1.本发明涉及数据处理技术领域,特别是湿度控制方法和装置。
背景技术:
2.在生活和生产中,有一些环境对湿度的要求较高,例如:存放药剂的药剂箱,要保持药剂的活性,必须将药剂箱的湿度控制在一定范围内,且湿度越稳定越好,在这些环境中通常采用湿度产生器如:加湿器来保持环境湿度,当湿度过低时,打开湿度产生器,当湿度过高时,关闭湿度产生器。图1为药剂箱的结构示意图,其中,11为药剂箱的箱体背面结构示意图,12为药剂箱的箱体柜内结构示意图,111为湿度产生器,用于为箱体加湿;112为风机,风机匀速转动,以保持箱体内部湿度和温度均匀;121为加热器,用于为箱体加热;122为冷凝器,用于降温和除湿。
3.目前,通常采用pid(proportion integration differentiation,比例积分微分)整定方法对环境中的湿度产生器进行开关控制,从而达到对环境湿度的控制。其中,采用湿度传感器采集环境内的湿度信号,将湿度信号输入pid控制器,采用pid控制器输出的占空比信号控制湿度产生器的开关。但是,常规的pid整定方法对低湿环境具有较好的控制效果,在高湿环境下,由于受湿度传感器的采集精度等诸多因素影响,系统扰动逐渐加大,导致控制后的湿度波动度较大。
4.图2为采用常规pid整定方法对低湿环境进行湿度控制后,湿度波动情况示意图。图3为采用常规pid整定方法对高湿环境进行湿度控制后,湿度波动情况示意图。图2和图3的横轴都为时间t,单位为s(秒),纵轴都为rh(relative humidity,相对湿度)。可见,图3的湿度波动明显高于图2。
5.目前还存在采用模糊控制方法进行湿度控制的方案,但是这些方案对于模糊控制的输出参数的论域没有明确的取值范围确定方法,输出参数的论域通常都是人为手动反复尝试确定的,这就导致最终的湿度控制效果无法达到最佳。
技术实现要素:
6.有鉴于此,本发明实施例提出湿度控制方法和装置,以提高湿度控制的效率和稳定性;
7.本发明实施例还提出非瞬时计算机可读存储介质、计算机程序产品和电子设备,以提高湿度控制的效率和稳定性。
8.本发明实施例的技术方案是这样实现的:
9.一种湿度控制方法,该方法包括:
10.获取湿度整定目标值和占空比基准值;
11.根据湿度整定目标值和占空比基准值,采用延迟型继电器方式控制被控环境中的湿度产生器的开关;
12.当采集的被控环境内的湿度信号在连续预设第一数目个周期内振荡时,根据所述
第一数目个周期内的湿度信号和在该第一数目个周期内延迟型继电器输出的占空比信号,计算每个周期的临界增益和临界周期,根据每个周期的临界增益和临界周期,分别计算每个周期的比例参数kp、积分参数ki和微分参数kd,根据计算出的kp的最小值和最大值、ki的最小值和最大值以及kd的最小值和最大值,确定kp、ki和kd的论域;
13.确定e和ec的论域,根据e、ec、kp、ki和kd的论域,对采集的被控环境内的湿度信号进行模糊控制处理,得到kp、ki和kd;其中,e为采集的被控环境内的当前湿度信号与前一湿度信号的差,ec为当前湿度信号的变化率;
14.根据kp、ki和kd对采集的被控环境内的湿度信号进行比例积分微分pid控制处理,根据得到的占空比信号控制被控环境中的湿度产生器的开关。
15.所述获取湿度整定目标值和占空比基准值,包括:
16.将采集的被控环境内的湿度信号输入到pid控制器进行pid控制处理,当采集的被控环境内的湿度信号在预设第一时长内稳定在第一范围内时,停止pid控制,并计算在最近第一时长内采集的被控环境内的湿度信号的湿度均值以及pid控制器在所述第一时长内输出的占空比信号的占空比均值;
