1.本实用新型涉及工业设备领域,尤其涉及一种新型翻转装置。
背景技术:
2.在传统的清洗物料或观察物料的设备中,通常是将物料装载在治具中后,在翻转时是通过人工翻转,在需要对特定角度有需求的情况下,人工无法胜任,且,人工也无法一次性对多种治具同时进行翻转,无法保证观察数据的统一性。
技术实现要素:
3.本实用新型的目的是提供一种新型翻转装置。
4.为实现上述目的,采用以下技术方案:
5.一种新型翻转装置,包括:
6.抓取机构,所述抓取机构用于使动其两侧的夹持组件做相向远离或对向接近运动,而使得所述夹持组件夹持住若干个治具的两侧;
7.升降机构,所述升降机构用于带动所述抓取机构上下移动;
8.拨叉机构,所述拨叉机构设置于所述升降机构的两侧,用于在所述抓取机构移动到预设工位后,压向所述治具并驱动所述治具旋转。
9.进一步的,所述抓取机构包括安装座,所述安装座的一侧设置有使动所述夹持组件移动的第一气缸,所述安装座与所述升降机构连接。通过设置第一气缸来驱动夹持组件做相向远离或对向接近运动。
10.进一步的,所述夹持组件包括中间板和若干个位于同一平面的夹持板,所述夹持板的底部设置有用于与所述治具两侧的转动杆相配合的定位孔,若干个所述夹持板的一面均通过第一导轨和第一滑块设置在所述中间板上,所述中间板的上方设置有分别设置若干个第二气缸,所述第二气缸用于带动所述夹持板往上或往下移动,所述中间板与所述第一气缸的驱动端连接。夹持板的定位孔用于固定治具的转动杆,且,夹持组件由多个夹持板组成,通过第二气缸分别移动不同的夹持板,便可以有选择地改变不同治具在空间上的位置,便于清洗、观察或加工。
11.进一步的,所述安装座内设置有可转动的第一齿轮和分别啮合在所述第一齿轮两侧的圆齿条,其中一个所述圆齿条的一端连接于其中一个所述中间板,另一个所述圆齿条的另一端连接于另一个所述中间板。由于只有一个第一气缸,第一气缸在工作时只会带动一侧的中间板移动,因此,在设置第一齿轮和圆齿条之后,在一个中间板被第一气缸推动后,中间板带动圆齿条移动,进而带动第一齿轮转动,第一齿轮再带动另一个圆齿条移动,实现另一个中间板被推动,进而实现夹持板做相向远离或对向接近运动。
12.进一步的,所述定位孔的上部呈圆形,下部呈长方形,所述转动杆呈长方体形状,所述拨叉机构包括若干个可将所述转动杆嵌入其中的转动件,所述转动件镶嵌在第二齿轮中,若干个所述第二齿轮均与一齿条相啮合,所述齿条由一电机驱动左右移动。定位孔下部
呈长方形、转动杆呈长方体形状,转动杆便可以平稳地卡在定位孔的下部,同时,通过齿条带动第二齿轮转动,进而带动转动杆在定位孔的上部中转动,实现治具的翻转。
13.进一步的,所述齿条通过第二导轨和第二滑块设置在一滑座上,所述滑座上还设置有所述电机,所述电机通过丝杆和丝母带动所述齿条左右移动。采用电机推动齿条,使得齿条移动过程平稳,且通过plc控制配合,可以实现在任意长度的移动,进而实现治具的任意角度翻转。
14.进一步的,所述滑座通过第三导轨和第三滑块设置在一固定座上,所述固定座上设置有驱动所述滑座左右移动的第三气缸。通过第三气缸和固定座,使得滑座可以完成的左右调整位置的动作。
15.进一步的,所述固定座通过第四滑块和第四导轨连接在第一连接座的一端,所述第一连接座上设置有第四气缸,在所述抓取机构移动到预设工位后,所述第四气缸用于驱动所述固定座做相对于所述抓取机构远离或接近的运动。使得拨叉机构可以实现压向抓取机构的动作。
16.进一步的,所述升降机构可水平移动地设置在一龙门架上。便于调整工作位置。
17.进一步的,所述升降机构包括一升降座和一第二连接座,所述升降座可水平移动地设置在所述龙门架上,所述第二连接座通过第五滑块和第五导轨与所述升降座连接,所述升降座上设置有驱动所述第二连接座上下移动的第五气缸,所述第二连接座与所述抓取机构连接。通过第五气缸实现升降。
18.本实用新型的技术方案具有以下有益效果:
19.可用于实现产品密集排布,一次翻转多个产品,将产品的加工面翻转至指定方向,可实现任意角度的翻转。
20.本实用新型采用电机、气缸、齿轮齿条啮合传动等机构组合,节省人工,大大提高生产效率。
