技术特征:
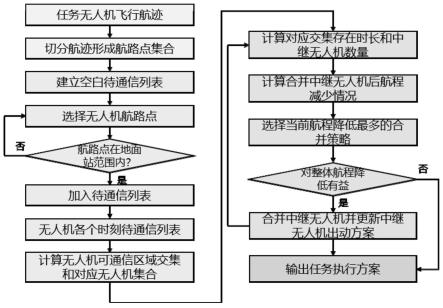
1.一种面向通信中继保障的异构多无人机协同航迹规划方法,其特征在于,根据中继无人机数量的限制进行任务无人机和中继无人机的协同航迹规划。2.根据权利要求1所述面向通信中继保障的异构多无人机协同航迹规划方法,其特征在于,当中继无人机的数量充足时,首先考虑任务无人机的任务分配及对应的航迹规划,然后计算中继无人机出动方案实现对整体任务的通信保障。3.根据权利要求2所述面向通信中继保障的异构多无人机协同航迹规划方法,其特征在于,所述当中继无人机的数量充足时,首先考虑任务无人机的任务分配及对应的航迹规划,然后计算中继无人机出动方案实现对整体任务的通信保障,具体为:在充足数量的中继无人机一对一保障前提下优化任务无人机的任务分配,形成基础任务执行方案,将此时的中继无人机总航程设为初始航程;在保证中继服务的前提下,分析不同任务无人机所属中继无人机的可行合并方案并计算所节约的航程;利用边际优化算法思想选择当前航程节约最多的合并方案并更新任务方案,即实现中继无人机一对多保障;重复以上合并过程直至无法降低中继无人机飞行航程,从而形成新任务执行方案,且新方案降低了中继无人机的总航程。4.根据权利要求3所述面向通信中继保障的异构多无人机协同航迹规划方法,其特征在于,当中继无人机的数量充足时,任务无人机和中继无人机的协同航迹规划具体包括如下步骤:步骤a1,根据任务要求,在保证中继无人机一对一保障的前提下优化任务无人机任务分配过程,计算对应任务时间表和任务无人机飞行航迹;步骤a2,根据预设时间步长和任务无人机时间表,将每架任务无人机的飞行航迹切分为多个连续航路点,生成每个时间步长下任务无人机的航路点集合;步骤a3,建立待通信列表,记录每个时间步长下任务无人机需要中继服务的航路点;步骤a4,针对待通信列表中每架任务无人机的航路点,计算其在时间步长的无人机的通信可达区域,判断同一时刻不同任务无人机的通信可达区域是否存在交集,若存在则记录对应任务无人机集合,形成交集列表,其中,允许同一时刻的任务无人机形成不同交集;步骤a5,计算交集列表中每个合并方案所节约的中继无人机航程:其包含合并无人机所带来的航程缩减,以及合并后任务后续中继无人机缺口所带来的中继无人机航程增加,两者差值作为合并方案所节约的中继无人机航程;步骤a6,根据交集列表每个合并方案所节约的中继无人机航程进行倒序排列,根据边际收益递减策略,选择当前航程节约最多的方案,将多架中继无人机的工作合并至一架中继无人机执行,并更新任务执行方案,重复步骤a4-步骤a6,直至合并中继无人机对中继无人机航程降低无益;步骤a7,输出最终任务执行方案。5.根据权利要求1所述面向通信中继保障的异构多无人机协同航迹规划方法,其特征在于,当中继无人机的数量受限时,在对任务无人机进行任务分配时考虑中继无人机的影响,在保证通信服务的基础上进行任务无人机的指派。6.根据权利要求5所述面向通信中继保障的异构多无人机协同航迹规划方法,其特征
