1.本发明涉及一种控制方法,尤其是一种传送式码垛机的控制方法。本发明还涉及利用上述控制方法的传送式码垛机。
背景技术:
2.传送式码垛机通常具有可以绕平行于地面的轴线转动的机械臂,传送装置设置于机械臂,通过电缸驱动机械臂转动可以调整传送装置的出口的高度。然而在机械臂转动过程中,传送装置的出口同时存在高度方向和水平方向的位移,使堆叠的物料在水平方向上逐渐偏离,不能将物料沿竖直方向整齐地堆叠。
技术实现要素:
3.本发明的目的是提供一种传送式码垛机的控制方法,能够控制传送式码垛机将物料沿竖直方向整齐地堆叠。
4.本发明的另一目的是提供一种传送式码垛机,能够将物料沿竖直方向整齐地堆叠。
5.本发明提供了一种传送式码垛机的控制方法,传送式码垛机包括一个移动装置、一个转动座、一个水平驱动装置、一个机械臂、一个升降驱动装置和一个传送装置,移动装置能够在水平驱动装置驱动下在一个工作平面上沿一个水平方向移动,转动座绕一个垂直于工作平面的第一轴线可转动地设置于移动装置,机械臂能够在升降驱动装置驱动下绕一个平行于工作平面且与第一轴线相交的第二轴线相对于移动装置转动,传送装置设置于机械臂并且具有一个沿垂直于第二轴线的输送方向伸出的传送出口。控制方法包括下列步骤:
6.设置一个能够控制水平驱动装置和升降驱动装置的控制单元;
7.将能够表示传送式码垛机的实际结构的结构参数输入控制单元;
8.利用控制单元获取传送出口到工作平面的目标高度和传送出口在垂直于水平方向的方向上的调整距离;并结合结构参数计算用于控制升降驱动装置的一个第一控制量和用于控制水平驱动装置的一个第二控制量;以及
9.利用控制单元根据第一控制量和第二控制量同时控制升降驱动装置和水平驱动装置,使传送出口移动到目标高度的同时保持传送出口沿垂直工作平面的直线运动。借此使物料沿竖直方向整齐地堆叠。
10.本发明提供的传送式码垛机的控制方法,设置一个能够同时控制水平驱动装置和升降驱动装置的控制单元,控制单元能够结合传送式码垛机的实际结构,计算传送装置的传送出口到达目标高度时水平驱动装置和升降驱动装置的控制量,并接下来同时控制水平驱动装置和升降驱动装置使传送出口移动到目标高度的同时保持传送出口沿垂直工作平面的直线运动。
11.在传送式码垛机的控制方法的另一种示意性实施方式中,升降驱动装置为电缸,
其一端绕一个平行于第二轴线的第三轴线可转动地连接于机械臂,另一端绕一个平行于第二轴线的第四轴线可转动地连接于移动装置。用于输入控制单元的结构参数包括第二轴线到工作平面的高度、第二轴线和第三轴线的公垂线的长度、第二轴线和第四轴线的公垂线的长度、传送出口到第一轴线和第二轴线的交点的线段的长度以及传送出口到工作平面的高度等于第二轴线到工作平面的高度时第二轴线和第三轴线的公垂线与第二轴线和第四轴线的公垂线的夹角值。
12.在传送式码垛机的控制方法的再一种示意性实施方式中,控制单元根据下列公式计算传送出口到目标高度时电缸的长度作为第一控制量:
13.l=√{(l32 l42)-2*l3*l4*cos(∠a ∠a2);
14.∠a2=arcsin[(h1-h0)/r];
[0015]
其中,l表示传送出口到目标高度时电缸的长度,l3表示第二轴线和第三轴线的公垂线的长度,l4表示第二轴线和第四轴线的公垂线的长度,∠a表示传送出口到工作平面的高度等于第二轴线到工作平面的高度时第二轴线和第三轴线的公垂线与第二轴线和第四轴线的公垂线的夹角值,∠a2表示传送出口到第一轴线和第二轴线的交点的线段与工作平面的夹角值,h1表示传送出口的目标高度,h0表示第二轴线到工作平面的高度,r表示传送出口到第一轴线和第二轴线的交点的线段的长度。
[0016]
在传送式码垛机的控制方法的另一种示意性实施方式中,控制单元根据下列公式计算传送出口到目标高度时传送出口在水平方向的偏移量作为第二控制量:
[0017]
l1=cos∠b*r*(1-cos∠a2);
[0018]
∠b=arcsin[y/(r*cos∠a2)];
[0019]
