1.本技术涉及机械领域,尤其是一种物料裁切系统。
背景技术:
2.随着大规模生产进程的发展,自动振盘摆料以及人工摆盘技术也得到了广泛的应用。然而,自动振盘摆料技术的抛料率较高,摆料成功率与操作人员的经验相关联;人工摆盘技术对人力的需求较大,且人工操作错误率较高,生产效率低。
技术实现要素:
3.鉴于以上问题,本技术提供一种物料裁切系统,可以精细地裁切物料,并通过自动化机械进行物料摆盘,提高生产效率以及生产品质。
4.本技术提供一种物料裁切系统,用于物料带上物料的裁切及摆盘,物料带包括料带主体、物料和连接部,物料通过连接部与料带主体连接,物料裁切系统包括拨料裁切机构与接料转移机构,其中,拨料裁切机构包括:拨料机构,包括滑道,滑道用于容置物料带,物料带在滑道中移动;裁切机构,包括第一驱动装置、第一刀组以及第二刀组,第一刀组与第一驱动装置连接,第二刀组设置于滑道,第一驱动装置用于驱动第一刀组靠近或远离第二刀组往复移动,物料带位于第一刀组和第二刀组之间,当第一刀组移动到与第二刀组啮合时,物料带的连接部被切断以使物料与料带主体脱离;接料转移机构包括第一接料装置,其中第一接料装置与滑道底部间隔设置,用于当连接部被切断时,承载物料。
5.在一些可能的实现方式中,接料转移机构还包括第二接料装置,第二接料装置与第一接料装置间隔设置,且第一接料装置与第二接料装置均固定于一固定板上,第一接料装置与第二接料装置均垂直于固定板,固定板固定于沿物料带方向的平移轴上,且固定板由第二驱动装置驱动沿平移轴往复移动以实现连续接料。
6.在一些可能的实现方式中,接料转移机构还包括第一翻转轴与第二翻转轴,当第一接料装置承载物料时,第一接料装置向垂直于物料带且远离物料带的方向移动,固定板沿平移轴平移,带动第一接料装置沿靠近第一翻转轴的方向移动,当第一接料装置移动到第一翻转轴下方时,第一接料装置由连接于其底部的第三驱动装置驱动上升,使第一接料装置顶部与第一翻转轴底部位于同一水平面,第一翻转轴将物料吸附于第一翻转轴底部,并进行翻转,第三驱动装置驱动第一接料装置下降以完成物料的转移。
7.在一些可能的实现方式中,当第一接料装置承载物料时,固定板带动第二接料装置沿靠近滑道的方向移动,当接料装置移动到滑道下方时,第二接料装置由连接于其底部的第三驱动装置驱动上升,使第二接料装置与滑道位于同一水平面,第二接料装置承载物料,第三驱动装置驱动第二接料装置下降。
8.在一些可能的实现方式中,第一刀组包括第一子刀组与第二子刀组,第一子刀组与第二子刀组均包括至少两个刀刃,第一子刀组与第二子刀组两两相邻设置,第一子刀组中的刀刃与物料带的垂直距离小于第二子刀组中的刀刃与物料带的垂直距离。
9.在一些可能的实现方式中,物料带上设置有第一定位孔,拨料机构上设置定位针,在物料带完成一次裁切后移动至特定位置时,定位针与第一定位孔适配,用于定位物料带。
10.在一些可能的实现方式中,物料带的连接部包括第一连接部和第二连接部,第二刀组包括第三子刀组与第四子刀组,第三子刀组相对于第一连接部设置,第四子刀组相对于第二连接部设置,第一刀组中的刀刃与第三子刀组中的刀刃啮合时,第一连接部被切断,第一刀组中的刀刃与第四子刀组中的刀刃啮合时,第二连接部被切断。
11.在一些可能的实现方式中,拨料裁切机构还包括废料裁切机构,当物料带中的物料被裁切机构切断后,废料裁切机构用于裁切剩余的物料带。
12.在一些可能的实现方式中,第一接料装置与第二接料装置上设置有定位针,定位针与第二定位孔适配,用于定位物料的位置。
13.在一些可能的实现方式中,第一翻转轴与第二翻转轴底部均设置有抽气孔,用于将第一接料装置或接料装置承载的物料通过真空吸附到第一翻转轴或第二翻转轴上。
14.由此,本技术提供的物料裁切系统,可以精细地裁切物料与废料,并通过自动化机械进行物料摆盘,提高生产效率以及生产品质。
附图说明
15.图1为本技术的一个实施例提供的物料摆盘系统的结构示意图。
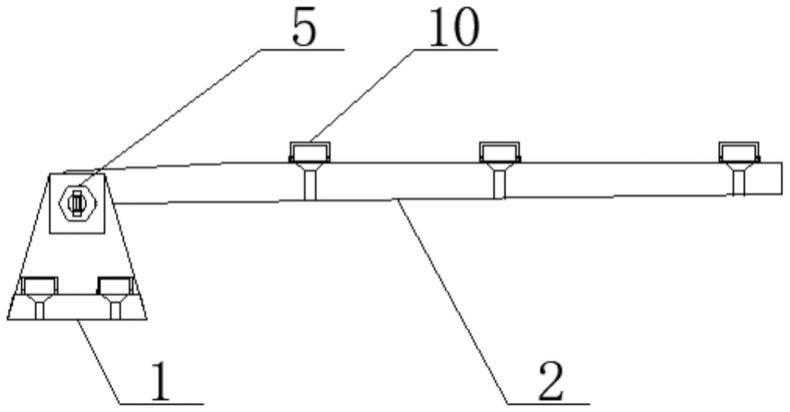
16.图2为图1中拨料裁切机构的结构示意图。
17.图3为图2中物料带的局部结构示意图。
18.图4为图2中拨料裁切机构的局部结构示意图。
19.图5为图2中第一刀组的结构示意图。
20.图6为图2中第二刀组的结构示意图。
21.图7为图1中接料转移机构的结构示意图。
22.图8为图7中接料转移机构的局部结构示意图。
23.图9为图8中接料装置的侧视图。
24.图10为图7中第二翻转轴的结构示意图。
25.主要元件符号说明
26.物料摆盘系统
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100
27.拨料裁切机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
