1.本发明属于桥梁预应力施工技术领域,具体涉及一种自行式可升降、旋转负弯矩张拉施工装置及方法。
背景技术:
2.随着国家基础建设快速的发展,对施工生产中质量管理、安全管理均有了新的要求和高的标准,对项目管理也提出新要求,精细化管理、微创微改等技术创新活动,就是对施工过程中要不满足于现状,要深入发掘,创新发明,打破常规,为施工一线做好服务,以更安全、更科学、更高效来保安全、保质量、保效益。
3.在桥梁施工过程中,梁体内预应力工序成为梁的骨架,是梁体结构的重要组成部分,是实现梁体大跨度的重要依据,是确保行车、行人及财产安全的重要保证,而在梁体架设完成后,负弯矩施工成为最大安全风隐患点,梁下作业空间狭小,作业设备沉重,每施工一处就需作业人员及设备转移一次,耗时耗力,效率低下,特别是安全方面,由于桥梁基本都是高墩大跨,位于山高沟深位置,作业面距地面均在二三十米以上,最高达六十余米,从桥下搭设支架造价成本过高,从桥面上设置吊笼,受限于湿接缝55cm的宽度限制,不能设置现有的各类吊笼设备,安全风险隐患极大,高空作业对人、对物均形成了高风险隐患点。
技术实现要素:
4.有鉴于此,本发明的主要目的在于提供一种自行式可升降、旋转负弯矩张拉施工装置及方法。
5.为达到上述目的,本发明的技术方案是这样实现的:
6.本发明实施例提供一种自行式可升降、旋转负弯矩张拉施工装置,该装置包括主行台车、辅助台车、主行横移机构、竖向升降主臂、旋转机构、辅助横移机构、加紧机构、竖向升降辅臂、主横梁机构、升降作业小车;
7.所述主行台车、辅助台车分别设置在桥面梁体的两侧,用于沿桥面的纵向移动;
8.所述主行横移机构设置在主行台车的顶部,所述辅助横移机构设置在辅助台车的顶部,用于将调整竖向升降主臂、竖向升降辅臂之间与梁体的宽度;
9.所述竖向升降主臂设置在主行横移机构的外侧,用于调整主横梁机构的高度;
10.所述竖向升降主臂的下端通过旋转机构与主横梁机构的一侧连接,用于调整主横梁机构的旋转位置;
11.所述竖向升降辅臂设置在辅助横移机构的外侧,用于调整主横梁机构的高度;
12.所述主横梁机构一侧与旋转机构固定连接,另一侧与竖向升降辅臂下端的加紧机构配合连接,用于为升降作业小车提供作业平台;
13.所述升降作业小车配合设置在主横梁机构上,用于对桥面梁体进行负弯矩张拉作业。
14.上述方案中,所述主行台车的底部设置有主车驱动机构,所述主行台车靠近内侧
的一侧设置有主车配重块用于保持整个装置的平衡,所述主行台车上设置主车控制器,所述主车控制器分别与主行横移机构、竖向升降主臂、旋转机构、主车驱动机构连接,用于调整其工作状态。
15.上述方案中,所述辅助台车的底部设置有辅车驱动机构,所述辅助台车靠近内侧的一侧设置有辅车配重块用于保持整个装置的平衡,所述辅助台车上设置辅车控制器,所述辅车控制器分别与辅助横移机构、竖向升降辅臂、辅车控制器连接,用于调整其工作状态。
16.上述方案中,所述主横梁机构包括钢套箱、主横梁、主横梁辅臂、伸缩驱动机构,所述钢套箱套设在主横梁外部并且两者配合连接,用于主横梁在钢套箱移动,所述钢套箱与旋转机构固定连接,所述主横梁辅臂的一侧设置在主横梁靠近竖向升降辅臂的一侧并且通过伸缩驱动机构与主横梁配合连接,所述主横梁辅臂的另一侧与加紧机构配合连接。
17.上述方案中,所述伸缩驱动机构第二驱动马达、定位套箱、第一传动齿条,所述主横梁辅臂上设置第一传动齿条,所述定位套箱设置在主横梁的下侧,所述主横梁辅臂贯穿在定位套箱内,在所述定位套箱设置有缺口的位置对应设置第二驱动马达,所述第二驱动马达上的齿轮与第一传动齿条啮合,用于伸缩主横梁。
18.上述方案中,所述旋转机构包括横梁连接主轴、第一驱动马达、主轴齿轮、连接法兰,所述横梁连接主轴的上端与竖向升降主臂的底部活动连接,下端与连接法兰固定连接,所述连接法兰与钢套箱固定连接,所述第一驱动马达设置两个分别位于横梁连接主轴的两侧,所述横梁连接主轴上套设主轴齿轮,两个所述第一驱动马达的输出端分别设置驱动齿轮,两个所述驱动齿轮均与主轴齿轮啮合,用于驱动横梁连接主轴旋转。