∠a2=arcsin[(h1-h0)/r];
[0020]
其中,l1表示传送出口到目标高度时传送出口在水平方向的偏移量,∠b表示转动座相对于第二轴线垂直于水平方向时转动的夹角值,y表示传送出口在垂直于水平方向的方向上的调整距离,∠a2表示传送出口到第一轴线和第二轴线的交点的线段与工作平面的夹角值,h1表示传送出口的目标高度,h0表示第二轴线到工作平面的高度,r表示传送出口到第一轴线和第二轴线的交点的线段的长度。
[0021]
在传送式码垛机的控制方法的另一种示意性实施方式中,控制方法还包括步骤:
[0022]
在传送出口在垂直于水平方向的方向上的调整距离将要发生变化前,利用控制单元获取传送出口在垂直于水平方向的方向上的目标调整距离;
[0023]
根据传送出口在垂直于水平方向的方向上的目标调整距离和结构参数计算用于控制水平驱动装置的一个第三控制量;以及
[0024]
利用控制单元根据第三控制量控制水平驱动装置,使转动座转动到目标角度位置的同时保持传送出口沿平行于工作平面且垂直于水平方向的直线运动。
[0025]
在传送式码垛机的控制方法的另一种示意性实施方式中,控制单元根据下列公式计算转动座转动到目标角度时传送出口在水平方向的偏移量作为第三控制量:
[0026]
l2=r*cos∠a2(1-cos∠b);
[0027]
∠b=arcsin[y/(r*cos∠a2)];
[0028]
∠a2=arcsin[(h1-h0)/r];;
[0029]
其中,l2表示转动座转动到目标角度时传送出口在水平方向的偏移量,∠b表示转
动座转动到目标角度时相对于第二轴线垂直于水平方向时转动的夹角值,y表示传送出口在垂直于水平方向的方向上的调整距离,∠a2表示传送出口到第一轴线和第二轴线的交点的线段与工作平面的夹角值,h1表示传送出口到工作平面的高度,h0表示第二轴线到工作平面的高度,r表示传送出口到第一轴线和第二轴线的交点的线段的长度。
[0030]
本发明还提供了一种传送式码垛机,包括一个移动装置、一个转动座、一个水平驱动装置、一个机械臂、一个升降驱动装置、一个传送装置以及一个控制单元。移动装置能够在一个工作平面上沿一个水平方向移动。转动座绕一个垂直于工作平面的第一轴线可转动地设置于移动装置。水平驱动装置能够驱动移动装置沿水平方向移动。机械臂绕一个平行于工作平面且与第一轴线相交的第二轴线可转动地设置于转动座。升降驱动装置能够驱动机械臂绕第二轴线转动。传送装置设置于机械臂并且具有沿一个垂直于第二轴线的输送方向伸出的传送出口。控制单元被配置为能够输入表示传送式码垛机的实际结构的结构参数,控制单元被配置为能够获取传送出口到工作平面的目标高度和传送出口在垂直于水平方向的方向上的调整距离,并结合结构参数计算用于控制升降驱动装置的一个第一控制量和用于控制水平驱动装置的一个第二控制量,控制单元还被配置为根据第一控制量和第二控制量同时控制升降驱动装置和水平驱动装置,使传送出口移动到目标高度的同时保持传送出口沿垂直工作平面的直线运动。
[0031]
本发明提供的传送式码垛机,具有一个能够同时控制水平驱动装置和升降驱动装置的控制单元,控制单元能够结合传送式码垛机的实际结构,计算传送装置的传送出口到达目标高度时水平驱动装置和升降驱动装置的控制量,并接下来同时控制水平驱动装置和升降驱动装置使传送出口移动到目标高度的同时保持传送出口沿垂直工作平面的直线运动。
[0032]
在传送式码垛机的另一种示意性实施方式中,升降驱动装置为电缸,其一端绕一个平行于第二轴线的第三轴线可转动地连接于机械臂,另一端绕一个平行于第二轴线的第四轴线可转动地连接于移动装置。结构参数包括第二轴线到工作平面的高度、第二轴线和第三轴线的公垂线的长度、第二轴线和第四轴线的公垂线的长度、传送出口到第一轴线和第二轴线的交点的线段的长度以及传送出口到工作平面的高度等于第二轴线到工作平面的高度时第二轴线和第三轴线的公垂线与第二轴线和第四轴线的公垂线的夹角值。
[0033]
