1.本实用新型涉及自动驾驶技术领域,特别是关于一种园区智能车辆自动驾驶车辆电源设备。
背景技术:
2.园区场景具有道路环境较为简单,结构化程度高,行驶路线较为固定等特点,是智能汽车自动驾驶技术重要的且难度最小的落地应用场景。目前,园区自动驾驶技术已经成功应用于景区观光代步、仓储物流配送、园区环卫清扫等限定区域场景,加速了自动驾驶技术的落地与产业化应用。
3.但园区自动驾驶技术也面临着诸多挑战。在自动驾驶系统架构方面,为便于系统升级,可扩展性是自动驾驶系统架构设计需考虑的重要因素,随着自动驾驶系统感知决策算法智能化程度的不断提高,对硬件平台算力的需求也不断提高。而园区智能车辆受限于车辆体积和车辆续航里程的要求,自动驾驶系统设备的最大供电功率将受到约束,因此,为给自动驾驶系统所有设备提供稳定可靠的电力,对园区智能车辆电源系统部署提出了挑战。
技术实现要素:
4.本实用新型的目的在于提供一种园区智能车辆自动驾驶系统架构来克服或至少减轻现有技术的上述缺陷中的至少一个。
5.为实现上述目的,本实用新型提供一种园区智能车辆自动驾驶车辆电源设备,其包括主电源和副电源,其中,所述主电源通过车载动力源充电,所述副电源通过主电源充电,所述副电源依序通过上层开关和充电开关与所述主电源连接,所述上层直流供电总线中的稳压电源a和b,分别连接到所述上层开关和充电开关之间、所述副电源的输出端,所述底层直流供电总线的输入端通过下层开关连接到所述主电源与上层开关之间,所述交流供电总线的输出端与所述副电源的输出端之间设逆变器,输出220v交流电。
6.进一步地,所述下层开关处于闭合状态的情形下,为所述下层直流供电总线输出12v直流电;所述上层开关处于闭合状态的情形下,所述上层直流供电总线输出12v直流电,所述逆变器处于启动状态的情形下,所述交流供电总线输出 220v交流电压。
7.进一步地,所述稳压电源a通过处于闭合状态的所述上层开关与定位设备、感知设备、路由器和交换机电流连通。
8.进一步地,所述稳压电源b通过同时处于闭合状态的所述上层开关和所述充电开关与显示器和计算平台电流连通。
9.进一步地,所述逆变器通过同时处于闭合状态的所述上层开关和所述充电开关与人机交互平台和通信设备电流连通。
10.进一步地,所述主电源通过处于闭合状态的所述下层开关与单片机和散热风扇电流连通。
11.本实用新型通过双电源系统为所有设备提供稳定可靠的电力。
附图说明
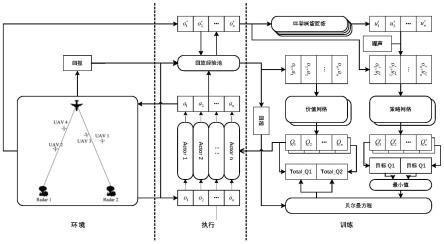
12.图1为本实用新型实施例提供的园区智能车辆自动驾驶系统架构原理图。
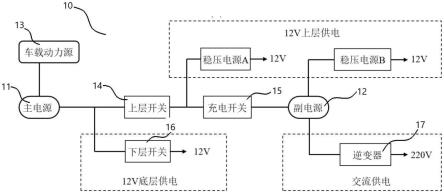
13.图2为本实用新型实施例提供的自动驾驶系统电源设备的原理示意图。
14.图3为本实用新型实施例提供的自动驾驶系统电源设备的连接实例图。
具体实施方式
15.下面结合附图和实施例对本实用新型进行详细的描述。
16.如图1所示,本实用新型实施例所提供的园区智能车辆自动驾驶系统架构包括交换机1、计算平台2、底层控制器3、感知设备4、定位设备5、通信设备7 和人机交互平台8。
17.交换机1与计算平台2信息交互,底层控制器3通过串口连接方式与计算平台2信息交互。感知设备4和定位设备5通过交换机1向计算平台2输送信息。所有外接自动驾驶系统相关的计算平台2、感知设备4、定位设备5、通信设备7 等,都通过交换机1实现星型拓扑的以太网通信。定位设备5可以包括gnss接收机和惯性导航系统,但不限于此。底层控制器3和gnss接收机通过串口与计算平台2连接。gnss接收机支持多系统信号(北斗、gps、glonass)联合联合定位定向,也可单系统定位定向。本实用新型涉及的定位设备可实现两种定位模式:一种是双天线gnss定位模式,适用于卫星信号无遮挡场景;一种是gnss 和惯性导航系统组合定位模式,适用于卫星信号受树木、建筑等遮挡造成信号丢失的场景。惯性导航系统向交换机1输送信息。