附图说明
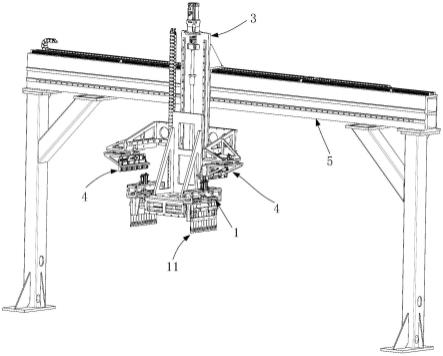
21.图1为本说明书实施例中自动化装置的整体结构示意图;
22.图2为本说明书实施例中抓取机构的结构示意图;
23.图3为本说明书实施例中夹持板的结构示意图;
24.图4为本说明书实施例中治具的结构示意图;
25.图5为本说明书实施例中拨叉机构的结构示意图;
26.图6为本说明书实施例中拨叉机构的右视图;
27.图7为本说明书实施例中拨叉机构的后视图;
28.图8为本说明书实施例中连接座的结构示意图;
29.图9为本说明书实施例中升降机构的结构示意图。
30.附图标记:
31.1、抓取机构;11、夹持组件;111、中间板;112、夹持板;1121、定位孔;12、安装座;13、第一气缸;14、第一导轨;15、第一滑块;16、第二气缸;17、第一齿轮;18、圆齿条;2、治具;21、转动杆;3、升降机构;31、升降座;32、第五导轨;33、第五滑块;34、第五气缸;35、第二连接座;4、拨叉机构;41、转动件;42、第二齿轮;43、齿条;44、电机;45、第三导轨;46、第三滑
块;47、滑座;48、丝杆;49、丝母;410、第四导轨、411、第四滑块;412、固定座;413、第三气缸;414、第四滑块;415、第四导轨;416、第一连接座;417、第四气缸;5、龙门架。
具体实施方式
32.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
33.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
34.如图1所示,本说明书实施例提供一种新型翻转装置,包括:
35.抓取机构1,抓取机构1用于使动其两侧的夹持组件11做相向远离或对向接近运动,而使得夹持组件11夹持住若干个治具2的两侧;
36.升降机构3,升降机构3用于带动抓取机构1上下移动;
37.拨叉机构4,拨叉机构4设置于升降机构3的两侧,用于在抓取机构1移动到预设工位后,压向治具2并驱动治具2旋转。
38.在一实施方式中,如图2至图4所示,抓取机构1包括安装座12,安装座12的一侧设置有使动夹持组件11移动的第一气缸13,安装座12与升降机构3连接。通过设置第一气缸13来驱动夹持组件11做相向远离或对向接近运动。
39.夹持组件11包括中间板111和若干个位于同一平面的夹持板112,夹持板112的底部设置有用于与治具2两侧的转动杆21相配合的定位孔1121,若干个夹持板112的一面均通过第一导轨14和第一滑块15设置在中间板111上,中间板111的上方设置有分别设置若干个第二气缸16,第二气缸16用于带动夹持板112往上或往下移动,中间板111与第一气缸13的驱动端连接。夹持板112的定位孔1121用于固定治具2的转动杆21,且,夹持组件11由多个夹持板112组成,通过第二气缸16分别移动不同的夹持板112,便可以有选择地改变不同治具2在空间上的位置,便于清洗、观察或加工。
40.安装座12内设置有可转动的第一齿轮17和分别啮合在第一齿轮17两侧的圆齿条18,其中一个圆齿条18的一端连接于其中一个中间板111,另一个圆齿条18的另一端连接于另一个中间板111。由于只有一个第一气缸13,第一气缸13在工作时只会带动一侧的中间板111移动,因此,在设置第一齿轮17和圆齿条18之后,在一个中间板111被第一气缸13推动后,中间板111带动圆齿条18移动,进而带动第一齿轮17转动,第一齿轮17再带动另一个圆齿条18移动,实现另一个中间板111被推动,进而实现夹持板112做相向远离或对向接近运动。
41.在一实施方式中,如图5至图8所示,定位孔1121的上部呈圆形,下部呈长方形,转动杆21呈长方体形状,拨叉机构4包括若干个可将转动杆21嵌入其中的转动件41,转动件41镶嵌在第二齿轮42中,若干个第二齿轮42均与一齿条43相啮合,齿条43由一电机44驱动左
右移动。定位孔1121下部呈长方形、转动杆21呈长方体形状,转动杆21便可以平稳地卡在定位孔1121的下部,同时,通过齿条43带动第二齿轮42转动,进而带动转动杆21在定位孔1121的上部中转动,实现治具2的翻转。