在传送式码垛机的另一种示意性实施方式中,控制单元根据下列公式计算传送出口到目标高度时电缸的长度作为第一控制量:
[0034]
l=√{(l32 l42)-2*l3*l4*cos(∠a ∠a2);
[0035]
∠a2=arcsin[(h1-h0)/r];
[0036]
其中,l表示传送出口到目标高度时电缸的长度,l3表示第二轴线和第三轴线的公垂线的长度,l4表示第二轴线和第四轴线的公垂线的长度,∠a表示传送出口到工作平面的高度等于第二轴线到工作平面的高度时第二轴线和第三轴线的公垂线与第二轴线和第四轴线的公垂线的夹角值,∠a2表示传送出口到第一轴线和第二轴线的交点的线段与工作平面的夹角值,h1表示传送出口的目标高度,h0表示第二轴线到工作平面的高度,r表示传送出口到第一轴线和第二轴线的交点的线段的长度。
[0037]
在传送式码垛机的另一种示意性实施方式中,控制单元根据下列公式计算传送出口到目标高度时传送出口在水平方向的偏移量作为第二控制量:
[0038]
l1=cos∠b*r*(1-cos∠a2);
[0039]
∠b=arcsin[y/(r*cos∠a2)];
[0040]
∠a2=arcsin[(h1-h0)/r];
[0041]
其中,l1表示传送出口到目标高度时传送出口在水平方向的偏移量,∠b表示转动座相对于第二轴线垂直于水平方向时转动的夹角值,y表示传送出口在垂直于水平方向的方向上的调整距离,∠a2表示传送出口到第一轴线和第二轴线的交点的线段与工作平面的夹角值,h1表示传送出口的目标高度,h0表示第二轴线到工作平面的高度,r表示传送出口到第一轴线和第二轴线的交点的线段的长度。
[0042]
在传送式码垛机的另一种示意性实施方式中,控制单元被配置为能够在传送出口在垂直于水平方向的方向上的调整距离将要发生变化前获取传送出口在垂直于水平方向的方向上的目标调整距离,并根据传送出口在垂直于水平方向的方向上的目标调整距离和结构参数计算用于控制水平驱动装置的一个第三控制量,控制单元还被配置能够根据第三控制量控制水平驱动装置,使转动座转动到目标角度位置的同时保持传送出口沿平行于工作平面且垂直于水平方向的直线运动。
[0043]
在传送式码垛机的另一种示意性实施方式中,控制单元根据下列公式计算转动座转动到目标角度时传送出口在水平方向的偏移量作为第三控制量:
[0044]
l2=r*cos∠a2(1-cos∠b);
[0045]
∠b=arcsin[y/(r*cos∠a2)];
[0046]
∠a2=arcsin[(h1-h0)/r];
[0047]
其中,l2表示转动座转动到目标角度时传送出口在水平方向的偏移量,∠b表示转动座转动到目标角度时相对于第二轴线垂直于水平方向时转动的夹角值,y表示传送出口在垂直于水平方向的方向上的调整距离,∠a2表示传送出口到第一轴线和第二轴线的交点的线段与工作平面的夹角值,h1表示传送出口到工作平面的高度,h0表示第二轴线到工作平面的高度,r表示传送出口到第一轴线和第二轴线的交点的线段的长度。
附图说明
[0048]
以下附图仅对本发明做示意性说明和解释,并不限定本发明的范围。
[0049]
图1为传送式码垛机的控制方法的一种示意性实施方式的流程示意图。
[0050]
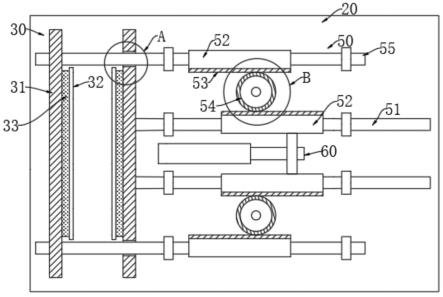
图2为传送式码垛机的控制方法的具体实施方式示意图。
[0051]
图3为传送式码垛机的控制方法的计算原理示意图。
[0052]
图4为传送式码垛机的控制方法的另一种示意性实施方式的流程示意图。
[0053]
图5为传送式码垛机的控制方法的另一具体实施方式示意图。
[0054]
图6为传送式码垛机的控制方法的另一计算原理示意图。
[0055]
标号说明
[0056]
10 移动装置
[0057]
20 转动座
[0058]
30 水平驱动装置
[0059]
40 机械臂
[0060]
50 升降驱动装置
[0061]
60 传送装置
[0062]
62 传送出口
[0063]
70 控制单元
[0064]
x
