1.本发明涉及自动化物流技术领域,具体是一种智能制造用感应式轨道送货机器装置。
背景技术:
2.随着机器人技术、工厂集成系统自动化技术的不断发展与进步,以及柔性自动化制造系统、全自动化立体仓库得到了越来越广泛的应用,智能仓储环节作为工厂自动化中的一个重要环节,在物料供给、库存管理以及物料数日输出的控制等方面,起到了至关重要的作用。
3.目前市面上的轨道送货机器难以对不同形状的货物进行抓取转运,这导致送货机器的适用范围大大减小,使得送货效率降低,送货成本提升,针对上述情况,我们推出了一种智能制造用感应式轨道送货机器装置。
技术实现要素:
4.本发明的目的在于提供一种智能制造用感应式轨道送货机器装置,以解决上述背景技术中提出目前市面上的轨道送货机器难以对不同形状的货物进行抓取转运,这导致送货机器的适用范围大大减小,使得送货效率降低,送货成本提升的问题。
5.本发明的技术方案是:
6.包括空中轨道车,所述空中轨道车下表面设置有电机,且电机的输出端固定连接有双向液压杆,所述双向液压杆的下表面设置有工业相机,所述双向液压杆的两个伸缩端均固定连接有连接板,且连接板下端均固定有夹持组件,所述夹持组件包括:壳体、进气口、连接管、气泵、内腔和限位顶柱,所述壳体固定连接于所述连接板下端,所述壳体远离所述双向液压杆的一侧设置有进气口,且进气口外壁连通有连接管,所述连接管的另一端连通有气泵,且气泵固定于所述电机外壁,所述壳体内部开设有内腔,且内腔内部等距离分隔有若干个分腔,所述分腔通过内腔与进气口相连通,所述若干个分腔内部均滑动连接有限位顶柱,所述壳体靠近所述双向液压杆的一侧开设有与限位顶柱相对应的第一槽口,所述空中轨道车内部设置有控制器,且控制器与工业相机电性连接,所述控制器与电机、双向液压杆和气泵均电性连接。
7.进一步的,所述工业相机为3d工业相机。
8.进一步的,所述限位顶柱末端设置有橡胶头,且橡胶头的外口尺寸大于第一槽口的内口尺寸。
9.进一步的,所述两个夹持组件下表面均设置有加固组件,且加固组件包括:电动推杆、伸缩杆、电磁阀门、固定板、第一延伸板、活塞、通口、第二延伸板、滑块、滑槽和红外感应器,所述电动推杆设置于所述壳体下表面,且电动推杆的伸缩端固定连接有固定板,所述固定板与所述壳体之间设置有伸缩杆,且伸缩杆内部设置有通腔,所述伸缩杆的一端连通有电磁阀门,且电磁阀门的一端与内腔相连通,所述伸缩杆的另一端与固定板内部相连通,所
述固定板内壁滑动连接有第一延伸板,且第一延伸板一端设置有活塞,所述活塞和第一延伸板表面开设有通口,所述第一延伸板内壁滑动连接有第二延伸板,且第二延伸板外壁设置有滑块,所述第一延伸板内壁开设有与滑块滑动配合的滑槽,所述固定板靠近双向液压杆的一端开设有与第一延伸板相匹配的第三槽口,所述第一延伸板靠近双向液压杆的一端开设有与第二延伸板相匹配的第二槽口,所述固定板下表面设置有红外感应器,所述红外感应器与控制器电性连接,且控制器与电磁阀门电性连接。
10.进一步的,所述其中一个加固组件的第二延伸板的一端固定有卡头,所述另一个加固组件的第二延伸板的一端固定有与卡头相匹配的卡槽。
11.进一步的,所述活塞的外壁与固定板的内壁紧密贴合。
12.进一步的,所述第一延伸板、第二延伸板和卡头均为碳纤维材质。
13.进一步的,所述空中轨道车底部设置有纵向牵引钢绳,且纵向牵引钢绳上端设置有牵引轮,所述纵向牵引钢绳下端固定连接有承载板,所述电机的上表面与承载板固定连接,所述空中轨道车内部设置有电机,且电机的输出端与牵引轮的一端固定连接。
14.本发明通过改进在此提供一种智能制造用感应式轨道送货机器装置,与现有技术相比,具有如下改进及优点:
