1.本发明涉及计算机视觉技术领域和干涉测量技术领域,特别是涉及一种干涉条纹移动量检测方法。
背景技术:
2.近年来,随着国家工业化的迅速发展,生产生活等对煤炭的需求也与日俱增,我国仍然是煤炭的开采与消费大国。甲烷,俗称瓦斯,尤其爆炸引起的煤矿灾难对我国煤矿的安全生产造成了很大的威胁。而我国目前现有的煤矿均为瓦斯矿井,据统计在100个国有重点煤矿生产企业的609处矿井中,高瓦斯经占26.8%,瓦斯与煤突出矿井占17.6%,低瓦斯矿井占55.6%,煤矿生产中甲烷的最大危害在于与空气混合发生爆炸。瓦斯爆炸不仅会造成大量人员伤亡,而且严重摧毁井巷设施,致使生产中断,有时还会引起煤尘爆炸、矿井火灾、井巷垮塌等二次灾害,给国家带来了巨大的人员伤亡和财产损失。
3.煤矿生产中对甲烷浓度进行精确检测和监控,以确保煤矿的安全生产和矿工的安全。使用仪器准确检测出甲烷气体的浓度,工作人员就可以提前知晓矿井中瓦斯气体的浓度,一旦发现浓度超限,就能及时采取有效的措施应对,减少生产中的安全隐患,降低事故发生的可能性。在矿井作业中,对于甲烷气体积聚,利用实时、可靠、低廉、安全的仪器对其进行及时、准确的检测至关重要,也是保障生产生活安全的必要措施。
4.由于甲烷气体是一种很难直接检测的气体,所以根据其物理化学特性衍生出一些浓度检测的方法,主要分为光学方法和非光学方法两种。非光学方法主要利用甲烷气体分子之间的作用来进行测量,其主要包括:催化燃烧法、半导体气敏法、化学分析法、气相色谱法。但是这几种方法精度低、寿命短、测量范围窄。近年来广泛应用的是光学方法,光学方法利用光在甲烷气体中的光学特性与气溶胶浓度之间的关系进行测量,主要有光谱吸收法和光干涉法。其中,光干涉法是目前普遍采用的利用光干涉原理的一种物理方法,这种方法克服了非光学方法的不足,具有测量精度高、响应速度快等优点,成为煤矿井下气体检测仪的可靠技术载体,根据光干涉原理制成的甲烷干涉仪也被广泛应用。
技术实现要素:
5.本发明的目的是克服现有技术的不足而提出一种可实时监控的干涉条纹移动量检测系统,利用干涉条纹距离的实时监控,实现了对示踪粒子的角点追踪。
6.本发明利用以下的技术方案来实现:
7.一种可实时监控的干涉条纹移动量检测系统,该系统包括干涉装置模块、硬件图像采集模块以及图像实时处理模块,其中:
8.所述干涉装置用于产生干涉条纹;
9.所述硬件图像采集模块用于采集干涉条纹视频图像信息;
10.所述图像实时处理模块用于对所采集的干涉条纹视频图像信息进行实时处理,具体包括:采用lk光流法获得特征点来实现两帧图像的匹配,利用steger算法提取视频序列
的连续两帧的中心线;对每一帧图像进行角点检测,获取角点在图像像素坐标系中的像素坐标,作为lk光流法的输入;利用lk光流法通过对两帧图像之间的特征点匹配,计算光流值,从而得到干涉条纹距离,实现对示踪粒子的角点追踪。
11.所述干涉条纹产生装置包括光源、平面棱镜、补充棱镜、待测气室、空气室、第一三角反射棱镜、第二三角反射棱镜、凸透镜和目镜。
12.所述图像实时处理模块具体包括以下处理:
13.步骤1、对所采集的干涉条纹图像进行预处理和去噪;由于受到拍摄环境的影响,条纹需要进行预处理;
14.步骤2、采用steger算法对干涉条纹图像提取中心线,取视频序列的连续两帧分别获取中心线,所使用的图片经过中心线提取后检测出三条中心线;
15.hessian矩阵表示,如下式所示:
[0016][0017]
其中,g(x,y)为二维高斯函数,i(x,y)为图像中点(x,y)的灰度值;;