28.接料转移机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20
29.取料机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30
30.料盘收料机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40
31.第一驱动装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
101
32.第一刀组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
102
33.滑道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
103
34.物料带
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
104
35.第二刀组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
105
36.废料裁切机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
106
37.第一连接部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
107
38.第二连接部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
108
39.物料
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
109
40.第一物料
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1091
41.第二物料
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1092
42.第一定位孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
110
43.第二定位孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1101
44.定位针
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
111、2021
45.废料带
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
112
46.拨料器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
113
47.拨料机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
114
48.裁切机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
115
49.第一子刀组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1021
50.第二子刀组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1022
51.刀刃
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1023、1024
52.壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1025、1053、2024
53.滑动部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1026
54.第三子刀组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1051
55.第四子刀组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1052
56.第一接料装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
201
57.接料装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
202
58.固定板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
203
59.第一翻转轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
205
60.第二翻转轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
204
61.第二驱动装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
206
62.第三驱动装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
207
63.导轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
208
64.真空气阀
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2022
65.抽气孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2023
66.第四驱动装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2041
67.旋转轴体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2042
68.支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2043
69.如下具体实施方式将结合上述附图进一步说明本实用新型。
具体实施方式
70.本技术实施例中,“第一”、“第二”等词汇,仅是用于区别不同的对象,不能理解为指示或暗示相对重要性,也不能理解为指示或暗示顺序。例如,第一应用、第二应用等是用于区别不同的应用,而不是用于描述应用的特定顺序,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。
71.请参阅图1,为本技术的一个实施例提供的物料摆盘系统100的结构示意图。物料
摆盘系统100可以包括拨料裁切机构10、接料转移机构20、取料机构30以及料盘收料机构40,其中,拨料裁切机构10用于裁切物料带上的物料,接料转移机构20用于承载并翻转裁切后的物料,取料机构30可以用于将物料从接料转移机构20上转移到料盘收料机构40。在一个实施例中,取料机构30可以为一个机械手结构。料盘收料机构40包括料盘,料盘用于收容物料。
72.请参阅图2,为本技术的一个实施例提供的拨料裁切机构10的结构示意图。拨料裁切机构10包括拨料机构114、裁切机构115以及废料裁切机构106,拨料机构114包括滑道103、拨料器113,裁切机构115包括第一驱动装置101、第一刀组102、第二刀组105,其中,滑道103大致呈中空形状,且滑道103用于容置物料带104,可以理解,滑道103的中空区域延伸方向与物料带104的延伸方向一致,且物料带104设置于滑道103的中空区域内。第一刀组102设置于第一驱动装置101底部,且第一刀组102与滑道103间隔设置,第一刀组102设置于滑道103的上方,第一驱动装置101用于驱动第一刀组102沿垂直于物料带104的方向进行往复移动,以切割物料带104,第二刀组105设置于滑道103的中空区域中,且第二刀组105设置于物料带104的下方,第二刀组105用于与第一刀组102进行啮合,以完成对物料带104的裁切。
73.在一些实施例中,废料裁切机构106设置于滑道103沿物料带104滑动方向延伸的一端,且废料裁切机构106中设置有中空区域,滑道103从该中空区域穿过。当物料带104被第一刀组102以及第二刀组105裁切完成后,废料裁切机构106用于裁切物料带104剩余的部分,以完成物料带104的废料裁切。
74.请参阅图3,图3为物料带104的局部结构俯视示意图,物料带104包括料带主体、物料109以及连接部,在一些实施例中,料带主体包括第一定位孔110以及废料带112,连接部包括第一连接部107以及第二连接部108,物料109包括第一物料1091以及第二物料1092,第一物料1091大致呈l型,且第一物料1091与第二物料1092结构相同,第一物料1091与第二物料1092相对设置,第一物料1091通过第一连接部107与废料带112连接,第二物料1092通过第二连接部108与废料带112连接,第一物料1091与第二物料1092上均设置有第二定位孔1101,第一定位孔110与第二定位孔1101大致呈圆形,且第一定位孔110沿废料带112的两条长边均匀设置,用于与拨料器113上设置的定位针111(请一并参阅图4)配合以对物料带104进行定位。
