
的调整量δk
p
的所属子集,在比例系数k
p
的调整量δk
p
所属子集及比例系数k
p
的论域的交集中选取比例系数调整量δk
p
,通过公式k
p
(k)=k
p
(k-1) δk
p
计算k时刻的比例系数,其中k
p
(k-1)为上一时刻的比例系数,k
p
(k)为当前时刻的比例系数;
[0113]
建立积分系数ki的模糊控制规则:根据输出电流误差值e的论域和电流误差增量值ec的论域确定各自所属的模糊子集,根据输出电流误差值e和电流误差增量值ec所属的模糊子集确定积分系数ki的调整量δki的所属子集,在积分系数ki的调整量δki所属子集及积分系数ki的论域的交集中选取积分系数调整量δki,通过公式ki(k)=ki(k-1) δki计算k时刻的积分系数,其中ki(k-1)为上一时刻的积分系数,ki(k)为当前时刻的积分系数;
[0114]
步骤204:通过公式分别得到电流误差值e、电流误差变化率ec、比例系数k
p
、积分系数ki的新论域,返回步骤203,直到达到迭代次数,输出最终的积分系数ki和比例系数k
p
,其中,
[0115]
输入论域的收缩因子其中τ为常数且0《τ《1,e为上述提到的误差值;
[0116]
输出论域的收缩因子e(ω)为当前采样时刻的误差值,β(0)取1。
[0117]
更具体的,所述当前实际电压获取模块还用于:
[0118]
通过公式计算当前时刻电压输出值,其中,e(k)为给定与反馈之间的误差,e(ω)为给定与反馈之间的误差。
[0119]
更具体的,所述下一时刻电压获取模块还用于:
[0120]
通过公式u
out
(k)=uo(k-1) u1(k)获得下一时刻最优的电压输出值。
[0121]
更具体的,所述跟踪控制模块还用于:
[0122]
将下一时刻最优的电压输出值与最大输出电压相比得到下一时刻的电压调制系数,将电压调制系数与载波幅值相乘得到调制值,调制值再与载波调制比较得到最优的占空比,通过最优占空比来控制级联h桥逆变电路中的开关管,使得功率放大器输出跟随给定信号的电流值。
[0123]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。