[0018]
通过hessian矩阵求出条纹法线的单位向量,对条纹截面灰度分布函数通过二阶泰勒展开,求解出条纹中心线的精确位置;
[0019]
步骤3、从干涉条纹图像中提取出角点;
[0020]
设图像中点(x,y)的灰度值为i(x,y),以该点为中心建立窗口w,将窗口平移(δx,δy)产生灰度变化e(δx,δy),如下式所示:
[0021][0022]
其中,w(x,y)表示窗口权重,i(x δx,y δy)为发生窗口平移(δx,δy)后的图像中点;将发生窗口平移(δx,δy)后的图像中点i(x δx,y δy)进行泰勒展开,如下式所示:
[0023][0024]
其中,i
x
、iy为像素点灰度值的一阶微分,m为自相关矩阵求;
[0025]
对自相关矩阵m求特征值,若其中较小的特征值大于预先设定阈值,则得到强角点;
[0026]
步骤4、利用lk光流法通过对两帧图像之间的特征点匹配,计算光流值,从而得到干涉条纹距离,实现对示踪粒子的角点追踪;
[0027]
图像约束方程如下式所示:
[0028]
i(x,y,t)=i(x dx,y dy,t dt)
ꢀꢀ
(4)
[0029]
其中,i(x,y,t)表示t时刻像素点(x,y)的灰度;
[0030]
对图像约束方程使用泰勒公式,求解水平和垂直方向的光流速度,如下式所示:
[0031]
r=(a
t
w2a)-1at
w2b
ꢀꢀ
(5)
[0032]
其中,a为各个像素点1,2,...,n灰度值的矩阵,r为光流值的矩阵,a
t
为矩阵a的装置矩阵,b为t时刻各个像素点1,2,...,n亮度的矩阵,w2为窗口权重函数;
[0033]
计算光流域,如下式所示:
[0034][0035]
其中,i
t
为t时刻的亮度,u、v为水平和垂直方向的光流值;
[0036]
通过第一帧图像与当前帧的光流值积分得到干涉条纹的移动距离。
[0037]
所述图像实时处理模块采用stm32开发板以及arm处理器来实现。
[0038]
相较于传统的光流法和模板匹配法有较高的精度,本发明的一种可实时监控的干涉条纹移动量检测系统(一种基于opencv平台的动态测量系统)在利用干涉条纹移动量实时测量进而实现甲烷气体浓度测量方面具有运算简便、精度高的特点。
附图说明
[0039]
图1为本发明的一种可实时监控的干涉条纹移动量检测系统硬件模块示意图;
[0040]
图2为本发明的一种可实时监控的干涉条纹移动量检测系统的图像实时处理模块流程图;
[0041]
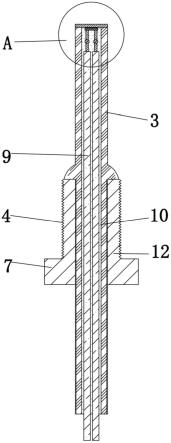
图3为干涉条纹产生装置(即雅满干涉仪)实施例示意图;
[0042]
图4为提取结果示意图,(a)干涉条纹图,(b)中心线提取结果;
[0043]
附图标记:
[0044]
100、干涉装置模块,200、硬件图像采集模块,300、图像实时处理模块;
[0045]
1、光源,2、平面棱镜,3、补充棱镜,4、待测气室,5、空气室,6、第一三角反射棱镜,7、第二三角反射棱镜,8、凸透镜,9、目镜。
具体实施方式
[0046]
以下结合附图和具体实施例对本发明的技术方案进行详细说明。
[0047]
如图1所示,为本发明的一种可实时监控的干涉条纹移动量检测系统,该系统包括干涉装置模块100、硬件图像采集模块200以及图像实时处理模块300。
[0048]
其中:
[0049]
所述干涉装置100,用于产生干涉条纹,本发明利用了干涉条纹的以下特性:当持续向待测气室吸入外界含有甲烷的空气时,干涉条纹会随甲烷浓度的增加而不断移动,直到和外界浓度平衡时,条纹才会静止下来。优选的,所述干涉装置100采用雅满干涉仪来实现。