15.其一:本发明,两个夹持组件可通过双向液压杆的带动靠近货物外表面,夹持组件的壳体一侧通过进气口和连接管与气泵进行连通,且进气口与壳体的内腔相连通,从而使得气泵能够向内腔中通入气体,进而使内腔中若干个分腔中的限位顶柱受气体的推动从壳体一侧的第一开槽处向外顶出,顶出的若干个限位顶柱可与货物外表面紧密贴合,配合双向液压杆的收缩,能够完成货物的夹持固定工作,设置的若干个独立的限位顶柱能够与形状不同的货物外表面进行贴合,从而实现不同形状货物的夹持工作。
16.其二:本发明,设置的工业相机,可对下方区域进行图像采集,并通过工业相机内的图像视觉识别系统进行货物图像的识别分析,从而判断下方货物的位置及状态,判断生成的电信号会发送给控制器,控制器会控制电机带动双向液压杆和两个夹持组件调整夹持角度,该工业相机为3d工业相机,3d工业相机采用三维扫描技术,可以更直观的反馈现场货物的放置状态以及形状结构,从而更加方便图像视觉识别系统对其进行判断,以便保证夹持的准确性。
17.其三:本发明,两个夹持组件下端均设置的加固组件配合电磁阀门及气泵,可使其内部的第一延伸板和第二延伸板向外延伸,两组加固组件的第一延伸板和第二延伸板配合电动推杆的收缩,可对货物下表面进行承托,从而提高货物转运的稳定性,保证货物安全,第一延伸板、第二延伸板和卡头均为碳纤维材质,设置的延伸板和卡接位置的卡头均为碳纤维材质,能够大大提高加固组件的结构强度,避免承托货物过程中发生断裂,且两个加固组件的第二延伸板可通过其末端的卡头与另一个第二延伸板的卡槽进行卡合,从而提高加固组件整体延伸后的牢固性,保证货物的承托更为稳定。
附图说明
18.下面结合附图和实施例对本发明作进一步解释:
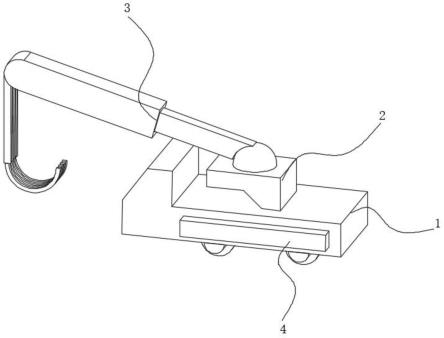
19.图1是本发明主视结构示意图;
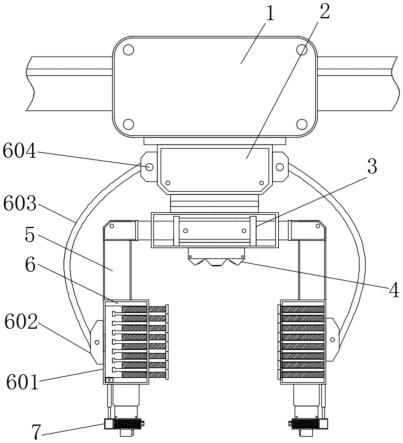
20.图2是本发明夹持组件结构示意图;
21.图3是本发明夹持货物状态结构示意图;
22.图4是本发明壳体结构示意图;
23.图5是本发明加固组件结构示意图
24.图6是本发明图5中a处放大结构示意图
25.附图标记说明:1、空中轨道车;2、电机;3、双向液压杆;4、工业相机;5、连接板;6、夹持组件;601、壳体;602、进气口;603、连接管;604、气泵;605、内腔;606、限位顶柱;7、加固组件;701、电动推杆;702、伸缩杆;703、电磁阀门;704、固定板;705、第一延伸板;706、活塞;707、通口;708、第二延伸板;709、滑块;710、滑槽;711、卡头。
具体实施方式
26.下面对本发明进行详细说明,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.本发明通过改进在此提供一种智能制造用感应式轨道送货机器装置,如图1-图4所示,空中轨道车1,空中轨道车1下表面设置有电机2,且电机2的输出端固定连接有双向液压杆3,双向液压杆3的下表面设置有工业相机4,双向液压杆3的两个伸缩端均固定连接有连接板5,且连接板5下端均固定有夹持组件6,夹持组件6包括:壳体601、进气口602、连接管603、气泵604、内腔605和限位顶柱606,壳体601固定连接于连接板5下端,壳体601远离双向液压杆3的一侧设置有进气口602,且进气口602外壁连通有连接管603,连接管603的另一端连通有气泵604,且气泵604固定于电机2外壁,壳体601内部开设有内腔605,且内腔605内部等距离分隔有若干个分腔,分腔通过内腔605与进气口602相连通,若干个分腔内部均滑动连接有限位顶柱606,壳体601靠近双向液压杆3的一侧开设有与限位顶柱606相对应的第一槽口,空中轨道车1内部设置有控制器,且控制器与工业相机4电性连接,控制器与电机2、双向液压杆3和气泵604均电性连接,设置的空中轨道车1通过内部可转动的滑轮在相应的轨道上移动,从而带动机器的夹持组件6移动至货物区域进行夹持转运工作,而设置的工业相机4可对下方区域进行图像采集,并通过工业相机4内的图像视觉识别系统进行货物图像的识别