18.显示设备6与计算平台2之间可通过dvi(digital visual interface)、 hdmi(high definition multimedia interface)、vga(video graphic array) 中任意一种接口方式进行连接。底层控制器3通过can(controller area network,控制器局域网络)总线连接车辆网关,实现与车辆线控底盘的数据交互。紧急停车按钮和模式切换按钮以开关信号的形式输入到底层控制器3。周围其他车辆通过dsrc(dedicated short-range communication,专用短程通信技术)、lte-v (long term evolution-vehicle to everything,基于无线蜂窝通信的车联网技术)、wifi(wireless fidelity)中任意一种方式与车载通信设备连接,实现车车通信功能。
19.人机交互平台8通过通信设备7向计算平台2输送信息。利用无线路由器组建车辆局域网,人机交互平台8通过wifi连接局域网实现与计算平台2之间的数据交互。通过人机交互平台8可以实现多种控制模式选择和观测到车辆运行状态和系统预警提示信息。本实用新型涉及的自动驾驶系统控制方法能将系统运行状态通过人机交互平台呈现给乘员,同时也可实现车辆的远程控制。
20.本实用新型实施例提出的自动驾驶系统架构实现了所有设备之间便捷的连接,为自动驾驶系统升级提供扩展的空间。所有外接智能网联驾驶相关的计算设备、感知设备、定位设备、通信设备等都通过一台交换机实现星型拓扑的以太网通信。外接系统通过底层控制器实现和计算平台间的高可靠性通信,以完成车辆底层信息的读取及控制指令的发送。
21.在一个实施例中,如图2所示,为满足自动驾驶系统所包含设备的电力需求,为所有设备提供稳定可靠的电力,电源设备10提供彼此独立的三条供电线路,分别为上层直流
供电总线、底层直流供电总线以及交流供电总线,例如图2中示出的分别为12v上层直流供电总线、12v底层供电总线以及220v交流供电总线。
22.电源设备10包括主电源11、副电源12和供电线路控制单元,其中,所述主电源11通过车载动力源13充电,车载动力源13可以是发动机或驱动电机。副电源12通过主电源11充电。
23.电源设备10需要考虑自动驾驶系统所有需电源设备的正常工作的功率范围 d
p
、电压需求dv和稳压需求ds,所设计电源设备需同时满足所有需电源设备这三方面的需求。鉴于此,所述供电线路控制单元包括工作电压需求判断子单元和用电设备工作功率需求判断子单元。
24.工作电压需求判断子单元用于判断工作电压需求dv。用电设备工作功率需求判断子单元用于根据所述工作电压需求判断子单元的判定结果,以及用电设备正常工作功率需求d
p
和额定功率p1的比较结果,确定一所述供电线路,其中,p1根据主电源11和副电源12的额定功率大小进行确定。
25.在一个实施例中,副电源12依序通过上层开关14和充电开关15与主电源 11连接,上层开关14和充电开关15串联。上层直流供电总线中的稳压电源a 和b,分别连接到所述上层开关14和充电开关15之间、副电源12的输出端,所述底层直流供电总线的输入端通过下层开关16连接到主电源11与上层开关 14之间,所述交流供电总线的输出端与所述副电源12的输出端之间设逆变器17,输出220v交流电。
26.外接的自动驾驶相关的计算设备、感知设备、定位设备、通信设备功率需求较大,因此在供电之前需要启动车载动力源13为主电源11供电。为保证副电源 12工作过程保持足够供电能力,也需要为其充电。
27.12v上层直流供电总线可由主电源11和副电源12分别提供电能,当上层开关14闭合,主电源11通过稳压电源a提供12v直流电。副电源12直接通过稳压电源b提供12v直流电。当上层开关14断开时,副电源12可以继续为上层直流供电总线提供12v直流电。12v上层直流供电总线主要为自动驾驶及车联网相关设备供电,如定位设备、感知设备、计算平台和路由器等。