[0050]
所述硬件图像采集模块200,用于在干涉装置100产生干涉条纹后,替代目视测量方法来记录一段干涉条纹视频图像信息。优选的,所述硬件图像采集模块200采用cmos(complementary metal oxide semiconductor)图像传感器来实现。
[0051]
所述图像实时处理模块300,用于对所采集的干涉条纹视频图像信息进行实时处理,即进行所采集的视频图像信息的实时处理具体包括:采用lk光流法获得特征点来实现两帧图像的匹配。干涉条纹则是明暗交替的条纹,明暗条纹之间的灰度值由高到低过渡,每
条亮暗纹之间灰度值相近,如果直接对条纹进行光流计算,难以寻找特征点。为此为了减小误差,使实验结果更加精确,采用了steger算法提取中心线。取视频序列的连续两帧分别获取中心线。所使用的图片经过中心线提取后检测出三条中心线。lk光流法通过对两帧图像之间的特征点匹配来计算条纹移动距离,在计算前提取出图像中的角点,作为光流法的输入,实现对示踪粒子的角点追踪。实验结果表明,光流追踪法的效果更好,能够减小噪声对结果的影响,精确度高,运算速度快,相对于传统的位移检测方法,能够达到实时测量的要求。优选的,所述图像实时处理模块300采用stm32开发板以及arm(acorn risc machine)处理器来实现。结合实例对所述图像实时处理模块300的实施过程说明如下:
[0052]
使用matlab使一张干涉条纹图片产生向上移动n个像素点的运动,获取10幅连续移动的图像序列,以模拟干涉条纹的移动过程,这样能够获取准确的移动距离作为测试信号,以便实验的有效进行。
[0053]
在visual studio2015的opencv库采用imread函数循环读入每一张提取中心线的图像,采用goodfeaturestotrack函数对每一帧图像进行角点检测,获取角点在图像像素坐标系中的像素坐标,然后存入point2f类型的二维动态数组中。
[0054]
通过calcopticalflowpyrlk函数实现前后两帧图像的匹配,将前后两帧的特征点连接,绘制出光流轨迹,每进行一次匹配,检测一次角点,每次将新一帧图像角点放于vector容器中。计算得到光流值。
[0055]
如图2所示,为图像实时处理模块流程图。该流程包括以下步骤:
[0056]
步骤1、对所采集的干涉条纹图像进行预处理和去噪;由于受到拍摄环境的影响,条纹需要进行预处理;
[0057]
步骤2、采用steger算法对干涉条纹图像提取中心线,取视频序列的连续两帧分别获取中心线,所使用的图片经过中心线提取后检测出三条中心线;
[0058]
steger算法的核心思想是利用hessian矩阵来计算特征值和向量,得到中心条纹的法线方向,利用泰勒级数展开得到条纹截面的中心亚像素点。
[0059]
hessian矩阵表示,如下式所示:
[0060][0061]
其中,g(x,y)为二维高斯函数,i(x,y)为图像中点(x,y)的灰度值;
[0062]
通过hessian矩阵求出条纹法线的单位向量,对条纹截面灰度分布函数通过二阶泰勒展开,求解出条纹中心线的精确位置;
[0063]
步骤3、从干涉条纹图像中提取出角点;
[0064]
shi-tomasi角点提取算法是harris角点提取算法的改进.设图像中点(x,y)的灰度值为i(x,y),以该点为中心建立窗口w,将窗口平移(δx,δy)产生灰度变化e(δx,δy),如下式所示:
