1.本公开涉及用于制造半导体器件的半导体制造装置的基板转移方法和装置,并且具体地,涉及一种基板转移方法和装置,当在包括基板转移机械手以装载或卸载基板的基板转移装置中装载或卸载基板时,其使用基板的位置信息来控制基板转移机械手。
背景技术:
2.通常,为了制造半导体器件而执行薄膜沉积工艺、光刻工艺、刻蚀工艺等,并且每个工艺在腔室中执行,所述腔室被设计为用于对应工艺的优化环境。薄膜沉积工艺是指通过将原材料沉积在硅晶片上而形成薄膜的工艺,光刻工艺是指使用感光材料使在薄膜之中选择的区域暴露或遮盖的工艺,以及刻蚀工艺是指通过去除选择的区域的薄膜而以期望的方式对选择的区域进行图案化的工艺。
3.近来,为了提高生产率,大量使用集群型(cluster-type)基板处理装置。集群型基板处理装置包括彼此紧密耦接的多个处理模块和转移模块等,该转移模块用于转移基板。
4.图1是示意性地示出集群型基板处理装置的配置的平面图。集群型基板处理装置包括多个处理模块20和装载锁定模块30,这些模块围绕转移模块10耦接。
5.转移模块10包括安装在其中的转移机械手40,该转移机械手40用于转移基板s。基板s通过转移机械手40在处理模块20和装载锁定模块30之中移动。转移模块10除了需要设置或维护的情况之外总是保持真空状态。
6.处理模块20是在处理腔室21内对基板s执行诸如薄膜沉积和刻蚀的实际处理的地方,并且处理模块20包括基板安置单元,在该基板安置单元中,基板被安置(seat)在处理腔室21内,该基板安置单元包括可以放置多个基板的基座(susceptor)。
7.当基板s被转移进或转移出处于真空状态的每个处理模块20时,装载锁定模块30用作基板s暂时停留的缓冲空间。通常,考虑到生产率,大量使用两个腔室被竖向地叠置的结构作为装载锁定模块30。
8.因此,装载锁定模块30在基板s从外部被转移进处理模块20中时被切换为真空状态,而在基板s从处理模块20被转移至外部时被切换为大气状态(atmospheric state)。
9.图2是集群型基板处理装置的侧截面图。集群型基板处理装置具有这样一种结构:其中,装载锁定模块30和处理模块20被耦接至转移模块10的边缘,并且转移模块10包括腔室11以及在腔室11中操作的转移机械手40。
10.转移机械手40包括驱动单元框架41、驱动轴43、机械手臂44、以及基板安置单元45。驱动单元框架41支撑诸如电机(motor)的驱动单元,驱动轴43从驱动单元框架41的顶部延伸,并且被驱动单元转动和抬升/下放(lifted/lowered),机械手臂44不仅被驱动轴43转动和抬升/下放,而且被驱动轴43伸展和收缩,并且基板安置单元45耦接至机械手臂44的端部,以直接抬升基板s。
11.驱动单元框架41通过腔室底部表面12被固定。具体地,凸缘(flange)42形成在驱动单元框架41的定位在腔室11中的一部分上,以沿着其外周向表面突出,并且被焊接至腔
室底部表面12,从而保持腔室11的真空状态。
12.通过驱动轴43的转动和抬升/下放运动以及基板安置单元45的水平运动将基板s转移至处理模块20或装载锁定模块30的转移机械手40,需要在有限的空间内非常精确地操作。
13.因此,在装置被设定时,必须执行将参考位置设定为转移机械手40的操作的参考点的过程。
14.即,为了使转移机械手40将基板装载至处理腔室21内的基座的常规位置或将基板从处理腔室21内的基座卸载,需要各种信息。各种信息包括:关于转移机械手40被抬升/下放多少、转移机械手40的转动角度、以及机械手臂的伸长量的信息,这些信息基于转移机械手40的设计位置以及在处理腔室21内的基座的位置。
