1.本实用新型涉及医疗机械技术领域,具体为一种智能机器人近距离后装治疗机。
背景技术:
2.近距离放射治疗是一种短距离放射治疗,治疗时将放射源置于患者体表或体内,靶区可以受到很高的剂量,剂量在靶区外迅速下降。20世纪60年代,226ra是主要的腔内治疗源。但近距离放疗医生很快意识到226ra的缺点,即需要较高的穿刺技术和快速的操作,以免自己及其他工作人员受到过量照射。近距离治疗另一创新研究是远程后装技术,大大降低了工作人员的职业辐射暴露剂量。20世纪60年代,钛管封装的125i粒籽源开始临床应用,1972年whitmore首次报道通过耻骨后插入125i粒籽治疗前列腺癌。103pd、131cs等低能光子源的应用,显著降低了照射带来的危害,患者也不必单独隔离治疗。近距离放射治疗问世一个世纪以来,在肿瘤治疗中发挥着重要作用。
3.现有的近距离后装机设备存在的缺陷是:
4.1、专利文件cn209347959u公开了一种后装治疗机,“包括存储有放射源的放射源储源罐以及分别设于所述放射源储源罐的两端的送丝机构和分度机构,所述送丝机构用以将放射源源线经所述放射源储源罐输送至所述分度机构;施源器通过连接管连接所述分度机构;所述分度机构包括动力部以及与所述动力部相连用以对接通道接口的分度盘,所述分度盘设有位置检测部。还包括与所述动力部相连、用以根据输入的指令控制所述动力部运行的控制部,以实现所述动力部控制所述分度盘对接指定的通道接口。上述后装治疗机,能够精准地实现通道的分度功能”,该后装机安装在一个固定基座上,通过手动推动基座移动到指定位置,不能够自动移动;
5.2、专利文件cn209347958u公开了一种后装治疗机及其送丝机构,“包括:用以供源缆穿设的导管;具有用以供所述导管插嵌的导向槽的导向支座;所述导向支座设有外伸卡爪;具有用以和所述外伸卡爪插嵌的绕线槽的绕线轮;所述导向槽靠近所述绕线轮的一端和所述外伸卡爪位于同一平面;当所述绕线轮旋转时,穿设于所述导管的源缆经所述导向槽的引导缠绕于所述绕线槽。本实用新型还公开了一种包括上述送丝机构的后装治疗机。上述送丝机构,能够实现精准的送丝,显著避免了跳槽乱丝现象的发生”,通过上升或下降移动,然后装机治疗头靠近患者,但离患者还有较远距离,运动不灵活,移动不智能;
6.3、专利文件cn210813559u公开了一种分体式同位素后装治疗机,“包括放射头,安装在所述放射头一侧的连接件,位于所述连接件内,并与所述连接件转动连接的立柱,套设在所述立柱外,并与所述立柱滑动连接的机体,以及位于所述机体远离所述立柱一侧,并与所述机体固定连接的基座;螺杆通过旋转带动旋帽沿着通孔进行移动直至旋帽与连接件贴合,完成对放射头角度的固定,从而在对行动不便的患者进行放射治疗时,医护人员可以根据需要对放射头的高度、角度和方位进行实时调节,且由于放射头一侧的放射区为环形的内凹结构,在通过放射头对患者进行近距离反射治疗的同时,可以避免放射孔与患者的肌肤接触,保证治疗顺利进行”,该后装机辐射源的活度检测,均采用手动与活度计对接,操作
繁琐。
技术实现要素:
7.本实用新型的目的在于提供一种智能机器人近距离后装治疗机,以解决上述背景技术中提出的问题。
8.为实现上述目的,本实用新型提供如下技术方案:一种智能机器人近距离后装治疗机,包括底座板和移动系统,所述底座板的底部安装有移动系统,所述移动系统包括有一号伺服电机、移动轮组、支撑架和二号伺服电机;
9.所述底座板的底部四角均安装有二号伺服电机,所述二号伺服电机的输出端连接有支撑架,所述支撑架的尾端嵌合连接有短杆,所述短杆的两端通过轴件安装有移动轮组,所述底座板的底部四角均通过连接环安装有一号伺服电机,且一号伺服电机的输出端与移动轮组连接,所述短杆的表面设有环形槽,所述短杆通过环形槽与支撑架的尾端嵌合连接;
10.所述底座板的底部四角均安装有电动伸缩杆,所述电动伸缩杆位于二号伺服电机的内侧,所述电动伸缩杆的尾端表面连接有位移感应器,且位移感应器和电动伸缩杆电性连接。
11.优选的,所述底座板的顶部安装有工具箱,所述工具箱的顶部安装有连接座,所述连接座的顶部安装有机械底座,所述机械底座的内部通过轴杆安装有机械臂,所述底座板的顶部安装有立板,且立板位于工具箱的前方。