17.将所述湿度均值作为所述湿度整定目标值,将所述占空比均值作为所述占空比基准值。
18.所述根据湿度整定目标值和占空比基准值,采用延迟型继电器方式控制被控环境中的湿度产生器的开关,包括:
19.默认采用占空比基准值对应的占空比信号控制湿度产生器的开关;
20.当检测到被控环境内的湿度信号高于湿度整定目标值加上预设第一步长时,开始采用占空比基准值减去预设第二步长对应的占空比信号作为延迟型继电器的输出控制湿度产生器的开关;
21.当检测到被控环境内的湿度信号低于湿度整定目标值减去预设第一步长时,开始采用占空比基准值加上预设第二步长对应的占空比信号作为延迟型继电器的输出控制湿度产生器的开关;
22.当检测到被控环境内的湿度信号不低于湿度整定目标值减去预设第一步长且不高于湿度整定目标值加上预设第一步长时,恢复采用占空比基准值对应的占空比信号作为延迟型继电器的输出控制湿度产生器的开关。
23.所述计算每个周期的临界增益和临界周期,包括:
24.对于任一周期,计算该周期的占空比信号的波峰和波谷之间的距离,设为第一距离,计算该周期的湿度信号的波峰和波谷之间的距离,设为第二距离,计算该周期的临界增益=4*所述第一距离/(兀*所述第二距离),并将该周期的时长作为该周期的临界周期。
25.所述根据每个周期的临界增益和临界周期,分别计算每个周期的kp、ki和kd,包括:
26.对于任一周期,该周期的kp=0.6*该周期的临界增益,该周期的ki=1.2*该周期的临界增益/该周期的临界周期,该周期的kd=0.075*该周期的临界增益*该周期的临界周期。
27.所述根据e、ec、kp、ki和kd的论域,对采集的被控环境内的湿度信号进行模糊控制处理,包括:
28.分别将e、ec、kp、ki和kd的论域划分为多个模糊子集;
29.确定当前e所属的模糊子集,计算当前e对其所属模糊子集的两个隶属值的隶属度;
30.确定当前ec所属的模糊子集,计算当前ec对其所属模糊子集的两个隶属值的隶属度;
31.根据预设的模糊规则以及当前e所属的模糊子集、当前ec所属的模糊子集,确定当前kp、当前ki和当前kd分别所属的模糊子集;
32.分别计算当前kp、当前ki和当前kd对各自所属模糊子集的两个隶属值的隶属度;
33.分别根据当前kp、当前ki和当前kd分别所属的模糊子集以及当前kp、当前ki和当前kd对各自所属模糊子集的两个隶属值的隶属度,计算当前kp、当前ki和当前kd。
34.一种湿度控制装置,该装置包括:
35.论域获取模块,用于获取湿度整定目标值和占空比基准值;根据湿度整定目标值和占空比基准值,采用延迟型继电器方式控制被控环境中的湿度产生器的开关;当采集的被控环境内的湿度信号在连续预设第一数目个周期内振荡时,根据所述第一数目个周期内的湿度信号和在该第一数目个周期内延迟型继电器输出的占空比信号,计算每个周期的临界增益和临界周期,根据每个周期的临界增益和临界周期,分别计算每个周期的比例参数kp、积分参数ki和微分参数kd,根据计算出的kp的最小值和最大值、ki的最小值和最大值以及kd的最小值和最大值,确定kp、ki和kd的论域;
36.模糊控制器,用于根据e、ec、kp、ki和kd的论域,对采集的被控环境内的湿度信号进行模糊控制处理,得到kp、ki和kd;其中,e为采集的被控环境内的当前湿度信号与前一湿度信号的差,ec为当前湿度信号的变化率;
