技术特征:
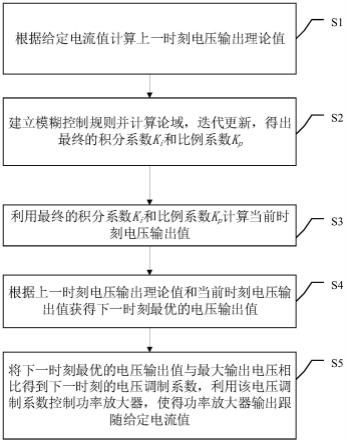
1.基于前馈补偿模糊pid的功率放大器控制方法,其特征在于,所述方法包括:步骤一:根据给定电流值计算上一时刻电压输出理论值;步骤二:建立模糊控制规则并计算论域,迭代更新,得出最终的积分系数k
i
和比例系数k
p
;步骤三:利用最终的积分系数k
i
和比例系数k
p
计算当前时刻电压输出值;步骤四:根据上一时刻电压输出理论值和当前时刻电压输出值获得下一时刻最优的电压输出值;步骤五:将下一时刻最优的电压输出值与最大输出电压相比得到下一时刻的电压调制系数,利用该电压调制系数控制功率放大器,使得功率放大器输出跟随给定电流值。2.根据权利要求1所述的基于前馈补偿模糊pid的功率放大器控制方法,其特征在于,所述功率放大器由4个h桥逆变电路级联而成。3.根据权利要求2所述的基于前馈补偿模糊pid的功率放大器控制方法,其特征在于,所述步骤一包括:通过公式建立级联h桥逆变电路输出电压方程,其中,i
o
为输出电流,l为输出负载电感,r为负载电感内阻;在一个开关周期t
s
内,k时刻将输出电压方程离散化,上一时刻已知的输出电压方程离散化后表示为其中,i
o
(k)为当前时刻输出电流,i
o
(k-1)为上一时刻输出电流,u
o
(k-1)为上一时刻电压输出理论值。4.根据权利要求3所述的基于前馈补偿模糊pid的功率放大器控制方法,其特征在于,所述步骤二包括:步骤201:根据功率放大器输出电流误差值e和电流误差增量值ec,选定七个模糊子集[nl,nm,ns,zo,ps,pm,pl];步骤202:电流误差值e、电流误差增量值ec、比例系数k
p
、积分系数k
i
的初始论域分别为e=[-a,a]、ec=[-b,b]、k
p
=[-c,c]、k
i
=[-d,d],a、b、c、d均为预设的常数;步骤203:建立比例系数k
p
模糊控制规则:根据输出电流误差值e的论域和电流误差增量值ec的论域确定各自所属的模糊子集,根据输出电流误差值e和电流误差增量值ec所属的模糊子集确定比例系数k
p
的调整量δk
p
的所属子集,在比例系数k
p
的调整量δk
p
所属子集及比例系数k
p
的论域的交集中选取比例系数调整量δk
p
,通过公式k
p
(k)=k
p
(k-1) δk
p
计算k时刻的比例系数,其中k
p
(k-1)为上一时刻的比例系数,k
p
(k)为当前时刻的比例系数;建立积分系数k
i
的模糊控制规则:根据输出电流误差值e的论域和电流误差增量值ec的论域确定各自所属的模糊子集,根据输出电流误差值e和电流误差增量值ec所属的模糊子集确定积分系数k
i
的调整量δk
i
的所属子集,在积分系数k
i
的调整量δk
i
所属子集及积分系数k
i
的论域的交集中选取积分系数调整量δk
i
,通过公式k
i
(k)=k
i
(k-1) δk
i
计算k时刻的积分系数,其中k
i
(k-1)为上一时刻的积分系数,k
i
(k)为当前时刻的积分系数;
步骤204:通过公式分别得到电流误差值e、电流误差变化率ec、比例系数k
p
、积分系数k
i
的新论域,返回步骤203,直到达到迭代次数,输出最终的积分系数k
i
和比例系数k
p
,其中,输入论域的收缩因子其中τ为常数且0<τ<1;输出论域的收缩因子e(ω)为当前采样时刻的误差值,β(0)取1。5.根据权利要求4所述的基于前馈补偿模糊pid的功率放大器控制方法,其特征在于,所述步骤三包括:通过公式计算当前时刻电压输出值,其中,e(k)为当前时刻给定与反馈之间的误差。6.根据权利要求5所述的基于前馈补偿模糊pid的功率放大器控制方法,其特征在于,所述步骤四包括:通过公式u
out
(k)=u
o
(k-1) u1(k)获得下一时刻最优的电压输出值。7.根据权利要求6所述的基于前馈补偿模糊pid的功率放大器控制方法,其特征在于,所述步骤五包括:将下一时刻最优的电压输出值与最大输出电压相比得到下一时刻的电压调制系数,将电压调制系数与载波幅值相乘得到调制值,调制值再与载波调制比较得到最优的占空比,通过最优占空比来控制级联h桥逆变电路中的开关管,使得功率放大器输出跟随给定信号的电流值。8.基于前馈补偿模糊pid的功率放大器控制装置,其特征在于,所述装置包括:电压理论值计算模块,用于根据给定电流值计算上一时刻电压输出理论值;pid系数获取模块,用于建立模糊控制规则并计算论域,迭代更新,得出最终的积分系数k
i
和比例系数k
p
;当前实际电压获取模块,用于利用最终的积分系数k
i
和比例系数k
p
计算当前时刻电压输出值;下一时刻电压获取模块,用于根据上一时刻电压输出理论值和当前时刻电压输出值获得下一时刻最优的电压输出值;跟踪控制模块,用于将下一时刻最优的电压输出值与最大输出电压相比得到下一时刻的电压调制系数,利用该电压调制系数控制功率放大器,使得功率放大器输出跟随给定电流值。9.根据权利要求8所述的基于前馈补偿模糊pid的功率放大器控制装置,其特征在于,所述功率放大器由4个h桥逆变电路级联而成。10.根据权利要求9所述的基于前馈补偿模糊pid的功率放大器控制装置,其特征在于,
所述电压理论值计算模块还用于:通过公式建立级联h桥逆变电路输出电压方程,其中,i
o
为输出电流,l为输出负载电感,r为负载电感内阻;在一个开关周期t
s
内,k时刻将输出电压方程离散化,上一时刻已知的输出电压方程离散化后表示为其中,i
o
(k)为当前时刻输出电流,i
o
(k-1)为上一时刻输出电流,u
o
(k-1)为上一时刻电压输出理论值。
技术总结
本发明公开了基于前馈补偿模糊PID的功率放大器控制方法及装置,所述方法包括:根据给定电流值计算上一时刻电压输出理论值;建立模糊控制规则并计算论域,迭代更新,得出最终的积分系数K
技术研发人员:黄海宏 何晨 王海欣
受保护的技术使用者:合肥工业大学
技术研发日:2022.06.30
技术公布日:2022/8/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。