ꢀꢀ
水平方向
[0065]
s1 第一轴线
[0066]
s2 第二轴线
[0067]
s3 第三轴线
[0068]
s4 第四轴线
[0069]
l
ꢀꢀ
传送出口到目标高度时电缸的长度
[0070]
l1 传送出口到目标高度时传送出口在水平方向的偏移量
[0071]
l2 转动座转动到目标角度时传送出口在水平方向的偏移量
[0072]
l3 第二轴线和第三轴线的公垂线的长度
[0073]
l4 第二轴线和第四轴线的公垂线的长度
[0074]rꢀꢀ
传送出口到第一轴线和第二轴线的交点的线段的长度
[0075]yꢀꢀ
传送出口在垂直于水平方向的方向上的调整距离
具体实施方式
[0076]
为了对发明的技术特征、目的和效果有更加清楚的理解,现对照附图说明本发明的具体实施方式,在各图中相同的标号表示结构相同或结构相似但功能相同的部件。
[0077]
在本文中,“示意性”表示“充当实例、例子或说明”,不应将在本文中被描述为“示意性”的任何图示、实施方式解释为一种更优选的或更具优点的技术方案。
[0078]
图1为传送式码垛机的控制方法的一种示意性实施方式的流程示意图。图2为传送式码垛机的控制方法的具体实施方式示意图。参照图1和图2,传送式码垛机包括一个移动装置10、一个转动座20、一个水平驱动装置30、一个机械臂40、一个升降驱动装置50和一个传送装置60。移动装置10能够在水平驱动装置30驱动下在一个工作平面上沿一个水平方向移动。转动座20绕一个垂直于工作平面的第一轴线s1可转动地设置于移动装置10。机械臂40能够在升降驱动装置50驱动下绕一个平行于工作平面且与第一轴线s1相交的第二轴线s2相对于移动装置10转动。传送装置60设置于机械臂40,并且具有一个沿垂直于第二轴线s2的输送方向伸出的传送出口62。在示意性实施方式中,水平驱动装置30为一个电动机,升降驱动装置50为一个电缸,其一端绕一个平行于第二轴线s2的第三轴线s3可转动地连接于机械臂40,另一端绕一个平行于第二轴线s2的第四轴线s4可转动地连接于移动装置10。
[0079]
参照图1,控制方法包括下列步骤:
[0080]
步骤s10:设置一个能够控制水平驱动装置30和升降驱动装置50的控制单元70。在示意性实施方式中,控制单元70为可编程逻辑控制器,其能够精确地控制电动机和电缸。可编程逻辑控制器还可以运行预先设置好的fb程序块以实现判断或计算等复杂逻辑。
[0081]
步骤s20:将能够表示传送式码垛机的实际结构的结构参数输入控制单元70。参照图2,在示意性实施方式中,结构参数包括第二轴线s2到工作平面的高度h0、第二轴线s2和第三轴线s3的公垂线的长度l3、第二轴线s2和第四轴线s4的公垂线的长度l4、传送出口62到第一轴线s1和第二轴线s2的交点的线段的长度r以及传送出口62到工作平面的高度h1等
于第二轴线s2到工作平面的高度h0时第二轴线s2和第三轴线s3的公垂线与第二轴线s2和第四轴线s4的公垂线的夹角值。
[0082]
步骤s30:利用控制单元70获取传送出口62到工作平面的目标高度h1和传送出口62在垂直于水平方向x的方向上的调整距离y。并结合结构参数计算用于控制升降驱动装置50的一个第一控制量和用于控制水平驱动装置30的一个第二控制量。
[0083]
在示意性实施方式中,参照图2和图3,控制单元70根据下列公式计算传送出口62到目标高度时电缸的长度作为第一控制量:
[0084]
l=√{(l32 l42)-2*l3*l4*cos(∠a ∠a2);
[0085]
∠a2=arcsin[(h1-h0)/r];
[0086]
