1.本实用新型涉及一种具有智能聚料机械手清污机器人,属于漂浮物打捞装置技术领域。
背景技术:
2.目前,江河、湖泊、水库甚至大海由于受主客观因素的影响,水面常常带有各类漂浮物,且水面漂浮物逐年不断增多,给水库、电站以及各种水上设施和饮用水的安全带来隐患,人们都在争取采用各种方式打捞漂浮物。
3.随着科技的不断发展,目前已经研发出许多关于漂浮物打捞的清漂装置,在清漂装置的结构设计上,原有的设计上,虽然也有聚料机构的设计,尤其是在具有侧收集机构的设计上,也有一定的研发。但是针对目前在水电站、水库、城市河道、公园游乐场所等常见漂浮物及污物时,为了便于作业,不仅需要更好的打捞效果,同时还需要更加便捷的转运方式,在传统的结构中,不是通过人工运输到岸上就是通过机械手臂抓取,为了方便,需要一种更加方便转运且打捞效率更高的清漂装置。
技术实现要素:
4.本实用新型的发明目的在于:针对上述存在的问题,提供一种具有智能聚料机械手清污机器人,该装置具有性能可靠、安全性高、效率高的优势,甚至其还具备了打捞起的漂浮物和垃圾的转运更加便捷的优势。
5.本实用新型采用的技术方案如下:
6.一种具有智能聚料机械手清污机器人,包括机器人浮体,所述机器人浮体上设置有用于机器人浮体行进的推进装置,所述机器人浮体的前端部设置有用于打捞漂浮物的网链打捞装置,所述浮体机器人浮体上且位于网链打捞装置的后端部还设置有网链储料箱;
7.所述网链储物箱包括底部可转动的网链传送机构,以及设置于网链传送机构两侧的挡料机构,所述网链打捞装置的出料口与网链储物箱的进料口衔接;
8.所述机器人浮体的前端还设置有聚料机构,通过聚料机构使漂浮物向网链打捞装置靠近。
9.进一步的,所述网链传送机构包括网链传送带,以及用于带动网链传送带转动的驱动装置。
10.进一步的,所述挡料机构为侧挡板;所述网链储物箱具有出料口,网链传送机构将漂浮物通过出料口送出。
11.进一步的,所述推进装置包括设置于机器人浮体后端的主推进器,在所述机器人浮体后端的两侧设置有推进器以用于机器人浮体的行进。
12.进一步的,所述推进装置还包括设置于机器人浮体前端的侧推进器,网链打捞装置所在机器人浮体的两侧设置有侧推进器以用于机器人浮体行进的方向控制。
13.进一步的,所述聚料机构包括设置于网链打捞装置两侧的侧收集机构,所述侧收
集机构可转动的装配于机器人浮体,并通过第一伸缩缸实现来回摆动,以使漂浮物向网链打捞装置聚集;
14.所述侧收集机构包括侧收集架以及设置于侧收集架端部的旋转刷。
15.进一步的,所述侧收集机构还设置有可来回转动的聚料机械手,所述聚料机械手包括可旋转的支架,所述支架上设置有可左右滑动的移动架;
16.所述移动架还设置有可沿移动架上下移动的网瓢。
17.进一步的,所述支架具有横向导杆,所述移动架的顶部设置有第一滑块,所述滑块装配于横向导杆上,通过第二伸缩缸控制横向的滑动;
18.所述网瓢设置有第二滑块,所述第二滑块可上下移动的与移动架装配,并通过第三伸缩缸控制网瓢的上下移动。
19.进一步的,所述聚料机械手还包括设置于侧收集机构上的支座,支架通过回转式减速器装配于支座上,通过回转式减速器带动支架的回转运动。
20.进一步的,所述网链储物箱还设置有举升装置,所述网链储物箱与网链打捞装置匹配的一端部可转动,并通过所述举升装置可使网链储物箱出料口升高。
21.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
22.1、本实用新型的一种具有智能聚料机械手清污机器人通过网链储物箱解决了传统漂浮物打捞自动压缩的问题,通过网链储物箱且可运动的方式能够有效的实现在漂浮物收集的过程中,随着网链打捞装置向后的作用力,可以使漂浮物进行堆积,在堆积过程中能够一定程度的进行压缩,不仅有效的解决了收集问题,同时也解决了运输的问题;
23.2、本实用新型的一种具有智能聚料机械手清污机器人通过聚料机械手的设计能够精准的对水面漂浮物进行汇聚,再借助侧收集机构的作用能够有效的实现更好的促进聚料效果,再结合网链储料箱可上下升降的效果实现更好的物料转运,从而有效的提高了整个结构的打捞效率,更促进了清污机器人的智能化。