37.pid控制器,用于根据kp、ki和kd对采集的被控环境的湿度信号进行比例积分微分pid控制处理,处理得到的占空比信号用于控制被控环境中的湿度产生器的开关。
38.一种非瞬时计算机可读存储介质,所述非瞬时计算机可读存储介质存储指令,所述指令在由处理器执行时使得所述处理器执行如上任一项所述的湿度控制方法的步骤。
39.一种计算机程序产品,包括计算机程序或指令,该计算机程序或指令被处理器执行时实现如上任一项所述的湿度控制方法的步骤。
40.一种电子设备,包括:处理器和存储器,其中:
41.存储器存储有程序,所述程序配置为在被所述处理器执行时使得所述处理器执行如上任一项所述的湿度控制方法的步骤。
42.本发明实施例通过采用延迟型继电器方式控制湿度产生器的开关,当检测到被控环境内的湿度信号周期性振荡时,根据多个振荡周期内的湿度信号和在该多个振荡周期内延迟性继电器输出的占空比信号,计算每个周期的临界增益和临界周期,根据每个周期的临界增益和临界周期,确定kp、ki和kd的论域,然后根据kp、ki和kd的论域,对被控环境内的湿度信号进行模糊控制处理,根据模糊控制得到的kp、ki和kd对被控环境内的湿度信号进行pid控制处理,根据得到的占空比信号控制被控环境中的湿度产生器的开关,从而实现了对kp、ki和kd的论域的自动、准确获取,进而提高了湿度控制的效率和稳定性。
附图说明
43.下面将通过参照附图详细描述本发明的优选实施例,使本领域的普通技术人员更清楚本发明的上述及其它特征和优点,附图中:
44.图1为药剂箱的结构示意图;
45.图2为采用常规pid整定方法对低湿环境进行湿度控制后,湿度波动情况示意图;
46.图3为采用常规pid整定方法对高湿环境进行湿度控制后,湿度波动情况示意图;
47.图4为本发明实施例提供的湿度控制方法流程图;
48.图5为本发明一应用实例中的周期性振荡的湿度信号的示意图;
49.图6为图5的湿度信号对应的占空比信号的示意图;
50.图7为本发明一应用实例采用的e、ec、ki、kp和kd的隶属度函数的示意图;
51.图8为本发明实施例提供的湿度控制装置的结构示意图。
52.其中,附图标记如下:
53.标号含义11药剂箱的箱体背面结构示意图12药剂箱的箱体柜内结构示意图111湿度产生器112风机121加热器122冷凝器401-405步骤80湿度控制装置81论域获取模块82模糊控制器83pid控制器
具体实施方式
54.为使本发明的目的、技术方案和优点更加清楚,以下举实施例对本发明进一步详细说明。
55.图4为本发明实施例提供的湿度控制方法流程图,其具体步骤如下:
56.步骤401:获取湿度整定目标值和占空比基准值。
57.步骤402:根据湿度整定目标值和占空比基准值,采用延迟型继电器方式控制被控环境中的湿度产生器的开关。
58.步骤403:当采集的被控环境内的湿度信号在连续预设第一数目个周期内振荡时,根据第一数目个周期内的湿度信号和在该第一数目个周期内延迟型继电器输出的占空比信号,计算每个周期的临界增益和临界周期,根据每个周期的临界增益和临界周期,分别计算每个周期的kp(比例参数)、ki(积分参数)和kd(微分参数),根据计算出的kp的最小值和最大值、ki的最小值和最大值以及kd的最小值和最大值,确定kp、ki和kd的论域。
59.第一数目的具体取值可根据经验等确定,例如:一应用实例中,第一数目为15。
60.步骤404:确定e和ec的论域,根据e、ec、kp、ki和kd的论域,对采集的被控环境内的
