1.本发明属于农机具技术领域,具体涉及一种不稳定运动状态下可自动补偿的水平竖直姿态保持装置。
背景技术:
2.智能农机具是目前在发展的重要课题,例如能够根据田地里的情况进行自动除草的机械设备中摄像头是用来拍摄田地里的情况,但是农机具在田间工作是,运动是不稳定的,运动状态是变化的,导致摄像头悬挂机构的运动状态不断变化,偏移倾斜,导致装置的重心不断变化;摄像头的固定点要在重心与固定转动圆心处于同一垂直线,摄像头才能正向下;运动中,固定点是无法随重心变化而调整,因此,根据机构姿态传感器的参数,按照设计好的目标状态,通过程序判断,驱动机电部件,改变机构的各部件间的相对位置,从而调整运动中的机构的重心位置,使之满足设计需要,保证摄像头的姿态稳定是目前需要解决的一个技术问题。
技术实现要素:
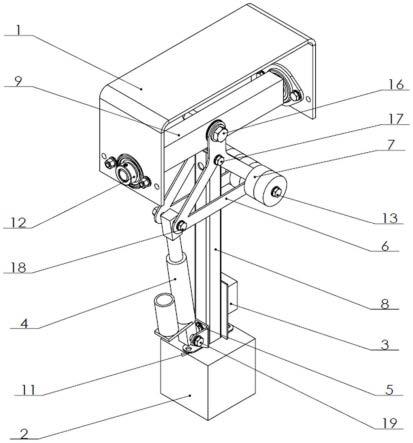
3.为了解决上述问题,本发明提出了一种不稳定运动状态下可自动补偿的水平竖直姿态保持装置,主要包括:支架1、姿态传感器3、电动伸缩缸4、平衡配重连扳6、垂轴8和方轴 9;
4.支架1为门型结构,其与方轴9两端的轴通过轴承ⅰ12连接,方轴9中部开有中间孔;
5.平衡配重连扳6的结构为一个等腰的三角形,顶角上方设有长边与方轴9中部开有中间孔铰接,并且在顶角处与垂轴8铰接在一起;垂轴8下端固定有电缸固定耳10,电动伸缩缸 4电机一端与电缸固定耳10铰接在一起,电动伸缩缸4的伸缩杆一端通过电缸伸出转轴18 铰接在平衡配重连扳6底角处,配重体7固定安装在平衡配重连扳6另一个底角处;摄像头 2安装在垂轴8下方;
6.姿态传感器3固定在垂轴8上;用于采集垂轴8在xz平面与z轴的夹角角度,plc对姿态传感器3的角度数据进行延时采集,采集数据若大于设定阈值,驱动电动伸缩缸4的电机正转,或者采集数据若小于负的设定阈值,驱动电动伸缩缸4的电机反转,由电机的正转或反转驱动电动伸缩缸4的伸长和缩短,使垂轴8与z轴重合;若负的阈值≤采集数据≤阈值,则重新计时,进行延时采集。
7.平衡配重连扳6顶角处开有孔ⅰ垂轴8的上端放入两片平衡配重连扳6中间,垂轴8上端的通孔与平衡配重连扳6的孔ⅰ对齐,并通过垂轴固定转轴17铰接在一起;
8.平衡配重连扳6长边上还开有孔ⅱ,方轴9的中间孔两侧对称嵌入两个轴承ⅱ14,所述方轴9放入到两片平衡配重连扳6长边一侧,并将轴承ⅱ14的中间孔与两片平衡配重连扳6 长边的孔ⅱ对齐,通过方轴转轴16将方轴9和平衡配重连扳6铰接在一起;
9.等腰的三角形两个底角处分别开有孔ⅲ和孔ⅳ;电动伸缩缸4的伸缩杆一端通过平衡配重连扳6孔ⅲ和电缸伸出转轴18铰接在一起;配重体7通过配重体转轴13安装在平衡
配重连扳6孔ⅳ的位置上。
10.本发明的有益效果:
11.本发明提供了一种处于自然重力环境下,能够让摄像头跟随设备整体一起运动的装置,需要其对某个方向有持续保持的相对或绝对静态姿势的要求时,通过机电机构装置之间的配合作用,满足其姿势状态的需求;并且能够随着挂载车辆的运动状态而动态变化,连续调机电机构装置动作,维持摄像头的姿态。
附图说明
12.图1本发明中一种不稳定运动状态下可自动补偿的水平竖直姿态保持装置图;
13.图2为一种不稳定运动状态下可自动补偿的水平竖直姿态保持装置剖视图;
14.图3图2中i部分的局部放大图;
15.图4为plc控制逻辑框图。
16.附图标记:1-支架、2-摄像头、3-姿态传感器、4-电动伸缩缸、5-固定螺栓、6-平衡配重连扳、7-配重体、8-垂轴、9-方轴、10-电缸固定耳、11-角马、12-轴承ⅰ、13-配重体转轴、 14-轴承ⅱ、16-方轴转轴、17-垂轴固定转轴、18-电缸伸出转轴、19-电缸固定转轴。