其中,l表示传送出口62到目标高度时电缸的长度,l3表示第二轴线s2和第三轴线s3的公垂线的长度,l4表示第二轴线s2和第四轴线s4的公垂线的长度,∠a表示传送出口62到工作平面的高度h1等于第二轴线s2到工作平面的高度h0时第二轴线s2和第三轴线s3的公垂线与第二轴线s2和第四轴线s4的公垂线的夹角值,h1表示传送出口62的目标高度,h0表示第二轴线s2到工作平面的高度,r表示传送出口62到第一轴线s1和第二轴线s2的交点的线段的长度。上述计算公式根据三角形余弦定理推导而出,由图5可知,∠a1=∠a2,并且在求得∠a2 ∠a后,将第二轴线s2到工作平面的高度h0作为参考值,将传送出口62的高度与第二轴线s2的高度差代入公式计算即可得到传送出口62到目标高度时电缸的长度。传送式码垛机在使用时,传送出口62会根据物料的高度逐渐升高从而将物料堆叠。控制单元70根据预先设定好的动作,在每次控制电缸时先计算下次电缸的长度,再依次控制电缸使传送出口62根据物料的高度逐渐升高。
[0087]
在示意性实施方式中,参照图2和图3,控制单元70根据下列公式计算传送出口62到目标高度时传送出口62在水平方向的偏移量作为第二控制量:
[0088]
l1=cos∠b*r*(1-cos∠a2);
[0089]
∠b=arcsin[y/(r*cos∠a2)];
[0090]
∠a2=arcsin[(h1-h0)/r];
[0091]
其中,l1表示传送出口62到目标高度时传送出口62在水平方向的偏移量,∠b表示转动座20相对于第二轴线s2垂直于水平方向x时转动的夹角值,y表示传送出口62在垂直于水平方向x的方向上的调整距离,∠a2表示传送出口62到第一轴线s1和第二轴线s2的交点的线段与工作平面的夹角值,h1表示传送出口62的目标高度,h0表示第二轴线s2到工作平面的高度,r表示传送出口62到第一轴线s1和第二轴线s2的交点的线段的长度。上述计算公式根据三角形余弦定理推导而出,由于在传送出口62的高度等于第二轴线s2的高度时,传送出口62在水平方向x上伸出的距离达到最大值,在传送出口62的高度大于或小于第二轴线s2的高度时,移动装置10都需向传送出口62移动以保证传送出口62在水平方向x上的位置相对固定。因此,在计算时以第二轴线s2到工作平面的高度h0作为参考值,将传送出口62的高度与第二轴线s2的高度差的绝对值代入公式计算。另外,参照图5,由于转动座20能够绕第一轴线s1转动,因此还需要考虑到传送出口62在垂直于水平方向x的方向上的调整距离y。由图6可知,∠b=∠b1,因此可以将转动座20相对于第二轴线s2垂直于水平方向x时转动的夹角值∠b作为中间变量代入公式进行计算传送出口62到目标高度时传送出口62在水平方向x的偏移量l1。
[0092]
步骤s40:利用控制单元70根据第一控制量和第二控制量同时控制升降驱动装置50和水平驱动装置30,使传送出口62移动到目标高度的同时保持传送出口62沿垂直工作平面的直线运动。
[0093]
本发明提供的传送式码垛机的控制方法,设置一个能够同时控制水平驱动装置30和升降驱动装置50的控制单元70,控制单元70能够结合传送式码垛机的实际结构,计算传送装置60的传送出口62到达目标高度时水平驱动装置30和升降驱动装置50的控制量,并接下来同时控制水平驱动装置30和升降驱动装置50使传送出口62移动到目标高度的同时保持传送出口62沿垂直工作平面的直线运动。
[0094]
图4为传送式码垛机的控制方法的另一种示意性实施方式的流程示意图。参照图4,其与图1中的控制方法相同或相似之处不再赘述,其区别在于,控制方法还包括步骤:
[0095]
步骤s50:在传送出口62在垂直于水平方向x的方向上的调整距离y将要发生变化前,利用控制单元70获取传送出口62在垂直于水平方向x的方向上的目标调整距离。
[0096]
步骤s60:根据传送出口62在垂直于水平方向x的方向上的目标调整距离和结构参数计算用于控制水平驱动装置30的一个第三控制量。
[0097]
在具体实施方式中,控制单元70根据下列公式计算转动座20转动到目标角度时传送出口62在水平方向的偏移量作为第三控制量:
[0098]
l2=r*cos[arcsin(|h1-h0|/r)]*(1-cos∠b);
[0099]
∠b=arcsin[y
x
/(r*cos∠a2)];
[0100]
∠a2=arcsin[(h1-h0)/r];