15.基于这种信息,熟练的机械手工程师在装置的初始设定操作期间通过诸如示教器(teaching pendant)的工具来获取适合于该装置的数据,并且手动输入该数据以完成初始的设定操作。然后,由于诸如处理腔室21内的基座的更换的硬件改变,在许多情况下需要重新设定参考值。
16.考虑到转移机械手40实际操作的环境是真空状态,期望在真空状态下执行初始参考值的设定过程。然而,在大多数情况下,机械手工程师在用肉眼或使用单独的工具检查的同时执行操作。在这种情况下,参考值设定操作是在大气状态下执行的。
17.在大气状态下执行初始参考值设定操作之后,通过真空抽吸过程和加热过程将处理腔室21切换为真空状态。在这样的真空抽吸过程或加热过程期间,由于在处理腔室21内的基座的位置变化,可能需要重新执行参考值设定操作。
技术实现要素:
18.技术问题
19.各种实施例针对一种基板转移方法和装置,当需要校正操作时,该基板转移方法和装置可以在设定在基板转移机械手装载或卸载基板时用作参考值的参考值之后自动地执行将参考值校正为新参考值的操作,从而将基板准确地定位在腔室内的基座的中心。
20.解决问题的技术方案
21.在一个实施例中,基板转移方法可以包括:第一基板装载步骤,通过使用第一参考值将基板装载至腔室内的基座中,该第一参考值在基板转移机械手将基板装载至基座中或将基板从基座中卸载时用作参考值;第一位置调整步骤,将基板的位置调整至基座的第一位置;第一基板卸载步骤,使用基板转移机械手卸载基板;第一值获取步骤,在基板被卸载时获取第一值;以及第一校正步骤,在第一参考值和第一值彼此不同时,将第一值校正为基板转移机械手的第二参考值。
22.在一个实施例中,基板转移装置可以包括:腔室,该腔室包括基座,至少一个基板被安置在该基座中;基板转移机械手,该基板转移机械手被配置为将基板装载至基座中或将基板从基座卸载;基板位置感测单元,该基板位置感测单元被配置为在基板被装载至腔室中或基板从腔室被卸载时感测基板的位置;储存单元,该储存单元被配置为储存由基板位置感测单元感测到的基板的位置;以及控制单元,该控制单元被配置为使用关于基板的位置的信息来控制基板转移机械手以将所基板安置在基座的第一位置处。
23.有益效果
24.当请求参考值设定操作时,根据本公开的实施例的基板转移方法和装置可以在设定用于装载或卸载基板的初始参考值之后,由于过程或硬件的变化而自动执行设定新的参考值的操作。因此,即使不手动改变基板转移机械手的参考值,基板转移方法和设备也可以转移基板使得基板被定位在基座的中心。
25.结果,基板可以准确地定位在腔室中的基座的中心,而不会出现取决于工程师的技能水平的误差或取决于环境变化为真空状态或高温状态的误差。
附图说明
26.图1是示出传统的集群型基板处理装置的示意性配置的平面图。
27.图2是图1所示的集群型基板处理装置的侧横截面图。
28.图3是示出根据本公开的实施例的基板转移方法的流程图。
29.图4是示出根据本公开的另一个实施例的基板转移方法的流程图。
30.图5是示出根据本公开的实施例的基板转移装置的配置的示意图。
31.图6是用于描述根据本公开的实施例的基板转移装置中的基板的位置感测原理的视图。
32.图7是用于描述根据本公开的实施例的基板转移装置中的基板的位置感测原理的视图。
具体实施方式
33.在下文中,将参考附图详细描述本公开的示例性实施例。本说明书和权利要求书中使用的术语不应被解释为受限于典型的和字典的含义,而应被解释为与本公开的技术事项相一致的含义和概念。