附图说明
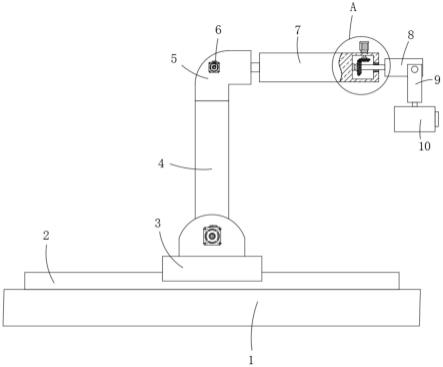
24.图1是本实用新型的结构示意图之一;
25.图2是本实用新型的结构示意图之二;
26.图3是本实用新型俯视图的结构示意图;
27.图4是本实用新型聚料机械手的结构示意图。
28.图中标记:1-机器人浮体,2-主推进器,3-网链储物箱,31-侧挡料板,32-驱动装置,33-网链传送带,4-举升装置,5-护罩,6-侧推进器,7-网链打捞装置,8-侧收集机构,81-第一伸缩缸,82-侧收集架,83-旋转刷,9-聚料机械手,91-支座,92-回转式减速器,93-支架,94-第二伸缩缸,95-移动架,96-第三伸缩缸,97-网瓢,98-第一滑块,99-第二滑块。
具体实施方式
29.下面结合附图,对本实用新型作详细的说明。
30.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
31.实施例1
32.一种具有智能聚料机械手9清污机器人,如图1-图4所示,包括机器人浮体1,所述机器人浮体1上设置有用于机器人浮体1行进的推进装置,所述机器人浮体1的前端部设置有用于打捞漂浮物的网链打捞装置7,所述浮体机器人浮体1上且位于网链打捞装置7的后端部还设置有网链储料箱;
33.所述网链储物箱3包括底部可转动的网链传送机构,以及设置于网链传送机构两侧的挡料机构,所述网链打捞装置7的出料口与网链储物箱3的进料口衔接;
34.所述机器人浮体1的前端还设置有聚料机构,通过聚料机构使漂浮物向网链打捞装置7靠近。
35.本实施例中,作为具体的,为了实现自动化,作为辅助的需求,可增加智能控制系统和电气控制系统等,在实际操作中,根据河面的漂浮物分布情况,可控制机器人浮体1行进至指定区域,到达指定区域后,打捞装置进行打捞,同时,聚料机构将散开的漂浮物尽可能的汇集至网链打捞装置7处,当漂浮物到达网链打捞装置7处,网链打捞装置7会将漂浮物打捞起,并传送至网链储物箱3,在漂浮物不断的进入,根据实际情况可控制网链传送机构转动,使网链储物箱3内的漂浮物向后移动,从而实现漂浮有效的打捞和收集,而在收集过程中,漂浮物在堆积时会产生挤压,从而有效的节省了存储空间。
36.基于上述具体结构的设计基础上,作为具体的设计,所述网链传送机构包括网链传送带33,以及用于带动网链传送带33转动的驱动装置32。当然,作为具体的描述,在网链打捞装置7也包括驱动装置32以及网链传送带33。由于网链传送带33的摩擦大,其打捞效果更好,传送的效率也更高。
37.在上述具体结构的设计基础上,作为更加具体的,所述挡料机构为侧挡板;所述网链储物箱3具有出料口,网链传送机构将漂浮物通过出料口送出。在此设计中,为了有效的作为阻挡,在网链储物箱3的出料口处可设置转动的遮挡板,所述遮挡板可通过销轴插接在侧挡板之间,且可自由转动。在出料时,可由漂浮物的作用力使其打开。
38.作为更加具体的设计,所述推进装置包括设置于机器人浮体1后端的主推进器2,在所述机器人浮体1后端的两侧设置有推进器以用于机器人浮体1的行进。作为方向调节,可以采用一侧,调整完毕后继续前行。
39.但是作为更加优化的设计,且为了保证整个结构的效果,所述推进装置还包括设置于机器人浮体1前端的侧推进器6,网链打捞装置7所在机器人浮体1的两侧设置有侧推进器6以用于机器人浮体1行进的方向控制。在此当中,侧推进器6主要是作为方向调节的结构,从而实现整个浮体可快速到达指定位置。
40.基于上述具体结构的设计基础上,作为更加具体的设计,所述聚料机构包括设置于网链打捞装置7两侧的侧收集机构8,所述侧收集机构8可转动的装配于机器人浮体1,并通过第一伸缩缸81实现来回摆动,以使漂浮物向网链打捞装置7聚集;
41.所述侧收集机构8包括侧收集架82以及设置于侧收集架82端部的旋转刷83。