湿度信号进行模糊控制处理,得到kp、ki和kd;其中,e为采集的被控环境内的当前湿度信号与前一湿度信号的差,ec为当前湿度信号的变化率。
61.模糊控制方法可根据经验等选择,例如可选择mamdani方法。
62.另外,在实际应用中,步骤404中,在对采集的被控环境内的湿度信号进行模糊控制处理时,湿度信号的采集周期可根据经验等确定,例如:湿度信号的采集周期可为2s(秒),即每2s采集一次被控环境内的湿度信号,并对采集的湿度信号进行模糊控制处理。
63.步骤405:根据kp、ki和kd对采集的被控环境内的湿度信号进行pid控制处理,根据得到的占空比信号控制被控环境中的湿度产生器的开关。
64.在实际应用中,步骤405中,根据kp、ki和kd对采集的被控环境内的湿度信号进行pid控制处理时,pid控制器采集kp、ki和kd的周期和输出占空比信号的周期可根据经验等确定,例如:pid控制器采集kp、ki和kd的周期和输出占空比信号的周期可为0.7s。
65.一可选实施例中,pid控制可采用基本的一自由度结构,即无比例和微分权重。
66.其中,通过步骤401-403确定kp、ki和kd的论域的过程可只执行一次,此后,除非对湿度的要求发生改变,否则,一直采用步骤401-403确定的kp、ki和kd的论域执行步骤404-405来实现对被控环境内的湿度信号的控制。
67.上述实施例中,通过采用延迟型继电器方式控制湿度产生器的开关,当被控环境内的湿度信号周期性振荡时,根据多个振荡周期内的湿度信号和占空比信号,计算每个周期的临界增益和临界周期,根据每个周期的临界增益和临界周期,确定kp、ki和kd的论域,然后根据kp、ki和kd的论域,对被控环境内的湿度信号进行模糊控制处理,根据模糊控制得到的kp、ki和kd对被控环境内的湿度信号进行pid控制处理,从而实现了对kp、ki和kd的论域的自动、准确获取,进而提高了湿度控制的效率和稳定性。
68.一可选实施例中,步骤401具体包括:将采集的被控环境内的湿度信号输入到pid控制器进行pid控制处理,当采集的被控环境内的湿度信号在预设第一时长内稳定在第一范围内时,停止pid控制,并计算在最近第一时长内采集的被控环境内的湿度信号的湿度均值以及pid控制器在第一时长内输出的占空比信号的占空比均值;将湿度均值作为湿度整定目标值,将占空比均值作为占空比基准值。
69.一可选实施例中,步骤402可采用ziegler-nichols(齐格勒-尼科尔斯)法实现,具体包括:默认采用占空比基准值对应的占空比信号控制湿度产生器的开关;当检测到被控环境内的湿度信号高于湿度整定目标值加上预设第一步长时,开始采用占空比基准值减去预设第二步长对应的占空比信号作为延迟型继电器的输出控制湿度产生器的开关;当检测到被控环境内的湿度信号低于湿度整定目标值减去预设第一步长时,开始采用占空比基准值加上预设第二步长对应的占空比信号作为延迟型继电器的输出控制湿度产生器的开关;当检测到被控环境内的湿度信号不低于湿度整定目标值减去预设第一步长且不高于湿度整定目标值加上预设第一步长时,恢复采用占空比基准值对应的占空比信号作为延迟型继电器的输出控制湿度产生器的开关。
70.其中,第一步长、第二步长的取值可根据经验等确定。在一应用实例中,第二步长可采用占空比基准值的25%。
71.一可选实施例中,步骤403中,计算每个周期的临界增益和临界周期,包括:对于任一周期,计算该周期内的占空比信号的波峰和波谷之间的距离,设为第一距离,计算该周期
的湿度信号的波峰和波谷之间的距离,设为第二距离,计算该周期的临界增益=4*第一距离/(兀*所述第二距离),并将该周期的时长作为该周期的临界周期。