12.优选的,所述立板的正面安装有光学引导系统和激光雷达,且激光雷达位于光学引导系统的一侧,所述光学引导系统包括有电磁板、激光灯源、海绵板、光敏感应圈和钢板,所述立板的正面安装有钢板,所述钢板的正面安装有海绵板,所述钢板的正面贯穿海绵板安装有光敏感应圈,所述电磁板和钢板相对布置,所述电磁板靠近钢板的表面安装有激光灯源,且光敏感应圈和电磁板电性连接。
13.优选的,所述底座板的顶部安装有收纳箱,且收纳箱位于工具箱的后方,所述收纳箱的底壁安装有对称布置的红外感应开关,所述收纳箱的底壁安装有活度计。
14.优选的,所述机械臂的尾端连接有后装机,所述后装机的输入端连接有输送源线,所述输送源线的尾端电性连接有放射源,所述放射源与输送源线接口的位置安装有束线结构。
15.优选的,所述束线结构包括有限位杆、插管和吸盘,所述输送源线的表面套接有插管,且插管的直径大于输送源线,所述插管的内壁贯穿安装有对称布置的限位杆,所述插管靠近放射源的一端连接有吸盘,且输送源线的尾端贯穿吸盘延伸至放射源的内部与放射源的输出端连接。
16.优选的,所述输送源线由线缆本体、铠装层和屏蔽层,所述线缆本体的表面套接有屏蔽层,所述屏蔽层的外表面套接有铠装层。
17.优选的,所述机械底座的内部安装有配重块,且配重块位于机械臂的一侧,所述工具箱的内部安装有转动电机,所述转动电机的输出端贯穿工具箱与连接座连接。
18.与现有技术相比,本实用新型的有益效果是:
19.1、本实用新型通过安装有移动系统和电动伸缩杆,一号伺服电机带动移动轮组转动,实现水平方向上的移动,电动伸缩杆带动移动轮组抬升并启动二号伺服电机,使得二号
伺服电机带动支撑架转动度,进而使得移动轮组切换方向,辅助本治疗机实现前后、左右的移动操作。
20.2、本实用新型通过安装有机械臂、转动电机和束线结构,通过束线结构将输送源线与放射源接触的位置予以相应的约束固定,保证输送源线关于放射源的顺利持续输送,避免接触不良导致的源传输中断操作,此外机械臂和转动电机的配合使得后装机能够在机械臂的灵活带动下可到达任意位置,使得后装机尽可能地靠近施源器,减少额外的辐射,并可缩短源传输时间。
21.3、本实用新型通过安装有光学引导系统、激光雷达、机械臂以及红外感应开关,电磁板启动促使钢板自主靠近进而实现自主复位,并在此过程中通过激光雷达检测治疗机在移动过程中前方是否出现障碍物,在出现障碍物时与激光雷达电性连接的一号伺服电机关闭,进而起到避障作用,保护治疗机机体的安全,并在后续后装机移动至两组红外感应开关上方时,确定后装机的位置后在机械臂灵活变动位置的辅助下将后装机与活度计实现顺利连接,减少人力放置操作。
附图说明
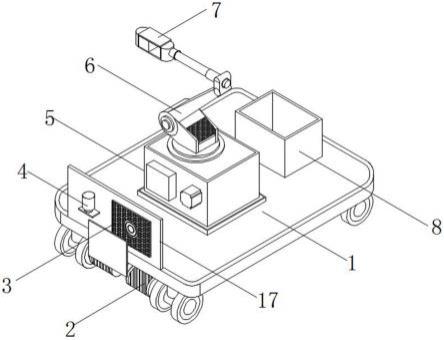
22.图1为本实用新型的整体结构示意图;
23.图2为本实用新型的配重块、机械底座、转动电机、连接座和机械臂安装结构示意图;
24.图3为本实用新型的移动系统和电动伸缩杆体安装结构示意图;
25.图4为本实用新型的收纳箱内部安装结构示意图;
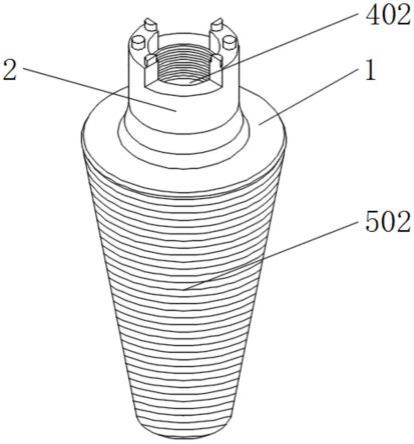
26.图5为本实用新型的后装机、输送源线、束线结构和放射源安装结构示意图;
27.图6为本实用新型的束线结构结构示意图;
28.图7为本实用新型的光学引导系统安装结构示意图;
29.图8为本实用新型的输送源线剖面结构示意图。
30.图中:1、底座板;2、移动系统;201、一号伺服电机;202、移动轮组;203、支撑架;204、二号伺服电机;3、光学引导系统;301、电磁板;302、激光灯源;303、海绵板;304、光敏感应圈;305、钢板;4、激光雷达;5、工具箱;6、机械臂;7、后装机;8、收纳箱;801、红外感应开关;802、活度计;9、输送源线;901、线缆本体;902、铠装层;903、屏蔽层;10、束线结构;1001、限位杆;1002、插管;1003、吸盘;11、放射源;12、位移感应器;13、配重块;14、机械底座;15、转动电机;16、连接座;17、立板;18、电动伸缩杆。