19.上述方案中,所述加紧机构包括液压油缸、主夹紧杆、连接杆件、滚动滑轮,所述主夹紧杆的上端与竖向升降辅臂连接,所述液压油缸的输出端与连接杆件的中心位置铰接,所述连接杆件的两侧分别与主夹紧杆的两侧铰接,所述主夹紧杆下部的内侧面分别设置滚动滑轮,两个所述滚动滑轮用于夹紧主横梁辅臂的另一侧。
20.本发明实施例还提供一种用于如上述方案中任意一项所述的自行式可升降、旋转负弯矩张拉施工装置的负弯矩张拉作业方法,其特征在于,该方法通过以下步骤实现:
21.步骤1:控制主行台车、辅助台车行走至作业区域停止,主行台车和辅助台车分别位于桥面两侧;
22.步骤2:通过主行台车、辅助台车顶部的主行横移机构、辅助横移机构,将主横梁逐步向梁体外侧走行,走行到位后锁定;
23.步骤3:通过竖向升降主臂、竖向升降辅臂将主横梁下落至工作高度,下落到位后锁定;
24.步骤4:通过旋转机构转动,使主横梁旋转90度,与梁体形成垂直关系;
25.步骤5:所述主横梁旋转到位后,主横梁辅臂继续向前伸出,延伸至桥面另一侧,辅助台车的竖向升降辅臂下端的加紧机构将其卡住、加紧、提拉;
26.步骤6:所述主横梁继续伸长,直至主横梁全部位于梁面下方;
27.步骤7:所述升降作业小车移动至作业面正下方后停止,升至作业面;
28.步骤8:所述升降作业小车进行负弯矩张拉作业;
29.步骤9:同一排负弯矩张拉完成后,主行台车、辅助台车同时行走至下一排位置,继
续施工。
30.与现有技术相比,本发明的有益效果:
31.1、施工安全可靠,本发明为系统型负弯矩张拉操作设备,各作业环节均设有专门操作平台,整个作业工程基本实现自动化,确保作业人员、设备的安全,消除了高空作业人员的安全风险。
32.2、作业功效提升,本发明为可自行、可升降、可旋转自动化装置,从人员、张拉设备的横向移动,到整车前后行走,均可实现自动化,大大减少了人员、设备转场时间消耗,张拉作业时若人工吊篮施工,每跨需转场15次,而本发明仅需移动3次,就可完成整跨的张拉作业.
33.3、自动化程度高,本发明多处采用液压设备、电动设备,由总控主机进行控制操作,操作简便,易学易懂。
附图说明
34.此处所说明的附图用来公开对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
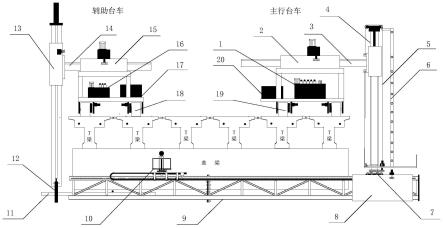
35.图1为本发明实施例一种自行式可升降、旋转负弯矩张拉施工装置的结构示意图;
36.图2为本发明实施例一种自行式可升降、旋转负弯矩张拉施工装置中旋转机构的结构示意图;
37.图3为本发明实施例一种自行式可升降、旋转负弯矩张拉施工装置中滑动机构的结构示意图;
38.图4为本发明实施例一种自行式可升降、旋转负弯矩张拉施工装置中夹紧机构的结构示意图;
39.图5为本发明实施例一种自行式可升降、旋转负弯矩张拉施工装置中主横梁机构的结构示意图;
40.图6为本发明实施例一种自行式可升降、旋转负弯矩张拉施工装置在作业前的主行台车侧的侧面示意图;
41.图7为本发明实施例提供一种自行式可升降、旋转负弯矩张拉施工装置的负弯矩张拉作业方法中步骤1状态的结构示意图;
42.图8为本发明实施例提供一种自行式可升降、旋转负弯矩张拉施工装置的负弯矩张拉作业方法中步骤3状态的结构示意图;
43.图9为本发明实施例提供一种自行式可升降、旋转负弯矩张拉施工装置的负弯矩张拉作业方法中步骤4状态的结构示意图;
44.图10为本发明实施例提供一种自行式可升降、旋转负弯矩张拉施工装置的负弯矩张拉作业方法中步骤5状态的结构示意图;