34.在本说明书中描述的实施例和附图中所示的部件是本公开的优选实施例,而不代表本公开的全部技术思想。因此,在提交本技术时,可以存在能够替代本实施例的各种等同物和修改。
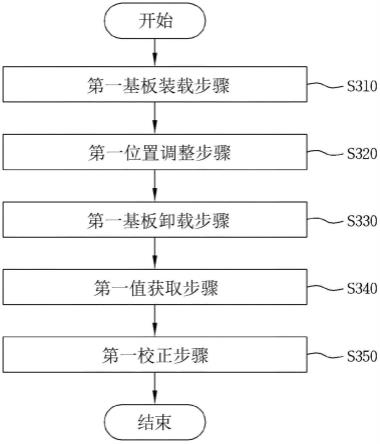
35.图3是示出根据本公开的实施例的基板转移方法的流程图。
36.参考图3,根据本公开的实施例的基板转移方法包括:第一基板装载步骤s310、第一位置调整步骤s320、第一基板卸载步骤s330、第一值获取步骤s340、以及第一校正步骤s350。
37.第一基板装载步骤s310包括:通过使用第一参考值将基板w装载至腔室110内的基座中,该第一参考值用作在基板转移机械手120将基板w装载至基座中或从基座中卸载基板w时的参考值。此时,第一参考值用作在基板转移机械手根据设计值而装载或卸载基板w时的参考值。
38.第一位置调整步骤s320包括:调整装载在基座中的基板w的位置,使得基板被定位在基座的第一位置处。此时,第一位置可以被设定为基座的中心。具体地,可以调整基板的位置,使得基板w被定位在基板安置槽(未示出)的中心。
39.尽管根据作为设计值的第一参考值基板转移机械手将基板w装载至腔室内的基座中,但是由于硬件中的各种因素,基板w可能无法准确地定位在基座的中心。因此,需要将基
板w定位在基座的中心的对中过程(centering process)。
40.第一基板卸载步骤s330包括:通过使用基板转移机械手,根据第一参考值将基板从腔室内的基座卸载。由于在第一位置调整步骤s320中执行了将基板定位在基座的中心的单独操作,因此基板被定位在基座中心的与第一参考值不同的位置处。因此,当在第一基板卸载步骤s130中根据第一参考值而卸载基板时,基板被卸载同时被放置在与基板转移机械手的基板安置单元错位(dislocate)的位置处,而不是常规位置。
41.第一值获取步骤s340包括:在卸载基板时通过基板位置感测单元感测相对于第一参考值的基板的错位量,以及获取在卸载基板时作为位置信息的第一值。
42.在第一值获取步骤s340中,可以对在从基座卸载基板时由基板位置感测单元感测到的基板的长度进行测量,并且将该基板的长度与在根据第一参考值而装载基板时由基板位置感测单元感测到的基板的长度进行比较,以便获取第一值,该第一值为在基板被卸载时的位置信息。
43.在第一值获取步骤s340中,可以对在从基座卸载基板时由基板位置感测单元感测到基板的时间进行测量,并且将该时间与在根据第一参考值而装载基板时由基板位置感测单元感测到基板的时间进行比较,以便获取第一值,该第一值为在基板被卸载时的位置信息。
44.第一校正步骤s350包括:将第一值和第一参考值进行比较,并且当第一值和第一参考值彼此不同时,将第一值校正为第二参考值,该第二参考值为基板转移机械手的新参考值。
45.即,由基板位置感测单元感测到的、基板从基板转移机械手的错位量被用于设定第二参考值,并且第二参考值被用于控制基板转移机械手。
46.即使在根据设计值设定第一参考值之后因在硬件组装过程中的误差而导致参考值发生变化时,图3的基板转移方法也能自动地校正参考值。因此,即使不手动改变基板转移机械手的参考值,也能够转移基板以使基板被定位在基座的中心。
47.图4是示出根据本公开的另一个实施例的基板转移方法的流程图。
48.参考图4,根据本公开的另一个实施例的基板转移方法包括:第二基板装载步骤s410、第二位置调整步骤s420、第二基板卸载步骤s430、第二值获取步骤s440、以及第二校正步骤s450。