分析,从而判断下方货物的位置及状态,判断生成的电信号会发送给控制器,控制器会控制电机2带动双向液压杆3和两个夹持组件6调整夹持角度,而两个夹持组件6可通过双向液压杆3的带动靠近货物外表面,夹持组件6的壳体601一侧通过进气口602和连接管603与气泵604进行连通,且进气口602与壳体601的内腔605相连通,从而使得气泵604能够向内腔605中通入气体,进而使内腔605中若干个分腔中的限位顶柱606受气体的推动从壳体601一侧的第一开槽处向外顶出,顶出的若干个限位顶柱606可与货物外表面紧密贴合,配合双向液压杆3的收缩,能够完成货物的夹持固定工作,设置的若干个独立的限位顶柱606能够与形状不同的货物外表面进行贴合,从而实现不同形状货物的夹持工作,控制器的型号为“c8051f020单片机”。
28.优选的,工业相机4为3d工业相机,3d工业相机采用三维扫描技术,可以更直观的反馈现场货物的放置状态以及形状结构,从而更加方便图像视觉识别系统对其进行判断,以便保证夹持的准确性,该3d工业相机的型号为“uhd1000”。
29.优选的,限位顶柱606末端设置有橡胶头,且橡胶头的外口尺寸大于第一槽口的内口尺寸,每个限位顶柱606的末端均设置有橡胶头,可有效提高与货物接触面的摩擦力,以保证货物转运的稳定性,且橡胶头和限位顶柱606在随着气泵604抽气回缩的过程中,橡胶头会位于壳体601的外侧,不会随着限位顶柱606进入分腔中,这使得位于壳体601外侧的橡胶头可同样对形状规整的矩形货物进行夹持处理,以提高夹持过程的稳定性。
30.如图1-图3以及图5-图6所示,两个夹持组件6下表面均设置有加固组件7,且加固组件7包括:电动推杆701、伸缩杆702、电磁阀门703、固定板704、第一延伸板705、活塞706、通口707、第二延伸板708、滑块709、滑槽710和红外感应器712,电动推杆701设置于壳体601下表面,且电动推杆701的伸缩端固定连接有固定板704,固定板704与壳体601之间设置有伸缩杆702,且伸缩杆702内部设置有通腔,伸缩杆702的一端连通有电磁阀门703,且电磁阀门703的一端与内腔605相连通,伸缩杆702的另一端与固定板704内部相连通,固定板704内壁滑动连接有第一延伸板705,且第一延伸板705一端设置有活塞706,活塞706和第一延伸板705表面开设有通口707,第一延伸板705内壁滑动连接有第二延伸板708,且第二延伸板708外壁设置有滑块709,第一延伸板705内壁开设有与滑块709滑动配合的滑槽710,固定板704靠近双向液压杆3的一端开设有与第一延伸板705相匹配的第三槽口,第一延伸板705靠近双向液压杆3的一端开设有与第二延伸板708相匹配的第二槽口,固定板704下表面设置有红外感应器712,红外感应器712与控制器电性连接,且控制器与电磁阀门703电性连接,两个夹持组件6下端均设置有加固组件7,加固组件7的电动推杆701可推动固定板704下表面的红外感应器712对夹持的货物进感应,在红外感应器712感应不到货物时,则代表红外感应器712位于货物的底部下方,此时红外感应器712会向控制器发出电信号,控制器会控制与内腔605相连通的电磁阀门703打开,从而使内腔605中通入的气体从伸缩杆702的通腔通入固定板704内部,此时气泵604会持续通气以保证内腔605的气压的稳定,避免夹持组件6的夹持力减小,通入的气体可对固定板704内部的活塞706施加压力,以推动活塞706和第一延伸板705向货物方向移动,且气体可同时通过活塞706和第一延伸板705表面的通口707处通入第一延伸板705内部,从而同样推动其内部的第二延伸板708通过滑块709沿着滑槽710向货物方向移动,向外移动的第一延伸板705和第二延伸板708可分别从第三槽口和第二槽口处向外伸出,两组加固组件7的第一延伸板705和第二延伸板708配合电动推杆701的收缩,可对货物下表面进行承托,从而提高货物转运的稳定性,保证货物安全。
