1.本实用新型涉及按摩器技术,具体地,涉及一种按摩椅。
背景技术:
2.按摩椅通常包含有机体和扶手,机体包含供按摩机芯活动的机架,而扶手则通常安装有按摩用户手臂的按摩气囊。为了便于用户进出或者适应不同体格的用户的按摩需要,部分按摩椅会将扶手设计成可相对机体活动,现有的按摩椅的扶手通常是以相对机体整体左右平移(如专利申请cn201921657724.8)、相对机体整体前后平移(如专利申请cn201520118119.9)、或者相对机体左右转动(如专利申请cn201810559774.6)来扩展机体两侧空间。本技术旨在提供一种不同于现有技术的解决方案。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种扩展按摩椅的侧方空间的解决方案。
4.为了达到上述目的,本实用新型采用的技术方案如下:一种按摩椅,包含机体和扶手;所述机体和扶手之间设置有允许扶手以第一方式远离机体和以第二方式靠近机体的连接装置,所述第一方式为扶手相对机体在左右方向上由贴近状态切换至远离状态且由前后延展状态切换至上下延展状态,所述第二方式为扶手相对机体在左右方向上由远离状态切换至贴近状态且由上下延展状态切换至前后延展状态。
5.较佳地,所述连接装置被设置成:使扶手由贴近状态切换至远离状态、由前后延展状态切换至上下延展状态的过程同步进行,使扶手由远离状态切换至贴近状态、由上下延展状态切换至前后延展状态的过程同步进行。
6.所述连接装置包含允许扶手在远离状态和贴近状态间切换的第一状态切换机构、以及允许扶手在前后延展状态和上下延展状态间切换的第二状态切换机构,所述第一状态切换机构和所述第二状态切换机构相连接,且其中之一连接于机体上,其中另一连接于扶手上。
7.较佳地,所述第一状态切换机构和所述第二状态切换机构其中之一活动时带动其中另一活动。
8.较佳地,所述第一状态切换机构为四连杆机构,所述第二状态切换机构为枢转机构;所述四连杆机构在左右方向上的一侧连杆连接于所述所述枢转机构上,以使两者能够以左右延展的轴线为中心相对转动。
9.较佳地,所述枢转机构连接于机体上,所述四连杆机构在左右方向上的另一侧连杆连接于扶手上。
10.较佳地,所述枢转机构和所述机体之间设置有随着枢转机构旋转而从动伸缩的从动伸缩连杆,或者设置有主动伸缩以推动枢转机构旋转的主动伸缩连杆。
11.较佳地,所述四连杆机构中的一连杆和机体之间设置有与两者分别球铰接的从动限位杆,或者所述四连杆机构中的一连杆和扶手之间设置有与两者分别球铰接的从动限位
杆。
12.较佳地,所述从动伸缩连杆为气压式支撑杆。
13.由于采用了以上技术方案,本实用新型具有以下有益效果:本技术的按摩椅,扶手在相对机体处于远离状态时,还由前后延展状态切换至上下延展状态,极大地扩展了机体两侧的活动空间。
附图说明
14.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例的附图作简单地介绍,显而易见地,下面描述中的附图仅仅涉及本实用新型的一些实施例,而非对本实用新型的限制。
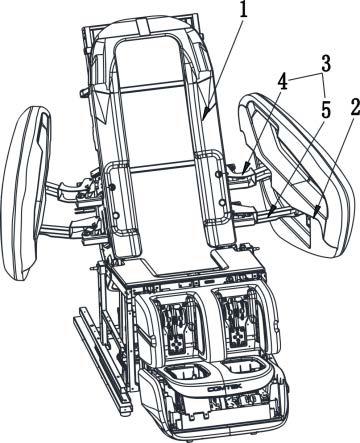
15.图1绘示了一实施例的按摩椅的示意图(扶手处于未相对机体活动的初始状态);
16.图2绘示了一实施例的按摩椅的示意图(扶手处于相对机体活动后的打开状态);
17.图3a和图3b分别绘示了不同视角下机体的安装架、扶手、连接装置处于分解状态的示意图;
18.图3c绘示了机体的安装架、扶手、连接装置处于组合状态的示意图;
19.图4a绘示了扶手由初始状态切变换至打开状态的过程图;
20.图4b绘示了图4a省略扶手后的示意图。
具体实施方式
21.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型做进一步详细说明。通常在此处附图中描述和示出的本实用新型实施例的组件可以各种不同的配置来布置和设计。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.下面结合附图,对本实用新型的一些实施方式作详细说明。在不冲突的情况下,下述的实施例中的特征可以相互组合。