42.齿条43通过第二导轨和第二滑块设置在一滑座47上,滑座47上还设置有电机44,电机44通过丝杆48和丝母49带动齿条43左右移动。采用电机44推动齿条43,使得齿条43移动过程平稳,且通过plc控制配合,可以实现在任意长度的移动,进而实现治具2的任意角度翻转。
43.滑座47通过第三导轨45和第三滑块46设置在一固定座412上,固定座412上设置有驱动滑座47左右移动的第三气缸413。通过第三气缸413和固定座412,使得滑座47可以完成的左右调整位置的动作。
44.固定座412通过第四滑块414411和第四导轨415410连接在第一连接座416的一端,第一连接座416上设置有第四气缸417,在抓取机构1移动到预设工位后,第四气缸417用于驱动固定座412做相对于抓取机构1远离或接近的运动。使得拨叉机构4可以实现压向抓取机构1的动作。
45.其中,值得注意的是,在图5至图7中所标注的第一连接座416是省略的,其完整结构可以参考图1和图8,即第一连接座416是固定不移动的。
46.在一实施方式中,如图1和图9所示,升降机构3可水平移动地设置在一龙门架5上。便于调整工作位置。
47.升降机构3包括一升降座31和一第二连接座35,升降座31可水平移动地设置在龙门架5上,第二连接座35通过第五滑块33和第五导轨32与升降座31连接,升降座31上设置有驱动第二连接座35上下移动的第五气缸34,第二连接座35与抓取机构1连接。通过第五气缸34实现升降。
48.原理说明:在运行中,升降机构3带动在龙门架5上移动,来到多个并列设置的治具2上方,升降机构3中的第五气缸34驱动抓取机构1下降,夹持组件11将多个治具2包围住,然后,第一气缸13收缩,带动中间板111合拢,圆齿条18移动,进而带动第一齿轮17转动,第一齿轮17带动另一个圆齿条18往与第一气缸13驱动端的运行方向的相反方向移动,实现带动另一个中间板111合拢,夹持板112中的定位孔1121的上部穿过治具2的转动杆21后,在第五气缸34气缸带动抓取组件上升的时候,治具2的转动杆21落入到定位孔1121的下部,使得治具2被固定。
49.其中,第二气缸16可以设置两个,两个第二气缸16的驱动端可以错落连接不同的夹持板112,即,一个第二气缸16与第一个、第三个、第四个等奇数位数的夹持板112上端连接,另一个第二气缸16与第二个、第四个、第六个等偶数位数的夹持板112上端连接,然后,一个第二气缸16驱动端带动其连接的夹持板112上升,另一个第二气缸16带动其连接的夹持板112下压,便可以将多个治具2错落分布,以便于接下来的清洗和观察。
50.在抓取机构1上升到两个拨叉机构4之间时,第四气缸417驱动固定座412压向治具2,即转动件41压向转动杆21,将转动杆21嵌入其中,具体的转动件41上可以设置于转动杆21相配合的凹槽,便可以完成嵌入动作,其中,在第四气缸417推进时,第三气缸413可以左右移动滑座47,以确保转动件41可以匹配转动杆21。
51.其中,由于上述中治具2时错落分布的,因此,在同一侧的转动件41无法一一匹配
邻近的转动杆21,则可以通过设置抓取机构1两侧的拨叉机构4的高度落差不同,使得治具2的有一端的转动杆21与拨叉机构4连接即可。
52.随后,电机44带动齿条43移动,进而带动第二齿轮42、转动件41转动,使得治具2在多个角度的翻转。
53.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。此外,本领域的技术人员能够理解,尽管在此所述的一些实施例包括其它实施例中所包括的某些特征而不是其它特征,但是不同实施例的特征的组合意味着处于本实用新型的范围之内并且形成不同的实施例。例如,在上面的权利要求书中,所要求保护的实施例的任意之一都可以以任意的组合方式来使用。公开于该背景技术部分的信息仅仅旨在加深对本实用新型的总体背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。