49.第二基板装载步骤s410包括:使用第二参考值将基板装载至基座中。此时,第二参考值可以是根据在图3所示的基板转移方法的第一校正步骤s350中校正的值而在装载或卸载基板时用作参考值的值。另一方面,第二参考值可以是在基板转移机械手根据初始设计值而装载或卸载基板时用作参考值的值。
50.第二位置调整步骤s420包括:调整装载在基座中的基板的位置,使得基板被定位在基座的第二位置处。此时,第二位置可以被设定为基座的中心。具体地,可以调整基板的位置,使得基板被定位在基板安置槽(未示出)的中心。
51.尽管根据第二参考值基板转移机械手将基板w装载至腔室内的基座中,但是,当腔室被真空抽吸或加热时,基板可能不被准确地定位在基座的中心。因此,需要将基板w定位在基座的中心的对中过程。
52.第二基板卸载步骤s430包括:通过使用基板转移机械手,根据第二参考值将基板
从腔室内的基座卸载。由于在第二位置调整步骤s420中执行了将基板定位在基座的中心的单独操作,因此基板被定位在基座的中心的与第二参考值不同的位置处。因此,当在第二基板卸载步骤s430中根据第二参考值卸载基板时,基板被卸载同时被放置在与基板转移机械手的基板安置单元错位的位置处,而不是常规位置处。
53.第二值获取步骤s440包括:在卸载基板时通过基板位置感测单元感测相对于第二参考值的基板的错位量,并且在卸载基板时获取作为位置信息的第二值。
54.在第二值获取步骤s440中,可以对在从基座卸载基板时由基板位置感测单元感测到的基板的长度进行测量,并且将该基板的长度与在根据第二参考值装载基板时由基板位置感测单元感测到的基板的长度进行比较,以便获取第二值,该第二值为在基板被卸载时的位置信息。
55.在第二值获取步骤s440中,可以对在从基座卸载基板时由基板位置感测单元感测到基板的时间进行测量,并且将该时间与在根据第二参考值而装载基板时由基板位置感测单元感测到基板的时间进行比较,以便获取第二值,该第二值为在基板被卸载时的位置信息。
56.第二校正步骤s450包括:将第二值和第二参考值进行比较,并且当第二值和第二参考值彼此不同时,将第二值校正为第三参考值,该第三参考值为基板转移机械手的新参考值。
57.即,由位置感测单元感测到的、基板从基板转移机械手的错位量被用于设定第三参考值,并且第三参考值被用于控制基板转移机械手。
58.图4的基板转移方法可以在大气状态下根据设计值而设定参考值,并且然后,即使在由真空抽吸过程和加热过程改变参考值时,也能自动校正参考值,使得基板能够在没有由于环境变化而造成的误差的情况下被转移。
59.图5是示出根据本公开的实施例的基板转移装置的配置的示意图,并且图6和图7是用于描述根据本公开的实施例的基板转移装置中的基板的位置感测原理的视图。
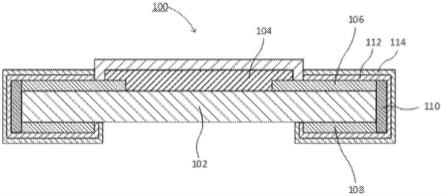
60.如图5所示,根据本公开的实施例的基板转移装置100包括:腔室110、基板转移机械手120、基板位置感测单元130、储存单元(未示出)、以及控制单元(未示出)。
61.腔室110可以是装载锁定腔室、转移腔室或处理腔室。期望地,腔室110可以被配置为用于处理基板的处理腔室。处理腔室用作执行处理的空间,并且处理所需的气体被引入处理腔室。如果需要,可以执行真空抽吸过程、加热过程或等离子体处理。
62.腔室110包括:安装于该腔室中的基板支撑单元111、以及被定位在基板支撑单元111的顶部处的基座112,该基座112具有被定位在其中的基板。
63.基板转移机械手120将基板w装载至腔室110内的基座112中或将基板w从腔室110内的基座112卸载。