42.在该设计中,其不仅有效的使两侧漂浮物向中部靠近,还能使远端的漂浮物向打捞装置聚集。更加具体的,所述侧收集机构8通过转动轴装配在机器人浮体1上,且可自由转动,所述第一伸缩缸81一端部铰接于浮体,另一端铰接于侧收集机构8,其铰接转动方向为水平方向,从而实现侧收集机构8的来回摆动。
43.在上述具体结构的设计基础上,为了实现更大范围的漂浮物收集,且为了更加有效的提高打捞效率,作为更加具体的设计,所述侧收集机构8还设置有可来回转动的聚料机械手9,所述聚料机械手9包括可旋转的支架93,所述支架93上设置有可左右滑动的移动架95;
44.所述移动架95还设置有可沿移动架95上下移动的网瓢97。
45.在上述具体的设计基础上,有效的控制网瓢97的运动,在此当中,网瓢97作为摆动的机械手,实现物料的有效收集和打捞。
46.作为更加具体的设计,所述支架93具有横向导杆,所述移动架95的顶部设置有第一滑块98,所述滑块装配于横向导杆上,通过第二伸缩缸94控制横向的滑动;
47.所述网瓢97设置有第二滑块99,所述第二滑块99可上下移动的与移动架95装配,并通过第三伸缩缸96控制网瓢97的上下移动。
48.在上述具体的结构设计中,所述第一滑块98和第二滑块99中部均设置有通孔。作为着重说明的是,在此结构设计中,尤其是移动架95的设计,在其受到重力的情况下,其受力可由横向导杆进行分担,从而能够有效的保证第二伸缩缸94不受损。而第三伸缩缸96在作用力下,其是向下的作用力,不会对伸缩杆产生弯曲力,因此其受力为伸缩缸的作用力。更加具体的,在此,第二伸缩缸94和第三伸缩缸96均为固定装配,已保证其伸缩方向的作用力。
49.在上述具体结构的设计基础上,为了进一步的提高打捞范围,更加具体的,所述聚料机械手9还包括设置于侧收集机构8上的支座91,支架93通过回转式减速器92装配于支座91上,通过回转式减速器92带动支架93的回转运动。以图3为例,在每个侧收集机构上均设置有一个聚料机械手,在图中显示虽然是多个,但是作为本设计中,具体的为一个,且其他图示为聚料机械手的运动轨迹示意。
50.在上述具体结构的设计基础上,作为更加具体的设计,所述网链储物箱3还设置有举升装置4,所述网链储物箱3与网链打捞装置7匹配的一端部可转动,并通过所述举升装置4可使网链储物箱3出料口升高。
51.更加具体的,所述举升装置4采用的是伸缩缸,伸缩缸的一端部铰接机器人浮体1,另一端铰接网链储物箱3,在伸缩缸的伸缩下实现升降功能。
52.更加具体的,在网链储物箱3与网链打捞装置的衔接处还设置有护罩5。
53.上述设计的工作原理:当需要打捞水电站、水库、城市河道、公园游乐场所等常见漂浮物及污物时,启动推进器将清污机器人向漂浮物及污物处前行,到达漂浮物及污物区域后,打捞网链装置启动运行将漂浮物及污物打捞输送至储料网链箱内,同时启动侧收集机构与聚料机械手辅助聚料,提高打捞效率,当储料网链箱内装满漂浮物及污物,清污机器人自动返回岸边漂浮物处理平台,通过电动同步举升机构(举升装置)将储料网链箱举升一定的高度,直接将打捞收集的漂浮物和污物输送到水面以上一定高度的岸上处理点。岸上处理点的漂浮物和污物装入密闭垃圾车运至垃圾处理厂进行无公害化集中处理.重复以上打捞流程,直至水面漂浮物和污物全部清理完成。
54.综上所述:
55.1、本实用新型的一种具有智能聚料机械手清污机器人通过网链储物箱解决了传统漂浮物打捞自动压缩的问题,通过网链储物箱且可运动的方式能够有效的实现在漂浮物
收集的过程中,随着网链打捞装置向后的作用力,可以使漂浮物进行堆积,在堆积过程中能够一定程度的进行压缩,不仅有效的解决了收集问题,同时也解决了运输的问题;
56.2、本实用新型的一种具有智能聚料机械手清污机器人通过聚料机械手的设计能够精准的对水面漂浮物进行汇聚,再借助侧收集机构的作用能够有效的实现更好的促进聚料效果,再结合网链储料箱可上下升降的效果实现更好的物料转运,从而有效的提高了整个结构的打捞效率,更促进了清污机器人的智能化。
57.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。