45.图11为本发明实施例提供一种自行式可升降、旋转负弯矩张拉施工装置的负弯矩张拉作业方法中步骤6状态的结构示意图;
46.图12为本发明实施例提供一种自行式可升降、旋转负弯矩张拉施工装置的负弯矩张拉作业方法中步骤7状态的结构示意图;
47.图13为本发明实施例提供一种自行式可升降、旋转负弯矩张拉施工装置的负弯矩
张拉作业方法中步骤8状态的结构示意图。
具体实施方式
48.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
49.本实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
50.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、物品或者装置中还存在另外的相同要素。
51.本发明实施例一种自行式可升降、旋转负弯矩张拉施工装置,如图1-6所示,该装置包括主行台车、辅助台车、主行横移机构2、竖向升降主臂4、旋转机构7、辅助横移机构15、加紧机构12、竖向升降辅臂13、主横梁机构、升降作业小车10;
52.所述主行台车、辅助台车分别设置在桥面梁体的两侧,用于沿桥面的纵向移动;
53.所述主行横移机构2设置在主行台车的顶部,所述辅助横移机构15设置在辅助台车的顶部,用于将调整竖向升降主臂4、竖向升降辅臂13之间与梁体的宽度;
54.所述竖向升降主臂4设置在主行横移机构2的外侧,用于调整主横梁机构的高度;
55.所述竖向升降主臂4的下端通过旋转机构7与主横梁机构的一侧连接,用于调整主横梁机构的旋转位置;
56.所述竖向升降辅臂13设置在辅助横移机构15的外侧,用于调整主横梁机构的高度;
57.所述主横梁机构一侧与旋转机构7固定连接,另一侧与竖向升降辅臂13 下端的加紧机构12配合连接,用于为升降作业小车10提供作业平台;
58.所述升降作业小车10配合设置在主横梁机构上,用于对桥面梁体进行负弯矩张拉作业。
59.在作业之前,所述主横梁机构与竖向升降辅臂13下端的加紧机构12并不连接,而且如图11所示,在主行横移机构2伸出的情况下,主横梁机构平行于桥面梁体的纵向,这样便于快速移动到作业区域。
60.在作业之前的准备工作期间,所述竖向升降辅臂13先将主横梁机构下降到作业高度,然后所述主横梁机构在旋转机构7作用下,将其旋转90度,之后,主横梁机构的另一侧与竖向升降辅臂13下端的加紧机构12连接,最后,所述主横梁机构向竖向升降辅臂13方向移动,使得桥面梁体横跨在主横梁机构上方。
61.在作业时,升降作业小车10升至作业面,所述升降作业小车10上设置千斤顶放置平台,平台可四个方向滑动,让千斤顶与钢绞线正确穿束,并完成张拉作业。
62.所述竖向升降主臂4上绕设有安全绳5,并且外侧设置有用于人员攀爬的爬梯6。
63.所述主行台车的底部设置有主车驱动机构19,所述主行台车靠近内侧的一侧设置有主车配重块20用于保持整个装置的平衡,所述主行台车上设置主车控制器1,所述主车控制器1分别与主行横移机构2、竖向升降主臂4、旋转机构 7、主车驱动机构19连接,用于调整其工作状态。
64.所述辅助台车的底部设置有辅车驱动机构18,所述辅助台车靠近内侧的一侧设置有辅车配重块17用于保持整个装置的平衡,所述辅助台车上设置辅车控制器16,所述辅车控制器16分别与辅助横移机构15、竖向升降辅臂13、辅车控制器16连接,用于调整其工作状态。
65.所述主横梁机构包括钢套箱8、主横梁9、主横梁辅臂11、伸缩驱动机构,所述钢套箱8套设在主横梁9外部并且两者配合连接,用于主横梁9在钢套箱 8移动,所述钢套箱8与旋转机构7固定连接,所述主横梁辅臂11的一侧设置在主横梁9靠近竖向升降辅臂13的一侧并且通过伸缩驱动机构与主横梁9配合连接,所述主横梁辅臂11的另一侧与加紧机构12配合连接。