[0101]
其中,l2表示转动座20转动到目标角度时传送出口62在水平方向的偏移量,∠b表示转动座20转动到目标角度时相对于第二轴线s2垂直于水平方向x时转动的夹角值,y
x
表示传送出口62在垂直于水平方向x的方向上的目标调整距离,∠a2表示传送出口62到第一轴线s1和第二轴线s2的交点的线段与工作平面的夹角值,h1表示传送出口62到工作平面的高度,h0表示第二轴线s2到工作平面的高度,r表示传送出口62到第一轴线s1和第二轴线s2的交点的的线段的长度。上述计算公式根据三角形余弦定理推导而出,参照图5和图6,由于在第二轴线s2垂直于水平方向时传送出口62在水平方向x上伸出的距离达到最大值,在转动座20转动到其他角度位置时,移动装置10都需向传送出口62移动以保证传送出口62在水平方向上的位置相对固定。由图6可知,∠b=∠b1,因此可以将转动座20相对于第二轴线s2垂直于水平方向时转动的夹角值∠b作为中间变量代入公式进行计算转动座20转动到目标角度时传送出口62在水平方向x的偏移量l2。
[0102]
步骤s70:利用控制单元70根据第三控制量控制水平驱动装置30,使传送出口62在垂直于水平方向x的方向上的调整距离y达到目标调整距离的同时保持传送出口62沿平行于工作平面且垂直于水平方向x的直线运动。借此可以自动控制传送式码垛机将物料堆叠为沿垂直于水平方向整齐排列的数堆。
[0103]
参照图2,本发明还提供了一种传送式码垛机,包括一个移动装置10、一个转动座20、一个水平驱动装置30、一个机械臂40、一个升降驱动装置50、一个传送装置60以及一个控制单元70。
[0104]
移动装置10能够在一个工作平面上沿一个水平方向移动。转动座20绕一个垂直于工作平面的第一轴线s1可转动地设置于移动装置10。水平驱动装置30能够驱动移动装置10
沿水平方向移动。机械臂40绕一个平行于工作平面且与第一轴线s1相交的第二轴线s2可转动地设置于转动座20。升降驱动装置50能够驱动机械臂40绕第二轴线s2转动。传送装置60设置于机械臂40并且具有沿一个垂直于第二轴线s2的输送方向伸出的传送出口62。
[0105]
控制单元70被配置为能够输入表示传送式码垛机的实际结构的结构参数,控制单元70被配置为能够获取传送出口62到工作平面的目标高度h1和传送出口62在垂直于水平方向x的方向上的调整距离y,并结合结构参数计算用于控制升降驱动装置50的一个第一控制量和用于控制水平驱动装置30的一个第二控制量,控制单元70还被配置为根据第一控制量和第二控制量同时控制升降驱动装置50和水平驱动装置30,使传送出口62移动到目标高度的同时保持传送出口62沿垂直工作平面的直线运动。在示意性实施方式中,控制单元为可编程逻辑控制器,上述功能通过scl编程语言编写并封装成标准的fb程序块,并可以在编程逻辑控制器的ob循环程序块中进行调用。
[0106]
本发明提供的传送式码垛机,具有一个能够同时控制水平驱动装置和升降驱动装置的控制单元,控制单元能够结合传送式码垛机的实际结构,计算传送装置的传送出口到达目标高度时水平驱动装置和升降驱动装置的控制量,并同时水平驱动装置和升降驱动装置使传送出口移动到目标高度的同时保持传送出口沿垂直工作平面的直线运动。
[0107]
在示意性实施方式中,参照图2,升降驱动装置50为电缸,其一端绕一个平行于第二轴线s2的第三轴线s3可转动地连接于机械臂40,另一端绕一个平行于第二轴线s2的第四轴线s4可转动地连接于移动装置10。用于输入控制单元的结构参数包括第二轴线s2到工作平面的高度h0、第二轴线s2和第三轴线s3的公垂线的长度l3、第二轴线s2和第四轴线s4的公垂线的长度l4、传送出口62到第一轴线s1和第二轴线s2的交点的线段的长度r以及传送出口62到工作平面的高度h1等于第二轴线s2到工作平面的高度h0时第二轴线s2和第三轴线s3的公垂线与第二轴线s2和第四轴线s4的公垂线的夹角值。
[0108]