具体实施方式
31.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
32.在本实用新型的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须
具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
33.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
34.请参阅图1-图8,本实用新型提供的一种实施例:一种智能机器人近距离后装治疗机,包括底座板1和移动系统2,底座板1的底部安装有移动系统2,移动系统2包括有一号伺服电机201、移动轮组202、支撑架203和二号伺服电机204;
35.底座板1的底部四角均安装有二号伺服电机204,二号伺服电机204的输出端连接有支撑架203,支撑架203的尾端嵌合连接有短杆,短杆的两端通过轴件安装有移动轮组202,底座板1的底部四角均通过连接环安装有一号伺服电机201,且一号伺服电机201的输出端与移动轮组202连接,短杆的表面设有环形槽,短杆通过环形槽与支撑架203的尾端嵌合连接;
36.底座板1的底部四角均安装有电动伸缩杆18,电动伸缩杆18位于二号伺服电机204的内侧,电动伸缩杆18的尾端表面连接有位移感应器12,且位移感应器12和电动伸缩杆18电性连接。
37.进一步,启动一号伺服电机201,带动移动轮组202转动,进而使得本治疗机能够实现水平方向上的移动,在需要进行与水平方向垂直方向的运动时,先一步启动电动伸缩杆18,使得电动伸缩杆18整体伸长进而将底座板1以及底部的移动轮组202抬升,在此过程中通过位移感应器12检测电动伸缩杆18的位移距离,进而避开电动伸缩杆18位移距离过大导致不必要的做功,从而起到节能的效果,之后启动二号伺服电机204,使得二号伺服电机204带动支撑架203转动90度,进而使得移动轮组202切换方向,辅助本治疗机实现前后、左右的移动操作。
38.底座板1的顶部安装有工具箱5,工具箱5的顶部安装有连接座16,连接座16的顶部安装有机械底座14,机械底座14的内部通过轴杆安装有机械臂6,机械臂6的尾端连接有后装机7,后装机7的输入端连接有输送源线9,输送源线9的尾端电性连接有放射源11。
39.进一步,通过工具箱5对机械臂6的辅助,使得机械臂6能够凭借多轴转换实现相对灵活的位置变化,从而可带动后装机7到达任意位置,使得后装机7尽可能地靠近施源器,减少额外的辐射,并可缩短源传输时间。
40.底座板1的顶部安装有立板17,且立板17位于工具箱5的前方,立板17的正面安装有光学引导系统3和激光雷达4,且激光雷达4位于光学引导系统3的一侧,光学引导系统3包括有电磁板301、激光灯源302、海绵板303、光敏感应圈304和钢板305,立板17的正面安装有钢板305,钢板305的正面安装有海绵板303,钢板305的正面贯穿海绵板303安装有光敏感应圈304,电磁板301和钢板305相对布置,电磁板301靠近钢板305的表面安装有激光灯源302,且光敏感应圈304和电磁板301电性连接。
41.进一步,将电磁板301镶嵌安装在墙体表面,之后启动激光灯源302,其发出的光线投射至同一方向的光敏感应圈304内部时,光敏感应圈304检测到光强增加继而电磁板301
启动产生磁性吸引作用,使得电磁板301产生的磁力吸引能够促使钢板305自主靠近进而实现自主复位,并在此过程中通过激光雷达4检测治疗机在移动过程中前方是否出现障碍物,在出现障碍物时与激光雷达4电性连接的一号伺服电机201关闭,进而起到避障作用,保护治疗机机体的安全。
42.海绵板303的使用,能够减少钢板305和电磁板301靠近吸附那一瞬间的撞击效果,进而起到保护效果。
43.底座板1的顶部安装有收纳箱8,且收纳箱8位于工具箱5的后方,收纳箱8的底壁安装有对称布置的红外感应开关801,收纳箱8的底壁安装有活度计802。