75.请参阅图4,图4为拨料机构114的局部结构示意图,拨料器113固定于滑道103的上表面,且拨料器113相对于滑道103设置的一面上设置有定位针111,可以理解,定位针111可以与物料带104上设置的第一定位孔110适配,以完成物料带104的定位功能。
76.可以理解,拨料机构114对物料带104进行定位可以提高第一刀组102以及第二刀组105对物料带104的裁切精度,减少坏料的风险。
77.请参阅图5,为本技术的一个实施例提供的第一刀组102的结构示意图。第一刀组102包括壳体1025、滑动部1026、第一子刀组1021、第二子刀组1022以及分别设置于第一子刀组1021底端的刀刃1023和设置于第二子刀组1022底端的刀刃1024。在一些实施例中,第一刀组包括多个第一子刀组1021和多个第二子刀组1022,多个第一子刀组1021和多个第二子刀组1022间隔设置,即相邻的两个第一子刀组1021之间有且只有一个第二子刀组1022。在一些实施例中,第一子刀组1021包括至少两个滑动部1026,第二子刀组1022也包括至少
两个滑动部1026,且第一子刀组1021中的滑动部1026与第二子刀组1022中的滑动部1026一一相邻设置。
78.在一些实施例中,刀刃1023以及刀刃1024均设置于滑动部1026底端,且刀刃1023可以包括至少两片刀刃,其中一片刀刃用于裁切物料带104上的第一连接部107,另一片刀刃用于裁切物料带104上的第二连接部108,可以理解,刀刃1024也可以包括至少两片刀刃,其中一片刀刃用于裁切物料带104上的第一连接部107,另一片刀刃用于裁切物料带104上的第二连接部108,在一些实施例中,第一子刀组1021中的刀刃1023距离物料带104的垂直距离大于第二子刀组1022中的刀刃1024距离物料带104的垂直距离,在另一些实施例中,第一子刀组1021中的刀刃1023距离物料带104的垂直距离可小于第二子刀组1022中的刀刃1024距离物料带104的垂直距离。
79.可选地,第一子刀组1021与第二子刀组1022的刀组安装高度不同,或者第一子刀组1021与第二子刀组1022中刀刃长度不同,或者第一子刀组1021与第二子刀组1022中滑动部1026的长度不同,以使得第一子刀组1021中的刀刃1023距离物料带104的垂直距离与第二子刀组1022中的刀刃1024距离物料带104的垂直距离不同。
80.可以理解的是,由于第一子刀组1021的刀刃距离物料带104的垂直距离与第二子刀组1022中的距离物料带104的垂直距离不一致,所以物料带104上的相邻的两个物料109在裁切时的时间就不一致,比如若第一子刀组1021的刀刃1023距离物料带104的垂直距离大于第二子刀组1022的刀刃1024距离物料带104的垂直距离,则第一子刀组1021对应的物料109在裁切时较早被裁切,而第二子刀组1022对应的物料109在裁切时较晚被裁切,相邻两个物料109的裁切时间差为第一子刀组1021与第二子刀组1022的刀刃距离物料带104的垂直距离差除以第一驱动装置101在裁切时的运动速度。如此,可减少物料109在裁切过程中的变形风险,同时提高了第一驱动装置101的驱动效率,降低了裁切物料带104的裁切力。第一刀组102的壳体1025包括至少两个长型凹槽,该凹槽用于收容滑动部1026,且滑动部1026可以在该长型凹槽中由第一驱动装置101推动从而沿垂直于物料带104的方向往复滑动,使得刀刃1023以及刀刃1024接触物料带104上的第一连接部107以及第二连接部108,从而与第二刀组105中的刀刃相啮合,以裁切物料带104上的物料109。
81.请参阅图6,为本技术的一个实施例提供的第二刀组105的结构示意图。第二刀组105包括壳体1053、第三子刀组1051以及第四子刀组1052,其中,壳体1053大致呈矩形,中间设置有空心区域,物料带104从该中空区域上方穿过,第一子刀组1021包括至少两个刀刃,该至少两个刀刃间隔设置于壳体1053的长边的一侧,第二子刀组1022也包括至少两个刀刃,该至少两个刀刃间隔设置于壳体1053的长边的另一侧,第一子刀组1021的刀刃与第二子刀组1022的刀刃相对设置。
82.当第一驱动装置101驱动第一刀组102的滑动部1026向靠近物料带104的方向滑动时,第一刀组102上的刀刃1023以及刀刃1024与第二刀组105中的第三子刀组1051以及第四子刀组1052啮合,以切断第一连接部107以及第二连接部108,完成对物料109的裁切。物料带104的剩余部分(即废料带112)将被废料裁切机构106进行裁切并丢弃。
83.请参阅图7,图7所示为接料转移机构20的结构示意图。接料转移机构20包括第一接料装置201、接料装置202、固定板203、第一翻转轴205以及第二翻转轴204,其中,第一接料装置201的长度不小于第一刀组102以及第二刀组105沿滑道103延伸方向的长度,且第一