在示意性实施方式中,控制单元70根据下列公式计算传送出口62到目标高度时电缸的长度作为第一控制量:
[0109]
l=√{(l32 l42)-2*l3*l4*cos(∠a ∠a2);
[0110]
∠a2=arcsin[(h1-h0)/r];
[0111]
其中,l表示传送出口62到目标高度时电缸的长度,l3表示第二轴线s2和第三轴线s3的公垂线的长度l3,l4表示第二轴线s2和第四轴线s4的公垂线的长度l4,∠a表示传送出口62到工作平面的高度h1等于第二轴线s2到工作平面的高度h0时第二轴线s2和第三轴线s3的公垂线与第二轴线s2和第四轴线s4的公垂线的夹角值,∠a2表示传送出口62到第一轴线s1和第二轴线s2的交点的线段与工作平面的夹角值,h1表示传送出口62的目标高度,h0表示第二轴线s2到工作平面的高度,r表示传送出口62到第一轴线s1和第二轴线s2的交点的的线段的长度。
[0112]
在示意性实施方式中,控制单元70根据下列公式计算传送出口62到目标高度时传送出口62在水平方向的偏移量作为第二控制量:
[0113]
l1=cos∠b*r*(1-cos∠a2);
[0114]
∠b=arcsin[y/(r*cos∠a2)];
[0115]
∠a2=arcsin[(h1-h0)/r];
[0116]
其中,l1表示传送出口62到目标高度时传送出口62在水平方向x的偏移量,∠b表
示转动座20相对于第二轴线s2垂直于水平方向x时转动的夹角值,y表示传送出口62在垂直于水平方向x的方向上的调整距离,∠a2表示传送出口62到第一轴线s1和第二轴线s2的交点的线段与工作平面的夹角值,h1表示传送出口62的目标高度,h0表示第二轴线s2到工作平面的高度,r表示传送出口62到第一轴线s1和第二轴线s2的交点的的线段的长度。
[0117]
在示意性实施方式中,控制单元70被配置为能够在传送出口62在垂直于水平方向x的方向上的调整距离y将要发生变化前获取传送出口62在垂直于水平方向x的方向上的目标调整距离,并根据传送出口62在垂直于水平方向x的方向上的目标调整距离和结构参数计算用于控制水平驱动装置30的一个第三控制量,控制单元70还被配置能够根据第三控制量控制水平驱动装置30,使传送出口62在垂直于水平方向x的方向上的调整距离达到目标调整距离的同时保持传送出口62沿平行于工作平面且垂直于水平方向的直线运动。借此可以自动控制传送式码垛机将物料堆叠为沿垂直于水平方向整齐排列的数堆。具体的,控制单元70根据下列公式计算转动座20转动到目标角度时传送出口62在水平方向的偏移量作为第三控制量:
[0118]
l2=r*cos∠a2(1-cos∠b);
[0119]
∠b=arcsin[y
x
/(r*cos∠a2)];
[0120]
∠a2=arcsin[(h1-h0)/r];
[0121]
其中,l2表示转动座20转动到目标角度时传送出口62在水平方向x的偏移量,∠b表示转动座20转动到目标角度时相对于第二轴线s2垂直于水平方向x时转动的夹角值,y
x
表示传送出口62在垂直于水平方向x的方向上的目标调整距离,∠a2表示传送出口62到第一轴线s1和第二轴线s2的交点的线段与工作平面的夹角值,h1表示传送出口62到工作平面的高度,h0表示第二轴线s2到工作平面的高度,r表示传送出口62到第一轴线s1和第二轴线s2的交点的线段的长度。
[0122]
应当理解,虽然本说明书是按照各个实施例描述的,但并非每个实施例仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
[0123]
上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施例的具体说明,它们并非用以限制本发明的保护范围,凡未脱离本发明技艺精神所作的等效实施方案或变更,如特征的组合、分割或重复,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。