1.本实用新型涉及一种用于提拉臂运动控制的联动锁紧机构,属于机械锁紧控制技术领域,特别适用于提拉臂式装载车的运动控制。
背景技术:
2.随着近年来以垃圾转运车为代表的提拉臂机构运用的越来越普遍,提拉臂机构运动控制方式变得越来越重要。整个提拉臂机构在提拉装载过程中,由于各运动组件之间的自由度大于1,为保证运动可靠,传统方法是将回转臂在整个过程中一直锁死,该方法控制简单,但同时有以下缺点:
3.1、全程锁死回转臂后,在拉臂回转至大角度时,对起竖缸输出力要求特别高,各结构受力工况恶劣;
4.2、由于整个机构运动时只有一个回转点,对起竖缸行程要求很高。
5.因为以上原因,现如今大负载式的提拉臂机构均在提拉装载过程中对回转臂进行了控制,在进行提拉装载时,拉臂与回转臂均需要运动,且运动轨迹需要进行控制,但目前控制方式各不相同且处于保密状态。
技术实现要素:
6.为解决上述技术问题,本实用新型提供了一种用于提拉臂运动控制的联动锁紧机构,该用于提拉臂运动控制的联动锁紧机构可满足提拉臂式结构省力省空间的要求。
7.本实用新型通过以下技术方案得以实现。
8.本实用新型提供的一种用于提拉臂运动控制的联动锁紧机构,包括依次连接的伸缩钩臂、拉臂、回转臂;回转臂安装在机架本体上,所述拉臂上设有伸缩钩臂的起竖点和回转点ⅰ,机架本体的一端设有回转点ⅱ,另一端设有限位安装座,限位安装座与锁紧钩连接,在锁紧钩内设有弹簧;所述拉臂通过曲柄轴与回转臂连接,曲柄轴上依次连接有连杆、滑动杆、拔叉,拔叉通过锁紧钩与限位安装座连接。
9.所述回转臂上设有多个紧固连接件,连杆、滑动杆、拔叉通过紧固连接件与回转臂连接。
10.所述回转点ⅰ通过曲柄轴与回转臂连接。
11.所述回转臂的一端通过回转点ⅱ与机架本体连接。
12.所述拉臂和回转臂与曲柄连杆机构连接。
13.所述伸缩钩臂与起竖缸连接。
14.所述拔叉内设有弹簧。
15.本实用新型的有益效果在于:通过纯机械结构,实现提拉臂机构在提拉装载过程中对回转臂运动的控制;自动控制提拉臂在提拉装载及起竖卸货两大功能之间的自动切换。
附图说明
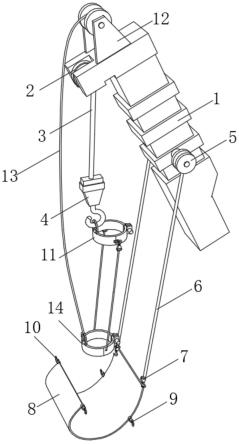
16.图1是本实用新型的结构示意图;
17.图2是本实用新型伸缩钩臂的后移图;
18.图3是本实用新型锁紧钩的脱开限位图;
19.图4是本实用新型伸缩钩臂的到位图;
20.图5是本实用新型锁紧钩的脱开限位图;
21.图6是本实用新型的起竖到位图;
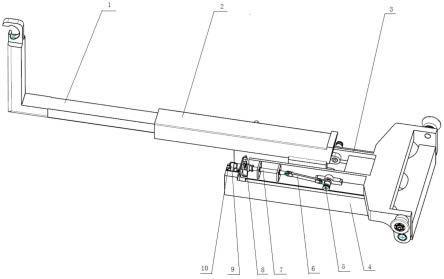
22.图7是本实用新型拉臂的结构示意图;
23.图8是本实用新型回转臂的结构示意图;
24.图中:1-伸缩钩臂,2-拉臂,3-回转臂,4-机架本体,5-曲柄轴,6-连杆,7-滑动杆,8-拔叉,9-锁紧钩,10-限位安装座。
具体实施方式
25.下面进一步描述本实用新型的技术方案,但要求保护的范围并不局限于所述。
26.如图1~8所示,一种用于提拉臂运动控制的联动锁紧机构,包括依次连接的伸缩钩臂1、拉臂2、回转臂3;回转臂3安装在机架本体4上,所述拉臂2上设有伸缩钩臂1的起竖点和回转点ⅰ,机架本体4的一端设有回转点ⅱ,另一端设有限位安装座10,限位安装座10与锁紧钩9连接,在锁紧钩9内设有弹簧;所述拉臂2通过曲柄轴5与回转臂3连接,曲柄轴5上依次连接有连杆6、滑动杆7、拔叉8,拔叉8通过锁紧钩9与限位安装座10连接。
27.所述回转臂3上设有多个紧固连接件,连杆6、滑动杆7、拔叉8通过紧固连接件与回转臂3连接。
28.所述回转点ⅰ通过曲柄轴5与回转臂3连接。