28.底层控制器3主要实现智能车辆自动驾驶系统相关设备和计算平台间的高可靠性通信,并完成车辆底层信息的读取及控制指令的发送,其功能重要等级最高,而且底层控制器对电磁干扰最敏感,则供电优先级最高。12v底层供电总线通过下层开关16与主电源11连接,为底层控制器3供电。底层控制器单独3 的供电线路减少了上层供电线路状态对底层的影响,提高了底层控制的可靠性。
29.220v交流供电主要为调试设备(笔记本电能)等供电,启动优先级最低。 220v交流供电总线通过逆变器7与副电源12连接,能够满足自动驾驶系统所包含设备对220v交流电的需求。
30.因此,电源设备10上电顺序包括:
31.优先闭合下层开关16,为所述底层控制器3提供12v直流电;其次,启动车载动力源13为主电源11充电;再其次闭合上层开关14为上层直流供电总线提供12v直流电,同时闭合充电开关15为副电源12充电;最后启动逆变器7,通过交流供电总线提供220v电压。该操作顺序的设置,主要是针对本实用新型中提出的电源设备,考虑设备功能重要程度及相互之
间电磁干扰问题制定了电源开关闭合优先级,确保所有设备都能稳定可靠工作。
32.自动驾驶系统需要电源设备包括计算平台、底层控制器、定位设备、感知设备、车载通信设备、人机交互平台、显示设备及交换机。本专利中所设计的电源设备需要满足各设备的电力需求,自动驾驶系统中各设备的电力需求如下表:
[0033][0034]
设计的电源设备需同时满足自动驾驶系统中各设备功率需求、电压需求和稳压需求。从功率范围角度,计算平台(工控机)、车载通信设备(lte/dsrc)和显示设备(显示器)正常工作时功率需求较大,为保证稳定可靠的电力供应,需要设计独立的电源进行供电;从电压需求角度,电源设备需同时提供12v直流和 220v交流电压;从稳压需求角度,底层控制器(单片机)、底层控制器(散热风扇)和车载通信设备(lte/dsrc)无稳压需求,其他设备对电源品质要求较高,需要经过稳压。
[0035]
在一个实施例中,所述用电设备工作功率需求判断子单元在判定dv为12v 直流的情形下,分为如下三种情形确定所述供电线路:
[0036]
情形一,d
p
<p1,所述供电线路为所述底层直流供电总线;
[0037]
情形二,d
p
<p1,所述供电线路为所述上层直流供电总线中的稳压电源a;
[0038]
情形二,d
p
≥p1,所述供电线路为所述上层直流供电总线中的稳压电源b;
[0039]
所述用电设备工作功率需求判断子单元在判定dv为220v交流的情形下,且 d
p
≥p1,所述供电线路为所述交流供电总线。
[0040]
其中p1可根据主电源和副电源的额定功率大小进行确定。如果主电源为车辆启动电源,考虑到车辆启动时需要主电源提供较大功率,则通常p1取较小值,其取值范围为20w-30w。
[0041]
根据以上原则,本实用新型所提出的自动驾驶系统架构所包含的各设备具体供电方式如图3所示。
[0042]
1)底层直流供电总线可满足底层控制器(单片机)和底层控制器(散热风扇)在功
率范围和电压供应两方面的需求,鉴于单片机自带外围稳压电路,故对供应电源无稳压需求;
[0043]
2)上层直流供电总线可满足定位设备、感知设备、计算平台、显示器、交换机和路由器在功率范围、电压供应和电压稳定性三方面的需求;
[0044]
3)交流供电总线可满足通信设备和人机交互平台在功率范围、电压供应和电压稳定性三方面的需求。
[0045]
最后需要指出的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制。本领域的普通技术人员应当理解:可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。