72.图5为本发明一应用实例中的周期性振荡的湿度信号的示意图,其中,横坐标为时间t,单位为s,纵坐标为rh;图6为图5的湿度信号对应的占空比(duty)信号的示意图,其中,横坐标为时间t,单位为s,纵坐标为占空比。
73.一可选实施例中,步骤403中,根据每个周期的临界增益和临界周期,分别计算每个周期的kp、ki和kd,包括:对于任一周期,该周期的kp=0.6*该周期的临界增益,该周期的ki=1.2*该周期的临界增益/该周期的临界周期,该周期的kd=0.075*该周期的临界增益*该周期的临界周期。
74.一可选实施例中,步骤404中,根据e、ec、kp、ki和kd的论域,对采集的被控环境内的湿度信号进行模糊控制处理,包括:
75.步骤4041:分别将e、ec、kp、ki和kd的论域划分为多个模糊子集。
76.其中,e和ec的论域可根据经验等确定,例如:e=[-5.0,5.0],ec=[-5.0,5.0]。在一应用实例中,例如,根据临界增益和临界周期计算出的kp、ki、kd的论域为:kp=[4.0,5.0],ki=[0.0084,0.042],kd=[2.6,3.7]。
[0077]
在为e、ec、kp、ki和kd的论域划分模糊子集时,需要先根据它们的论域,计算出它们的隶属值:nb(negative big,负大)、nm(negative medium,负中)、ns(negative small,负小)、ps(positive small,正小)、pm(positive medium,正中)和pb(positive big,正大),然后根据它们各自的nb、nm、ns、zo、ps、pm和pb将它们的论域分别划分为6个模糊子集:[nb,nm)、[nm,ns)、[ns,zo)、[zo,ps)、[ps,pm)和[pm,pb)。以e为例,设e的论域为:e=[-5.0,5.0],则e的nb=-5、nm=-10/3、ns=-5/3、ps=5/3、pm=10/3、pb=5,则e的论域共划分为6个模糊子集,分别为:[-5,-10/3),[-10/3,-5/3),[-5/3,0),[0,5/3),[5/3,10/3),[10/3,5]。
[0078]
步骤4042:确定当前e所属的模糊子集,计算当前e对其所属模糊子集的两个隶属值的隶属度。
[0079]
例如:根据当前湿度采集周期采集的湿度信号和上一湿度采集周期采集的湿度信号,计算出当前e=e0,e0∈模糊子集[ps,pm),当前e对其所属模糊子集中的隶属值ps的隶属度为:(e0-ps)/ps,当前e对其所属模糊子集中的隶属值pm的隶属度为:(pm-e0)/pm。
[0080]
步骤4043:确定当前ec所属的模糊子集,计算当前ec对其所属模糊子集的两个隶属值的隶属度。
[0081]
步骤4044:根据预设的模糊规则以及当前e所属的模糊子集、当前ec所属的模糊子集,确定当前kp、当前ki和当前kd分别所属的模糊子集。
[0082]
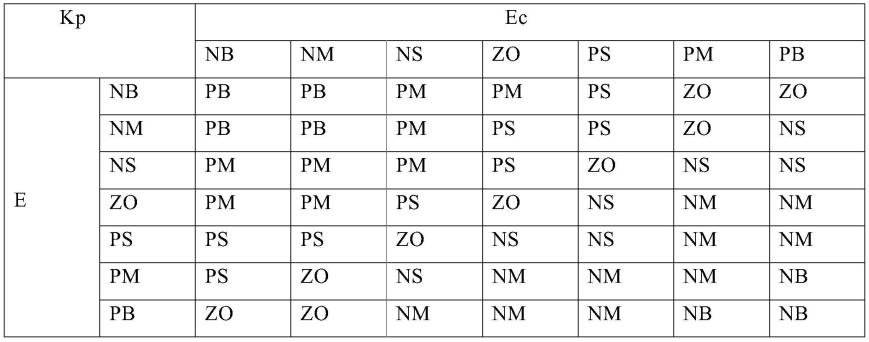
表1为本发明一应用实例中采用的kp与e和ec之间的模糊规则:
[0083][0084]
表1表2为本发明一应用实例中采用的ki与e和ec之间的模糊规则:
[0085][0086]
表2表3为本发明一应用实例中采用的kd与e和ec之间的模糊规则:
[0087][0088][0089]
表3
[0090]