31.优选的,其中一个加固组件7的第二延伸板708的一端固定有卡头711,另一个加固组件7的第二延伸板708的一端固定有与卡头711相匹配的卡槽,两个加固组件7的第二延伸板708可通过其末端的卡头711与另一个第二延伸板708的卡槽进行卡合,从而提高加固组件7整体延伸后的牢固性,保证货物的承托更为稳定。
32.优选的,活塞706的外壁与固定板704的内壁紧密贴合,活塞706与固定板704的内壁无缝隙,避免存在缝隙而导致气体的渗漏,从而影响后续第一延伸板705和第二延伸板708的延伸操作。
33.优选的,第一延伸板705、第二延伸板708和卡头711均为碳纤维材质,设置的延伸板和卡接位置的卡头711均为碳纤维材质,能够大大提高加固组件7的结构强度,避免承托货物过程中发生断裂。
34.优选的,空中轨道车1底部设置有纵向牵引钢绳,且纵向牵引钢绳上端设置有牵引
轮,纵向牵引钢绳下端固定连接有承载板,电机的上表面与承载板固定连接,空中轨道车1内部设置有电机,且电机的输出端与牵引轮的一端固定连接,设置的空中轨道车1内部的电机可带动牵引轮进行旋转,从而使其外壁缠绕的牵引钢绳向下松放,进而使其下端的承载板和整个夹持组件6及加固组件7下降,以便对下方的货物进行夹持,并可通过电机驱动牵引轮反转来吊起整个夹持货物进行转运。
35.工作原理:首先设置的空中轨道车1通过内部可转动的滑轮在相应的轨道上移动,从而带动机器的夹持组件6移动至货物区域进行夹持转运工作,而空中轨道车1内部的电机可带动牵引轮进行旋转,从而使其外壁缠绕的牵引钢绳向下松放,进而使其下端的承载板和整个夹持组件6及加固组件7下降,以便对下方的货物进行夹持,然后设置的3d工业相机4可采用三维扫描技术对下方区域进行图像采集,并通过工业相机4内的图像视觉识别系统进行货物图像的识别分析,从而判断下方货物的位置及状态,判断生成的电信号会发送给控制器,控制器会控制电机2带动双向液压杆3和两个夹持组件6调整夹持角度,而两个夹持组件6可通过双向液压杆3的带动靠近货物外表面,由于夹持组件6的壳体601一侧通过进气口602和连接管603与气泵604进行连通,且进气口602与壳体601的内腔605相连通,从而使得气泵604能够向内腔605中通入气体,进而使内腔605中若干个分腔中的限位顶柱606受气体的推动从壳体601一侧的第一开槽处向外顶出,顶出的若干个限位顶柱606可与货物外表面紧密贴合,配合双向液压杆3的收缩,能够完成货物的夹持固定工作,设置的若干个独立的限位顶柱606能够与形状不同的货物外表面进行贴合,从而实现不同形状货物的夹持工作,紧接着加固组件7的电动推杆701可推动固定板704下表面的红外感应器712对夹持的货物进感应,在红外感应器712感应不到货物时,则代表红外感应器712位于货物的底部下方,此时红外感应器712会向控制器发出电信号,控制器会控制与内腔605相连通的电磁阀门703打开,从而使内腔605中通入的气体从伸缩杆702的通腔通入固定板704内部,此时气泵604会持续通气以保证内腔605的气压的稳定,避免夹持组件6的夹持力减小,最后通入的气体可对固定板704内部的活塞706施加压力,以推动活塞706和第一延伸板705向货物方向移动,且气体可同时通过活塞706和第一延伸板705表面的通口707处通入第一延伸板705内部,从而同样推动其内部的第二延伸板708通过滑块709沿着滑槽710向货物方向移动,向外移动的第一延伸板705和第二延伸板708可分别从第三槽口和第二槽口处向外伸出,两组加固组件7的第一延伸板705和第二延伸板708配合电动推杆701的收缩,可对货物下表面进行承托,从而提高货物转运的稳定性,保证货物安全。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。