23.结合图1和图2,在一实施例中,本技术的按摩椅包含机体1、扶手2、以及将扶手2连接至机体1的连接装置3,连接装置3被设置成允许扶手2以第一方式远离机体1和以第二方式靠近机体1,图1的状态变换至图2的状态对应于第一方式,具体而言,第一方式为扶手2相对机体1在左右方向上由贴近状态切换至远离状态且由前后延展状态切换至上下延展状态。贴近状态和前后延展状态为按摩椅通常的使用状态,远离状态和上下延展状态为方便用户进出机体1的进出状态,在进出状态时,机体1两侧的空间敞开。需说明的是,上下延展状态系指扶手2由通常的使用状态变换至垂直向上或倾斜向上的状态,扶手2由前后延展状态切换至上下延展状态的转动角度,可为60度至100度,如85度。本实施例,第二方式与第一方式的方式相逆,具体而言,第二方式为扶手2相对机体1在左右方向上由远离状态切换至贴近状态且由上下延展状态切换至前后延展状态。
24.机体1包含有用以与连接装置3相连接的安装架1a。
25.连接装置3被设置成:使扶手2由贴近状态切换至远离状态、由前后延展状态切换至上下延展状态的过程同步进行,使扶手2由远离状态切换至贴近状态、由上下延展状态切换至前后延展状态的过程同步进行。具体而言,结合图3a至图3c,本实施例的连接装置3包
含:第一状态切换机构4、从动伸缩连杆5、从动限位杆6、第二状态切换机构7。第一状态切换机构4允许扶手2在远离状态和贴近状态间切换,而第二状态切换机构7允许扶手2在前后延展状态和上下延展状态间切换,第一状态切换机构4和第二状态切换机构7相连接,且其中之一(第一状态切换机构4)连接于机体1上,其中另一(第二状态切换机构7)连接于扶手2上,结合图4a和图4b,扶手2受力活动时,第一状态切换机构4对应活动,并带动第二状态切换机构7活动。本实施例,第一状态切换机构4为四连杆机构,第二状态切换机构7为枢转机构,安装架1a上设置有配合枢转机构使用的枢转座1b。第一状态切换机构4包含连杆4a、连杆4b、连杆4c、连杆4d,四者两两枢接,连杆4a和连杆4b在左右方向上分设于两侧,连杆4a连接于第二状态切换机构7(枢转机构)上,从而第一状态切换机构4和第二状态切换机构7能够以左右延展的轴线为中心相对转动。枢转机构连接于机体1上,四连杆机构的连杆4b连接于扶手2上。从动伸缩连杆5设置于枢转机构和机体1之间,并随着枢转机构旋转而从动伸缩。从动限位杆6设置于连杆4c和机体1之间,且从动限位杆6与两者分别球铰接,本实施例从动伸缩连杆5为气压式支撑杆。结合图4a和图4b,当扶手2由未打开状态逐渐变换至打开状态时,四连杆机构对应逐步转动并逐步展开。
26.以上即为本技术的第一实施方式,应理解,连接装置3的具体实施方式并不限于前述实施方式。在另一实施例中,前述从动伸缩连杆5可替换成主动伸缩连杆,主动伸缩连杆可设置于前述枢转机构和机体1之间,以通过主动伸缩推动枢转机构旋转,主动伸缩连杆可为常见的电动推杆,通过主动伸缩推杆可实现扶手2自动开闭。在另一实施例中,从动限位杆可设置于四连杆机构中的连杆和扶手2之间,且与两者分别球铰接。在另一实施例中,四连杆机构和枢转机构的位置可对调,即四连杆机构在左右方向一侧的连杆连接于安装架1a上,而枢转机构连接于四连杆机构在左右方向另一侧的连杆上。不同于前述实施例四连杆机构和枢转机构借由伸缩连杆、从动限位杆相配合能够实现连动,在另一实施例中,四连杆机构和枢转机构可分别单独活动,亦即扶手由贴近状态切换至远离状态、由前后延展状态切换至上下延展状态的过程可先后进行,由远离状态切换至贴近状态、由上下延展状态切换至前后延展状态的过程可先后进行。在另一实施例中,枢转机构可调整成具有阻尼特性的枢转机构,即其受到超过一定力度时才可旋转,此时可省略伸缩连杆。在另一实施例中,四连杆机构上可设置有使四连杆机构在不受力时保持稳定而受力时从动的连动机构,从而可省略从动限位杆。不同于前述实施例第一状态切换机构4采用四连杆机构来允许扶手在远离状态和贴近状态间切换,在另一实施例中,第一状态切换机构4可采用电动式滑动结构来实现扶手能够在在远离状态和贴近状态间切换,电动式滑动结构可包含固定于枢转机构的基座和可相对基座滑动的滑动座,滑动座和扶手连接。
27.本技术的按摩椅,扶手在相对机体处于远离状态时,还由前后延展状态切换至上下延展状态,极大地扩展了机体两侧的活动空间。
28.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。