如表1-3所示,当当前e∈模糊子集[ps,pm),当前ec∈模糊子集[pm,pb)时,则根据表1得知:e为ps、ec为pm时,ki为pm;e为ps、ec为pb时,ki为pb;e为pm、ec为pm时,ki为pb;e为pm、ec为pb时,ki为pb。则当前ki∈模糊子集[pm,pb]。
[0091]
步骤4045:分别计算当前kp、当前ki和当前kd对各自所属模糊子集的两个隶属值的隶属度。
[0092]
例如:当当前e∈模糊子集[ps,pm),当前ec∈模糊子集[pm,pb)时,则根据表1得知:e为ps、ec为pm时,ki为pm;e为ps、ec为pb时,ki为pb;e为pm、ec为pm时,ki为pb;e为pm、ec
为pb时,ki为pb。设当前e属于ps的隶属度为a,则当前e属于pm的隶属度为1-a,设当前ec属于pm的隶属度为b,则当前ec属于pb的隶属度为1-b,则当前ki属于pm的隶属度为a*b,当前ki属于pb的隶属度为a*(1-b) (1-a)*b (1-a)*(1-b)。
[0093]
图7为本发明一应用实例采用的e、ec、ki、kp和kd的隶属度函数的示意图,横坐标为e、ec、ki、kp或kd的取值,纵坐标为隶属度。此时,采用的隶属度函数为trimf。
[0094]
步骤4046:分别根据当前kp、当前ki和当前kd分别所属的模糊子集以及当前kp、当前ki和当前kd对各自所属模糊子集的两个隶属值的隶属度,计算当前kp、当前ki和当前kd。
[0095]
例如:当当前e∈模糊子集[ps,pm),当前ec∈模糊子集[pm,pb)时,则根据表1得知:e为ps、ec为pm时,ki为pm;e为ps、ec为pb时,ki为pb;e为pm、ec为pm时,ki为pb;e为pm、ec为pb时,ki为pb。设当前e属于ps的隶属度为a,则当前e属于pm的隶属度为1-a,设当前ec属于pm的隶属度为b,则当前ec属于pb的隶属度为1-b,则当前ki属于pm的隶属度为a*b,当前ki属于pb的隶属度为a*(1-b) (1-a)*b (1-a)*(1-b),则当前ki=(1-b)*ki的pm (a*(1-b) (1-a)*b (1-a)*(1-b))*ki的pb。
[0096]
kp和kd的计算过程同ki。
[0097]
图8为本发明实施例提供的湿度控制装置80的结构示意图,该装置80主要包括:
[0098]
论域获取模块81,用于获取湿度整定目标值和占空比基准值;根据湿度整定目标值和占空比基准值,采用延迟型继电器方式控制被控环境中的湿度产生器的开关;当采集的被控环境内的湿度信号在连续预设第一数目个周期内振荡时,根据第一数目个周期内的湿度信号和在该第一数目个周期内延迟型继电器输出的占空比信号,计算每个周期的临界增益和临界周期,根据每个周期的临界增益和临界周期,分别计算每个周期的比例参数kp、积分参数ki和微分参数kd,根据计算出的kp的最小值和最大值、ki的最小值和最大值以及kd的最小值和最大值,确定kp、ki和kd的论域。
[0099]
模糊控制器82,用于根据e、ec、kp、ki和kd的论域,对采集的被控环境内的湿度信号进行模糊控制处理,得到kp、ki和kd;其中,e为采集的被控环境内的当前湿度信号与前一湿度信号的差,ec为当前湿度信号的变化率。
[0100]
pid控制器83,用于根据kp、ki和kd对采集的被控环境的湿度信号进行比例积分微分pid控制处理,处理得到的占空比信号用于控制被控环境中的湿度产生器的开关。
[0101]