29.所述回转臂3的一端通过回转点ⅱ与机架本体4连接。
30.所述拉臂2和回转臂3与曲柄连杆机构连接。
31.所述伸缩钩臂1与起竖缸连接。
32.所述拔叉8内设有弹簧。
33.具体的,在进行提拉装填时,通过伸缩钩臂1的移动带动货箱运动,根据货箱移动至不同位置,从而控制货箱是否压迫拨叉8的两个状态,实现提拉装填功能及起竖卸货功能之间的切换,即在进行提拉装载时,通过伸缩钩臂1的后移,使货箱上滑块与拨叉8脱开,同时利用拉臂2的回转带动曲柄连杆机构使回转臂3与机架本体4脱开,达到运动轨迹控制的目的;在进行起竖卸货时,只需使货箱上滑块与拨叉8不脱开接触,此时可以保证随时处于可以起竖卸货状态。
34.具体的,通过曲柄连杆机构实现对回转臂3的锁紧解锁,其解锁方式分为拨叉8旋转解锁和拉臂2带动曲柄连杆机构平移解锁。
35.具体的,曲柄连杆机构中,锁紧钩9自带弹簧,能保证解锁过程中不受到大的冲击。
36.具体的,控制拉臂2带动曲柄连杆机构平移解锁,使得锁紧钩9与限位安装座10脱开前,回转臂3与机架本体4处于压紧状态。
37.可以理解的,当需要将地面货箱勾上机架本体4时,伸缩钩臂1后移,伸缩钩臂1、拉臂2一起绕回转臂3运动,一定角度后,伸缩钩臂1、拉臂2、回转臂3三者自动切换为共同运动
模式,直至伸缩钩臂1挂上货箱,然后整套动作的逆运动完成货箱上机架本体4任务;当需要机架本体4上货箱进行起竖自卸时,伸缩钩1、拉臂2、回转臂3为一个整体,一起起竖,完成货箱自卸功能。
38.本实用新型在进行提拉装载时的运行原理如下:
39.1.伸缩钩臂1后移带动货箱后移,此时拨叉8与货箱分离,拨叉8在自带弹簧的作用下复位,此时锁紧钩9与限位安装座10之间存在向上的限位,其具体外形如附图2所示;
40.2.缩钩臂1与拉臂2一同绕回转臂3上回转点ⅰ运动,其中曲柄轴5与拉臂2为一个整体,跟随拉臂2进行从动;运动的前段,回转臂3有向上运动的趋势,锁紧钩9与限位安装座10之间压紧,此时曲柄轴5运动带动滑动杆7对锁紧钩9内弹簧进行压缩,锁紧钩9此时保持不动;运动的中段,此时锁紧钩9与限位安装座10之间压紧力逐渐较小,曲柄轴5运动带动滑动杆7、锁紧钩9平移,在锁紧钩9与限位安装座10之间压紧力减小至零之前,保证锁紧钩9不脱出限位安装座10;在运动的后段,回转臂3压紧机架本体4,此时锁紧钩9与限位安装座10之间脱开接触,在拉臂2回转至与回转臂3接触限位前,拉臂2单独运动,运动到位时具体外形如附图3所示;
41.3.当拉臂2回转至与回转臂3接触限位时,拉臂2带动回转臂3一起绕机架本体4上回转点ⅱ进行运动,直至伸缩钩臂1到达指定位置,运动到位时具体外形如附图4所示。
42.本实用新型在进行起竖卸货时的运行原理如下:
43.1.伸缩钩臂1不后移,此时货箱后移压动拨叉8,拨叉8带动锁紧钩9旋转从而与限位安装座10之间脱离,其具体外形如附图5所示;
44.2.起竖缸带动伸缩钩臂1、拉臂2、回转臂3一起绕机架本体4上回转点ⅱ进行运动,直至将货箱起竖至卸货状态,其具体外形如附图6所示。
45.本实用新型可满足下列所述工况下的锁紧、解锁以及运动控制需求:
46.1.大负载的提拉臂式装载结构;
47.2.提拉臂结构中,起竖缸行程及最大受力受约束情况;
48.3.控制机构要求简化可靠。
49.综上所述,本实用新型为纯机械结构,可自动控制回转臂的运动轨迹,可在提拉装载、起竖卸货两种状态通过伸缩钩臂后退行程自动控制,且锁紧钩内自带弹簧减小运动过程中冲击。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。