[0065]
[0066]
其中,w(x,y)表示窗口权重,i(x δx,y δy)为发生窗口平移(δx,δy)后的图像中点;将发生窗口平移(δx,δy)后的图像中点i(x δx,y δy)进行泰勒展开,如下式所示:
[0067][0068]
其中,i
x
、iy为像素点(x,y)灰度值的一阶微分,m为自相关矩阵;
[0069]
将式(2)代入式(1)中化简,得到2
×
2矩阵:
[0070]
对自相关矩阵m求特征值,若其中较小的特征值大于预先设定阈值,则得到强角点;
[0071]
步骤4、利用lk光流法通过对两帧图像之间的特征点匹配,计算光流值,从而得到干涉条纹距离,实现对示踪粒子的角点追踪。
[0072]
图像约束方程如下式所示:
[0073]
i(x,y,t)=i(x dx,y dy,t dt)
ꢀꢀ
(4)
[0074]
其中,i(x,y,t)表示t时刻像素点(x,y)的灰度;
[0075]
对图像约束方程使用泰勒公式,求解水平和垂直方向的光流速度,如下式所示:
[0076]
r=(a
t
w2a)-1at
w2b
ꢀꢀ
(5)
[0077][0078]
其中,a为各个像素点1,2,...,n灰度值的矩阵,r为光流值的矩阵,a
t
为矩阵a的装置矩阵,b为t时刻各个像素点1,2,...,n亮度的矩阵,w2为窗口权重函数;
[0079]
假设像素流在大小为m
×
m(m<1)的范围内一致,普通的最小二乘法解是指窗口内的n个像素的光流值一样,但是随着各点光流与中心点距离的增加,光流偏差会有所增加,所以设w2为一个窗口权重函数,该函数使窗口中心点的加权比周围大,得到加权版本。
[0080]
计算光流值,如下式所示:
[0081][0082]
其中,i
t
为t时刻的亮度,u、v为水平和垂直方向的光流值;
[0083]
通过第一帧图像与当前帧的光流值积分得到干涉条纹的移动距离。
[0084]
如图3所示,为干涉条纹产生装置结构示意图。该装置包括光源1、平面棱镜2、补充棱镜3、待测气室4、空气室5、第一三角反射棱镜6、第二三角反射棱镜7、凸透镜8、目镜9。光干涉式甲烷测定器是利用干涉条纹移动量与甲烷浓度之间存在明显的线性关系来检测井下甲烷浓度。本发明采用的雅满干涉仪结构,光源1发射的光束l1在平面棱镜2的前后表面发生反射,产生光强相等的两束光l2和l3,两束光分别穿过不同的气室,l2穿过空气室5,l3穿过待测气体室4;穿过气室5的两束光在第一三角反射棱镜6的直角边上发生两次反射后形成光线l4和l5,l4通过待测气体室4返回,l5通过空气室5返回;两束光线穿过补偿棱镜3
后,在平面棱镜2的作用下汇聚成光线l6,;当个两束光线l4、l5存在光程差时,将会形成干涉条纹,由成像系统进行数据处理。当待测气室4充入不同浓度的甲烷,光程差发生变化,条纹会向垂直方向移动。
[0085]
当持续向待测气室吸入外界含有甲烷的空气时,干涉条纹会随甲烷浓度的增加而不断移动,直到和外界浓度平衡时,条纹才会静止下来。当前的操作流程是用目视的方法读取平衡状态下的条纹移动量以获取待测空间的甲烷浓度。当引入cmos图像传感器和arm处理器替代目视测量方法后,条纹开始移动直至稳定静止之前这一段的视频信息被记录并实时处理,光源的出射光进行平面棱镜,气体进气口处由气球辅助吸入待测气体,条纹观测口处放置cmos图像传感器,进行干涉条纹图像的拍摄工作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。