一可选实施例中,论域获取模块81获取湿度整定目标值和占空比基准值,包括:将采集的被控环境内的湿度信号输入到pid控制器进行pid控制处理,当采集的被控环境内的湿度信号在预设第一时长内稳定在第一范围内时,停止pid控制,并计算在最近第一时长内采集的被控环境内的湿度信号的湿度均值以及pid控制器在第一时长内输出的占空比信号的占空比均值;将湿度均值作为湿度整定目标值,将占空比均值作为占空比基准值。
[0102]
一可选实施例中,论域获取模块81根据湿度整定目标值和占空比基准值,采用延迟型继电器方式控制被控环境中的湿度产生器的开关,包括:默认采用占空比基准值对应的占空比信号控制湿度产生器的开关;当检测到被控环境内的湿度信号高于湿度整定目标值加上预设第一步长时,开始采用占空比基准值减去预设第二步长对应的占空比信号作为延迟型继电器的输出控制湿度产生器的开关;当检测到被控环境内的湿度信号低于湿度整定目标值减去预设第一步长时,开始采用占空比基准值加上预设第二步长对应的占空比信号作为延迟型继电器的输出控制湿度产生器的开关;当检测到被控环境内的湿度信号不低
于湿度整定目标值减去预设第一步长且不高于湿度整定目标值加上预设第一步长时,恢复采用占空比基准值对应的占空比信号作为延迟型继电器的输出控制湿度产生器的开关。
[0103]
一可选实施例中,论域获取模块81计算每个周期的临界增益和临界周期,包括:对于任一周期,计算该周期的占空比信号的波峰和波谷之间的距离,设为第一距离,计算该周期的湿度信号的波峰和波谷之间的距离,设为第二距离,计算该周期的临界增益=4*第一距离/(兀*第二距离),并将该周期的时长作为该周期的临界周期。
[0104]
一可选实施例中,论域获取模块81根据每个周期的临界增益和临界周期,分别计算每个周期的kp、ki和kd,包括:
[0105]
对于任一周期,该周期的kp=0.6*该周期的临界增益,该周期的ki=1.2*该周期的临界增益/该周期的临界周期,该周期的kd=0.075*该周期的临界增益*该周期的临界周期。
[0106]
一可选实施例中,模糊控制器82根据e、ec、kp、ki和kd的论域,对采集的被控环境内的湿度信号进行模糊控制处理,包括:分别将e、ec、kp、ki和kd的论域划分为多个模糊子集;确定当前e所属的模糊子集,计算当前e对其所属模糊子集的两个隶属值的隶属度;确定当前ec所属的模糊子集,计算当前ec对其所属模糊子集的两个隶属值的隶属度;根据预设的模糊规则以及当前e所属的模糊子集、当前ec所属的模糊子集,确定当前kp、当前ki和当前kd分别所属的模糊子集;分别计算当前kp、当前ki和当前kd对各自所属模糊子集的两个隶属值的隶属度;分别根据当前kp、当前ki和当前kd分别所属的模糊子集以及当前kp、当前ki和当前kd对各自所属模糊子集的两个隶属值的隶属度,计算当前kp、当前ki和当前kd。
[0107]
本发明实施例还提供一种非瞬时计算机可读存储介质,非瞬时计算机可读存储介质存储指令,指令在由处理器执行时使得处理器执行如上任一项所述的湿度控制方法的步骤。
[0108]
本发明实施例还提供一种计算机程序产品,包括计算机程序或指令,该计算机程序或指令被处理器执行时实现如上任一项所述的湿度控制方法的步骤。
[0109]
本发明实施例还提供一种电子设备,包括:处理器和存储器,其中:存储器存储有程序,程序配置为在被处理器执行时使得处理器执行如上任一项所述的湿度控制方法的步骤。
[0110]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。