44.进一步,在投放后装机7时,利用机械臂6的活动使得后装机7位移至收纳箱8的上方时,红外感应开关801检测到收纳箱8上方存在有物体,为保证后装机7投放的准确性,在两组红外感应开关801均检测到收纳箱8上方存在有物体时表示后装机7的机体覆盖在两组红外感应开关801的上方,进而使得后装机7在后续投放嵌合至活度计802顶部实现顺利的嵌合放置,进而实现后装机7与活度计802的顺利连接,减少人力放置后装机7与活度计802的必要,减少劳作量。
45.放射源11与输送源线9接口的位置安装有束线结构10,束线结构10包括有限位杆1001、插管1002和吸盘1003,输送源线9的表面套接有插管1002,且插管1002的直径大于输送源线9,插管1002的内壁贯穿安装有对称布置的限位杆1001,插管1002靠近放射源11的一端连接有吸盘1003,且输送源线9的尾端贯穿吸盘1003延伸至放射源11的内部与放射源11的输出端连接。
46.进一步,通过束线结构10,可将输送源线9与放射源11接触的位置予以相应的约束固定,进而使得后装机7在投放进活度计802内部时输送源线9与放射源11的接口处仍保留有一定的约束作用,进而保证输送源线9关于放射源11的顺利输送。
47.将输送源线9插进插管1002内部后转动限位杆1001,使得限位杆1001的尾端对输送源线9的表面形成挤压限位处理后,将吸盘1003吸附安装在放射源11的表面,进而形成稳定的约束连接结构。
48.输送源线9由线缆本体901、铠装层902和屏蔽层903,线缆本体901的表面套接有屏蔽层903,屏蔽层903的外表面环绕安装有屏蔽层903,机械底座14的内部安装有配重块13,且配重块13位于机械臂6的一侧,机械臂6的尾端连接有后装机7,工具箱5的内部安装有转动电机15,转动电机15的输出端贯穿工具箱5与连接座16连接。
49.进一步,通过铠装层902和屏蔽层903能够为线缆本体901提供稳定的外层保护以及电磁屏蔽保护,进而减少输送源线9在接通放射源11和后装机7时辐射的扩散。
50.通过转动电机15带动连接座16转动使得机械臂6发生换向处理,从而使得机械臂6能够实现更加灵活的位置改变。
51.通过配重块13,能够对机械臂6形成配重处理,进而使得机械底座14处于平衡状态,使得后装机7在使用时处于稳定状态。
52.工作原理:在使用本治疗机时,先将输送源线9与放射源11接触的位置予以相应的约束固定,进而使得后装机7在投放进活度计802内部时输送源线9与放射源11的接口处仍保留有一定的约束作用,进而保证输送源线9关于放射源11的顺利输送,之后将启动机械臂6和转动电机15,使得后装机7能够在机械臂6的灵活带动下可到达任意位置,使得后装机7
尽可能地靠近施源器,减少额外的辐射,并可缩短源传输时间;
53.在使用过程中,启动激光灯源302,其发出的光线投射至同一方向的光敏感应圈304内部时,光敏感应圈304检测到光强增加继而电磁板301启动产生磁性吸引作用,使得电磁板301产生的磁力吸引能够促使钢板305自主靠近进而实现自主复位,并在此过程中通过激光雷达4检测治疗机在移动过程中前方是否出现障碍物,在出现障碍物时与激光雷达4电性连接的一号伺服电机201关闭,进而起到避障作用,保护治疗机机体的安全;
54.启动一号伺服电机201,带动移动轮组202转动,进而使得本治疗机能够实现水平方向上的移动,在需要进行与水平方向垂直方向的运动时,先一步启动电动伸缩杆18,使得电动伸缩杆18整体伸长进而将底座板1以及底部的移动轮组202抬升,在此过程中通过位移感应器12检测电动伸缩杆18的位移距离,进而避开电动伸缩杆18位移距离过大导致不必要的做功,从而起到节能的效果,之后启动二号伺服电机204,使得二号伺服电机204带动支撑架203转动90度,进而使得移动轮组202切换方向,辅助本治疗机实现前后、左右的移动操作;
55.之后在两组红外感应开关801均检测到收纳箱8上方时利用机械臂6的垂直降落使得后装机7与活度计802的顺利连接,减少人力放置后装机7与活度计802的必要,减少劳作量。
56.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。