具体实施方式
17.下面以具体实施例的形式对本发明技术方案做进一步的解释和说明。
18.一种不稳定运动状态下可自动补偿的水平竖直姿态保持装置,主要包括:支架1、姿态传感器3、电动伸缩缸4、平衡配重连扳6、垂轴8和方轴9;
19.支架1为门型结构,其两侧各安装一个轴承ⅰ12,方轴9两端的轴安装在两个轴承ⅰ12 中;方轴9中部开有中间孔,所述中间孔两侧对称嵌入两个轴承ⅱ14。
20.平衡配重连扳6的结构为一个等腰的三角形,顶角处开有孔ⅰ并设有一个长边,长边上还开有孔ⅱ,等腰的三角形两个底角处分别开有孔ⅲ和孔ⅳ;
21.所述方轴9放入到两片平衡配重连扳6长边一侧,并将轴承ⅱ14的中间孔与两片平衡配重连扳6长边的孔ⅱ对齐,使用方轴转轴16将方轴9和平衡配重连扳6铰接在一起;垂轴8 的上端放入两片平衡配重连扳6中间,垂轴8上端的通孔与平衡配重连扳6的孔ⅰ对齐,并使用垂轴固定轴17铰接在一起;
22.垂轴8下端与姿态传感器3、角马11和电缸固定耳10固定连接在一起,电动伸缩缸4电机一端通过电缸固定转轴19与电缸固定耳10铰接在一起,电动伸缩缸4的伸缩杆一端通过平衡配重连扳6孔ⅲ和电缸伸出转轴18铰接在一起;配重体7通过配重体转轴13安装在平衡配重连扳6孔ⅳ的位置上;摄像头2通过角马11安装在垂轴8的下方。
23.所述的姿态传感器3用于采集垂轴8在xz平面与z轴的夹角角度,plc对姿态传感器3 的角度数据进行延时采集,采集数据若大于设定阈值,驱动电动伸缩缸4的电机正转,或者采集数据若小于负的设定阈值,驱动电动伸缩缸4的电机反转,若负的阈值≤采集数据≤阈值,则重新计时,进行延时采集。
24.工作原理如下:
25.当本装置随车辆或设备运动,装置整体开始不停的震动,摄像头2会发生倾斜或者偏转,无法对观测目标保持所需的拍摄姿态,以对地面方向,即重力方向,为例,说明装置的
工作方式。为了易于说明规定:1.受到重力方向为z方向,即零件垂直向下的方向;2.规定车辆前进方向为x方向;3.俯视时与车辆前进方向在同一水平面里垂直的方向为y方向;
26.如图1所示,装置所在车辆水平向右匀速前进,某一瞬时为上坡,且水平面倾斜,即垂轴8与方轴9组成平面不与水平面垂直,或称为侧翻;摄像头2拍摄方向发生多角度偏移。方轴9两端安装的轴承ⅰ12允许方轴9可以轻松自由的转动,在重力的作用下,使方轴9与垂轴8所在的平面与z轴方向重合,即帮助摄像头2维持水平方向姿态不变;方轴9中间的轴承ⅱ14保证平衡配重连扳6可以绕方轴9转轴轻松自由转动,使垂轴8在重力的作用下,尽量与z轴方向平行;由于装置随车辆做直线运动,同时受到行驶道路的不平整影响,挂载的摄像头2受到牵连运动,其姿态要相对地面做平移;摄像头2与垂轴8为紧固连接,可以看为姿态同步,为了准确了解摄像头2姿态偏移情况,使用固定在垂轴8上的姿态传感器3,其可以根据地球重力和磁场的状态,来判断出自身的姿态,并将测量数据传给plc,plc经过平衡程序的计算结果,发出指令信号,控制电动伸缩缸4的拉伸和收缩,带动平衡配重连扳6另一端的配重体7移动,同时推动底部相连着的垂轴8,绕垂轴8固定转轴转动,这将改变方轴9转轴下面连接的一组零件的质量分布,从而改变其重心位置始终与方轴9转轴轴心和垂轴8固定转轴轴心处在同一yz平面;在机械机构与电动机构工作作用下,使得摄像头2可以在不稳定的运动状态下,排除受到的运动干扰,维持其姿态与z轴方向保持不变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。