64.基板位置感测单元130被安装在腔室110的入口处,基板转移机械手120通过该入口进入和退出,并且,在由基板转移机械手120将基板w装载至腔室110内的基座112中时和在将基板w从腔室110内的基座112卸载时,基板位置感测单元130感测基板w的位置。
65.储存单元(未示出)储存由基板位置感测单元130感测的基板的位置,而控制单元(未示出)使用关于基板的位置的信息来控制基板转移机械手120的运动。
66.基板转移机械手120包括:主体121、沿着主体抬升或下放的抬升/下放模块122、连
接至抬升/下放模块122的机械手臂123、以及连接至机械手臂123的端部的基板安置单元124。根据由基板位置感测单元130感测到的基板的位置信息来控制基板转移机械手120。具体地,机械手臂123的转动量和伸展量可以被控制。
67.参考图6,基板位置感测单元130可以包括光发射器131和光接收器132。当基板w2在光发射器131与光接收器132之间穿过时,基板位置感测单元130可以对在来自光发射器131的光没有被传输至光接收器132期间的时间进行测量,并且将所测量的时间与基于初始参考值的时间进行比较,从而感测基于x轴坐标值和y轴坐标值的基板w2的位置。然后,基板位置感测单元130可以使用感测到的位置来感测基板的错位量。
68.基板位置感测单元130可以测量基板的长度(通过该长度,来自光发射器131的光通过基板没有被传输至光接收器132),即,基于基板位置感测单元130的感测区域sa的长度,而不是测量来自光发射器131的光没有被传输至光接收器132的时间,并且将所测量的长度与预设参考长度进行比较,从而感测基板的错位量。
69.到目前为止,已经描述了基板位置感测单元130包括光发射器和光接收器,并且使用了用于感测被定位在光发射器与光接收器之间的目标物体的传感器。然而,本实施例不限于此,而是可以使用能够测量目标物体的位置的各种传感器。
70.与作为基于设计值的初始参考值的第一参考值相比较,基板的错位量可以表示:基板w在(被设定为与腔室110的入口平行的第一水平方向的)x轴方向上和(被设定为与x轴方向垂直的第二水平方向的)y轴方向上的错位量。
71.图7(a)示出了:根据第一参考值而将基板w1定位在基板位置感测单元130的x轴感测参考线l
x
和y轴感测参考线ly上的常规位置处。另一方面,图7(b)示出了:与在常规位置处的基板w1相比,基板w2在x轴方向上错位了1.0mm并且在y轴方向上错位了1.5mm。
72.如图7(b)所示,当与在常规位置处的基板w1相比基板w2在x轴方向上错位了1.0mm并且在y轴方向上错位了1.5mm时,在x轴方向上的1.0mm的错位量可以被反映以校准x轴,使得基板转移机械手120的转动角度θ向右移动一点。然后,考虑改变的转动角度θ,并且在y轴方向上的1.5mm的错位量被反映为改变基板转移机械手120的机械手臂的伸长量d,以便校准y轴。
73.即,通过根据在x轴方向上的1.0mm的错位量而调整机械手臂123的转动角度θ来校正x轴坐标值以及根据在y轴方向上的1.5mm的错位量而调整机械手臂123的伸长量d来校正y轴坐标值,控制单元(未示出)可以获取第二参考值作为新的参考值,以及然后通过使用第二个参考值作为新的参考值来校正基板转移机械手的参考值。
74.如上所述,当在根据设计值而设定参考值之后,由于过程或硬件的改变而需要设定新的参考值的操作时,可以自动地执行参考值设定操作。因此,尽管基板转移机械手的参考值没有被手动地改变,但是基板也可以被转移,以便被定位在基座的中心。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。