技术特征:
1.一种插入良好度判定器,是判定插入至设置于作业对象物的孔的插入部件向该孔的插入的良好度的判定器,其特征在于,所述插入部件至少具有:头部,其具有无法插入至所述孔的大小;和柱状的躯干部,其从所述头部延伸并具有能够插入至所述孔的粗细,所述判定器构成为,基于在与所述孔的延伸方向正交的方向上的插入至所述孔的插入部件的所述头部的预定部位的位置,来判定所述插入的良好度。2.根据权利要求1所述的插入良好度判定器,其特征在于,基于在与所述孔的延伸方向正交的方向上的插入至所述孔的插入部件的所述头部的预定部位的位置来判定所述插入的良好度是:基于在与所述孔的延伸方向正交的方向上的插入至所述孔的插入部件的所述头部的预定部位的尺寸的分布或者位置距基准位置的偏差来判定所述插入的良好度。3.根据权利要求2所述的插入良好度判定器,其特征在于,基于在与所述孔的延伸方向正交的方向上的插入至所述孔的插入部件的所述头部的预定部位的位置来判定所述插入的良好度是:基于在与所述孔的延伸方向正交的方向上的插入至所述孔的插入部件的所述头部的预定部位的尺寸的分布来判定所述插入的良好度,插入至所述孔的插入部件的所述头部的预定部位是通过所述头部的外周以及沿着该外周延伸的凸部或者凹部规定的带状的部位,所述预定部位的尺寸分布是所述带状的部位的在延伸方向上的宽度尺寸的分布。4.根据权利要求2所述的插入良好度判定器,其特征在于,基于在与所述孔的延伸方向正交的方向上的插入至所述孔的插入部件的所述头部的预定部位的位置来判定所述插入的良好度是:基于在与所述孔的延伸方向正交的方向上的插入至所述孔的插入部件的所述头部的预定部位的尺寸的分布来判定所述插入的良好度,插入至所述孔的插入部件的所述头部的预定部位是沿着周向延伸的环状且带状的部位,所述预定部位的尺寸分布是所述带状的部位的在延伸方向上的宽度尺寸的分布。5.根据权利要求3或4所述的插入良好度判定器,其特征在于,构成为基于所述带状的部位的在延伸方向上的宽度尺寸的分布的离散来判定所述插入的良好度。6.根据权利要求3或4所述的插入良好度判定器,其特征在于,构成为基于所述带状的部位的在延伸方向上的宽度尺寸的分布的平均值来判定所述插入的良好度。7.根据权利要求2~6中任一项所述的插入良好度判定器,其特征在于,在与所述孔的延伸方向正交的方向上的插入至所述孔的插入部件的所述头部的预定部位的尺寸是:从所述孔的延伸方向拍摄插入至所述孔的插入部件而得的拍摄图像中的被插入的所述插入部件的所述头部的预定部位的尺寸。8.根据权利要求2~5中任一项所述的插入良好度判定器,其特征在于,具备:拍摄数据获取部,其获取表示从所述孔的延伸方向拍摄插入至所述孔的插入部件而得的拍摄图像的拍摄数据;和
判定部,其基于所述拍摄数据获取部所获取到的所述拍摄数据,计算所述插入部件的所述头部的预定部位的尺寸分布,并基于计算出的所述预定部位的尺寸分布,判定所述插入的良好度。9.根据权利要求2所述的插入良好度判定器,其特征在于,基于在与所述孔的延伸方向正交的方向上的插入至所述孔的插入部件的所述头部的预定部位的位置来判定所述插入的良好度是:基于在与所述孔的延伸方向正交的方向上的插入至所述孔的插入部件的所述头部的预定部位的位置距基准位置的偏差来判定所述插入的良好度,插入至所述孔的插入部件的所述头部的预定部位是所述头部的外周或者沿着所述头部的外周延伸的环状的凸部或者凹部,所述预定部位的基准位置是从所述插入部件的设计数据获取到的所述预定部位的位置、或者是在所述插入部件没有插入至所述孔的状态下从所述躯干部的延伸方向观察的所述预定部位的位置。10.根据权利要求2或9所述的插入良好度判定器,其特征在于,具备:位置数据获取部,其获取表示插入至所述孔的插入部件的所述头部的预定部位的位置的位置数据;存储部,其存储所述基准位置;以及判定部,其基于所述位置数据获取部所获取到的所述位置数据和存储于所述存储部的所述基准位置,计算所述插入部件的所述头部的预定部位的位置距基准位置的偏差,并基于计算出的所述预定部位距基准位置的偏差,判定所述插入的良好度。11.根据权利要求1~10中任一项所述的插入良好度判定器,其特征在于,所述插入部件是粘弹性体,所述躯干部粘弹性地缩径而插入至所述孔,由此所述头部变形。12.根据权利要求11所述的插入良好度判定器,其特征在于,所述插入部件在所述躯干部的末端具有比该躯干部粗的防脱部。13.根据权利要求11或12所述的插入良好度判定器,其特征在于,所述插入部件是衬垫或者橡胶栓。14.根据权利要求1~10中任一项所述的插入良好度判定器,其特征在于,所述孔是螺孔,所述插入部件是螺纹部件。15.一种插入良好度判定装置,其特征在于,具备:拍摄器,其拍摄将插入至所述孔的插入部件从所述孔的延伸方向观察的拍摄图像,并输出表示拍摄到的拍摄图像的拍摄数据;和权利要求1~14中任一项所述的插入良好度判定器,所述判定器构成为,基于从所述拍摄器输出的拍摄数据,获取在与所述孔的延伸方向正交的方向上的插入至所述孔的插入部件的所述头部的预定部位的位置。16.一种机器人系统,其特征在于,具备:机器人,其具备机器人臂,所述机器人臂具有将所述插入部件插入所述作业对象的所
述孔的末端执行器;和权利要求15所述的插入良好度判定装置,所述拍摄器设置于所述末端执行器、所述机器人臂或者除所述机器人以外的物体。17.一种插入良好度判定方法,是判定插入至设置于作业对象物的孔的插入部件向该孔的插入的良好度的判定方法,其特征在于,所述插入部件至少具有:头部,其具有无法插入至所述孔的大小;和柱状的躯干部,其从所述头部延伸,并具有能够插入至所述孔的粗细,所述判定方法包括如下工序:基于在与所述孔的延伸方向正交的方向上的插入至所述孔的插入部件的所述头部的预定部位的位置,来判定所述插入的良好度。
技术总结
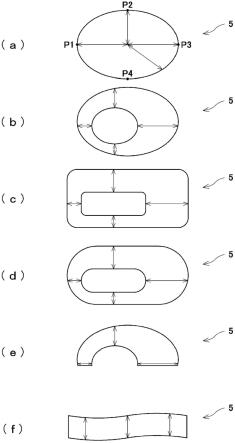
插入良好度判定器是判定插入至设置于作业对物的孔的插入部件(5)向该孔的插入的良好度的判定器(1),插入部件(5)至少具有:头部,其具有无法插入至孔的大小;和柱状的躯干部,其从头部延伸并具有能够插入至孔的粗细,判定器构成为基于在与孔的延伸方向正交的方向上的插入至孔的插入部件(5)的头部的预定部位(P1~P4)的位置,来判定插入的良好度。来判定插入的良好度。来判定插入的良好度。
技术研发人员:庄司匡志 铃木敏幸 岳志江
受保护的技术使用者:川崎重工业株式会社
技术研发日:2021.02.17
技术公布日:2022/8/19
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。