在于,所述当中继无人机的数量受限时,在对任务无人机进行任务分配时考虑中继无人机的影响,在保证通信服务的基础上进行任务无人机的指派,具体为:根据遗传算法求解常用的多层编码策略,建立任务—任务无人机—中继无人机的映射编码;按照编码中任务顺序,协调每一任务对应的中继无人机与任务无人机飞行时间和飞行航迹,确保任务无人机处于中继无人机中继范围内,记录此时任务执行时间表和无人机飞行航迹,形成任务执行方案;利用遗传算法更新策略,在不改变中继无人机一对一保障任务无人机的前提下,优化任务执行方案,降低任务总体任务执行时间,选择遗传算法优化求解获得的完成时间最短的方案,将其作为基础方案进行调整;在基础方案基础上,不改变中继无人机出动方案,在满足任务执行要求和通信保障需求的基础上,改变部分任务无人机与中继无人机的映射关系,通过中继无人机一对多保障降低总体任务执行时间。7.根据权利要求6所述面向通信中继保障的异构多无人机协同航迹规划方法,其特征在于,当中继无人机的数量受限时,任务无人机和中继无人机的协同航迹规划具体包括如下步骤:步骤b1,在场景建模基础上,根据遗传算法编码策略生成任务—任务无人机—中继无人机的编码方案,即确定全部任务对应任务无人机和中继无人机,一架中继无人机可逐一保障多架任务无人机;步骤b2,按照算法编码顺序逐一选择任务进行计算:由中继无人机一对一保障任务无人机,确保任务无人机在其通信范围内,根据任务执行需求、任务无人机和中继无人机的飞行时间计算任务时间表和无人机飞行航迹,获得任务时间表和对应任务无人机、中继无人机的飞行航迹,形成任务执行方案;步骤b3,采用遗传算法的更新策略,以任务执行时间为优化目标,更新编码方案并获得若干任务—任务无人机—中继无人机的映射编码,并按照b2步骤计算任务执行方案,选择总体任务完成时间最短的任务执行方案,将其作为基础方案进行调整;步骤b4,计算基础方案所属中继无人机的飞行时间和对应覆盖范围并将基础方案中的全部任务按照任务执行时间表倒序排序,形成待调整任务列表;步骤b5,对待调整任务列表中每个任务执行如下判断:增加一架新的中继无人机,将该任务所属中继无人机改为新的中继无人机,其余均不变,重新计算任务执行方案,判断计算生成的方案中该任务完成时间是否提前,若无法提前则从待调整任务列表中删除该任务;步骤b6,对待调整任务列表中每个任务执行如下判断:根据b4步骤计算的中继无人机情况,在任务可执行时间区间内,其任务无人机是否可以由其它中继无人机提供中继服务,若不满足则删除该任务;步骤b7,选择待调整任务列表中第一个任务,在不改变中继无人机出动方案的前提下,分配多架中继无人机为该改变任务所属任务无人机提供中继服务,并计算新的任务时间表,选择使得任务完成时间最早的中继无人机并更新基础方案;步骤b8,转至步骤b4,调整任务无人机与中继无人机的映射关系,直至任务无人机无法合并至另外的中继无人机;
步骤b9,输出最终调整完成的任务执行方案。
技术总结
本发明公开了一种面向通信中继保障的异构多无人机协同航迹规划方法,中继无人机数量充足时,影响任务执行效率的为任务无人机出动方案。因此在中继无人机一对一保障任务无人机前提下优化任务无人机的任务分配,形成基础任务执行方案,再优化中继无人机出动方案实现中继无人机一对多保障,从而降低中继无人机出动数量和飞行航程。中继无人机数量受限时,影响任务执行效率的为中继无人机出动方案。因此在任务分配计算时考虑中继无人机与任务无人机的协调,在中继无人机逐一为多个任务无人机提供一对一中继服务的基础上,优化整体任务执行方案,形成基础任务执行方案,再优化任务无人机出动方案实现中继无人机一对多保障,从而降低总体任务执行时间。低总体任务执行时间。低总体任务执行时间。
技术研发人员:贾高伟 王建峰 梁智韬 鲁亚飞 陈清阳 郭正 侯中喜
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:2022.04.08
技术公布日:2022/8/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。