66.在作业之前,一般来说,所述主横梁9的中心位置移动到钢套箱8,这样,能够保持整个装置的重心稳定。
67.在作业准备期间,下降到合适高度后,通过伸缩驱动机构将主横梁辅臂11 伸出到夹紧机构12后,在夹紧机构12的夹紧作用下,通过伸缩驱动机构将整个主横梁9逐步向竖向升降辅臂13移动,最后,所述钢套箱8基本处于主横梁 9的左右侧了。
68.所述伸缩驱动机构第二驱动马达111、定位套箱112、第一传动齿条113,所述主横梁辅臂11上设置第一传动齿条113,所述定位套箱112设置在主横梁 9的下侧,所述主横梁辅臂11贯穿在定位套箱112内,在所述定位套箱112设置有缺口的位置对应设置第二驱动马达111,所述第二驱动马达111上的齿轮与第一传动齿条113啮合,用于伸缩主横梁9。
69.所述钢套箱8通过滑动机构与主横梁9配合连接。
70.所述滑动机构包括第三驱动马达81、第二传动齿条82,所述第二传动齿条 82设置在主横梁9的上侧,所述第三驱动马达81设置在钢套箱8上并且输出端的齿轮与第二传动齿条82啮合
71.在主横梁辅臂11没有被夹紧机构12夹紧时,所述第二驱动马达111顺时针转动,在第一传动齿条113的配合下,所述主横梁辅臂11向主横梁辅臂11 伸出,使其贯穿夹紧机构12,之后,夹紧机构12将其一部分夹紧,使其无法上下移动,这时,钢套箱8、主横梁9之间的伸缩机构动作,将主横梁9向竖向升降辅臂13移动,移动到位后,所述第二驱动马达111逆时针转动,将多出的主横梁辅臂11收回。
72.所述旋转机构7包括横梁连接主轴71、第一驱动马达72、主轴齿轮73、连接法兰74,所述横梁连接主轴71的上端与竖向升降主臂4的底部活动连接,下端与连接法兰74固定连接,所述连接法兰74与钢套箱8固定连接,所述第一驱动马达72设置两个分别位于横梁连接主轴71的两侧,所述横梁连接主轴 71上套设主轴齿轮73,两个所述第一驱动马达72的输出端分别设置驱动齿轮,两个所述驱动齿轮均与主轴齿轮73啮合,用于驱动横梁连接主轴71
旋转。
73.所述加紧机构12包括液压油缸121、主夹紧杆122、连接杆件123、滚动滑轮124,所述主夹紧杆122的上端与竖向升降辅臂13连接,所述液压油缸121 的输出端与连接杆件123的中心位置铰接,所述连接杆件123的两侧分别与主夹紧杆122的两侧铰接,所述主夹紧杆122下部的内侧面分别设置滚动滑轮 124,两个所述滚动滑轮124用于夹紧主横梁辅臂11的另一侧。
74.本发明实施例还提供一种自行式可升降、旋转负弯矩张拉施工装置的负弯矩张拉作业方法,该方法通过以下步骤实现:
75.如图7所示,步骤1:控制主行台车、辅助台车行走至作业区域停止,主行台车和辅助台车分别位于桥面两侧;
76.如图8所示,步骤2:通过主行台车、辅助台车顶部的主行横移机构2、辅助横移机构15,将主横梁9逐步向梁体外侧走行,走行到位后锁定;
77.如图9所示,步骤3:通过竖向升降主臂4、、竖向升降辅臂13将主横梁9 下落至工作高度,下落到位后锁定;
78.如图10所示,步骤4:通过旋转机构7转动,使主横梁9旋转90度,与梁体形成垂直关系;
79.如图11所示,步骤5:所述主横梁9旋转到位后,主横梁辅臂11继续向前伸出,延伸至桥面另一侧,辅助台车的竖向升降辅臂13下端的加紧机构12 将其卡住、加紧、提拉;
80.如图12所示,步骤6:所述主横梁9继续伸长,直至主横梁全部位于梁面下方;
81.如图13所示,步骤7:所述升降作业小车10移动至作业面正下方后停止,升至作业面;
82.步骤8:所述升降作业小车10进行负弯矩张拉作业;
83.步骤9:同一排负弯矩张拉完成后,主行台车、辅助台车同时行走至下一排位置,继续施工。
84.以上所述,仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