接料装置201相对于滑道103的中空区域的下方设置,当第一刀组102与第二刀组105完成对物料109的裁切时,物料109由于重力向下移动,第一接料装置201用于承载第一刀组102与第二刀组105啮合时裁切出的物料109,第一接料装置201沿物料带104滑动方向的一端与固定板203固定,且固定板203还连接接料装置202沿物料带104滑动方向的一端,用于固定接料装置202,固定板203与第一接料装置201以及接料装置202均垂直设置。
84.第一翻转轴205与第二翻转轴204分别设置于滑道103的两侧,且第一翻转轴205与第一接料装置201相对设置,第二翻转轴204与接料装置202相对设置,第一翻转轴205用于吸附第一接料装置201上承载的物料109,并将其进行翻转,取料机构30可以将翻转后的物料109转移到料盘收料机构40,以完成物料109的摆盘。第二翻转轴204与第二接料装置202之间的配合工作原理类似第一翻转轴205和第一接料装置201,在此不再赘述。
85.请参阅图8,为本技术的一个实施例提供的第一接料装置201以及第二接料装置202的示意图。第一接料装置201与第二接料装置202之间的间隔距离与第一翻转轴205或第二翻转轴204与物料带104的间隔距离相等,固定板203设置于导轨208上,且导轨208下方设置有第二驱动装置206,第二驱动装置206与固定板203电连接,用于驱动固定板203沿导轨208方向往复移动,第一接料装置201以及第二接料装置202的下方设置有第三驱动装置207,第三驱动装置207与第一接料装置201以及第二接料装置202连接,用于驱动第一接料装置201以及第二接料装置202沿垂直于导轨208的方向往复运动,可以理解,当第一刀组102与第二刀组105啮合时,第二驱动装置206驱动固定板203沿靠近第二刀组105的方向在导轨208上移动,使得第一接料装置201与第二刀组105相对,第三驱动装置207驱动第一接料装置201向上移动以靠近第二刀组105以及物料带104,被裁切完成的物料109由于重力落在第一接料装置201上,第三驱动装置207驱动第一接料装置201远离第二刀组105以及物料带104,完成对物料109的转移。第二接料装置202的工作原理类似第一接料装置201,在此不再赘述。
86.请参阅图9,为本技术的一个实施例提供的第二接料装置202的结构示意图,可以理解,第一接料装置201与第二接料装置202的结构相同,在此以第二接料装置202为例进行说明。第二接料装置202包括壳体2024、真空气阀2022、定位针2021,壳体2024用于容置第二接料装置202的轴体部分,且壳体2024上设置有至少一个缺口,该缺口上设置有真空气阀2022,第二接料装置202的轴体上设置有定位针2021,定位针2021可以与物料109上的第二定位孔1101适配,以实现对物料109的定位。第二接料装置202的轴体上还设置有抽气孔2023,真空气阀2022可以通过抽气孔2023抽取物料109与第一接料装置201之间的空气,以实现吸附,防止物料109滑动造成的定位不准。
87.请参阅图10,图10所示为第二翻转轴204的结构示意图,可以理解,第二翻转轴204与第一翻转轴205的结构相同,在此以第二翻转轴204为例进行说明。第二翻转轴204包括第四驱动装置2041、旋转轴体2042以及支架2043,其中支架用于支撑旋转第四驱动装置2041以及旋转轴体2042,第四驱动装置2041与旋转轴体2042连接。可以理解,旋转轴体2042与第二接料装置202长度相同,与第二接料装置202类似,旋转轴体2042上可以设置有抽气孔,以实现对第二接料装置202上承载的物料109进行真空吸取。可选地,旋转轴体2042上也可以设置有定位针,以实现对物料109的定位。
88.当旋转轴体2042从第二接料装置202上将物料109吸附后,第四驱动装置2041可以
驱动旋转轴体2042进行翻转,从而取料机构30将物料109从旋转轴体2042上取放至取料机构30,实现物料109的转移。由于旋转轴体2042将物料109通过真空吸附在其表面,因此旋转轴体2042在翻转过程中,物料109不会因重力而脱离旋转轴体2042。
89.通过使用本技术的物料摆盘系统100,可实现人力节省,同时提高了生产的良率和生产的效率。
90.本技术领域的普通技术人员应当认识到,以上的实施方式仅是用来说明本技术,而并非用作为对本技术的限定,只要在本技术的实质精神范围之内,对以上实施例所作的适当改变和变化都落在本技术要求保护的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。