一种基于fpga的四次s形加减速控制系统及控制方法
技术领域
1.本发明涉及电机算法控制技术领域,具体为一种基于fpga的四次s形加减速控制系统及控制方法。
背景技术:
2.随着数字信号的电子技术的高速发展,加减速控制成为大多数运动控制系统运动发展的基石,并且对其要求越来越高。好的加减速控制算法可保证数控系统运行平稳,减少冲击,并能优化系统运行轨迹和响应速度,提高加工效率和加工精度。在几种速度算法中,指数形加减速控制算法计算较为简单,系统加减速时间短,计算量小,平滑型好,因此广泛应用于数控系统。现场可编程门阵列(field programmable gate array,fpga)具有工作频率高、硬件设计软件化、集成化程度高等特点。丰富的逻辑和寄存器资源,方便制定复杂逻辑电路, 并且设计在过程中可以根据自己的实际需要进行灵活的更改和修正设计,其并行执行控制指令的方式可极大的满足大量高速的电子线路的设计需求。因此,利用fpga对电机运动控制的研究逐渐成为发展趋势。
3.随着人工智能、智能控制技术的不断发展,高分辨率的图像信号的实时处理难度越来越大,精度要求也越来越高,现有的控制方法无法满足需求,所以急需一种基于fpga的四次s形加减速控制系统及控制方法来解决上述问题。
技术实现要素:
4.本发明提供一种能减少加工时间,提高效率,且能降低加工中的柔性冲击,使得加减速过程中电机更平稳的基于fpga的四次s形加减速控制系统及控制方法,来解决上述现有技术中存在的问题。
5.为实现上述目的,本发明提供如下技术方案:一种基于fpga的四次s形加减速控制系统,包括fpga控制器、步进电机驱动器以及步进电机,所述fpga 控制器与步进电机驱动器相连,所述步进电机驱动器通过其内部的双dmos管组成的h桥,将12v加载到步进电机上实现驱动控制。
6.优选的,所述步进电机驱动器采用a3977驱动芯片,fpga控制器与a3977 驱动芯片之间通过数字io进行步进电机驱动控制。
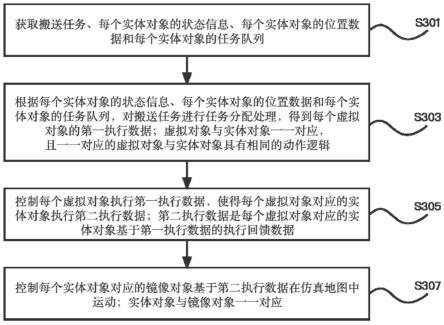
7.一种基于fpga的四次s形加减速控制系统的控制方法,包括如下步骤:
8.s1、将步进电机的当前频率和目标频率对比,当不一致时,fpga控制器发出切换当前速度的指令;
9.s2、fpga控制器采用连续积分的方法,将运动过程分为11个阶段且呈现s 形,包括:对加加速度斜率进行积分,获得加加速度公式;对各个阶段的加加速度积分,获得加速度公式;对加速进行积分,获得速度的公式,以及对速度进行积分,获得位移的公式;
10.s3、根据连续积分的方法的结果,控制步进电机进行四次加速度变换的五段加速过程,或进行四次加速度变换的五段减速过程,至当前频率和目标频率相同,实现步进电机
的加减速运动控制。
11.优选的,在fpga控制器中,用1s时间除以“频率”值,将“频率”换算为“周期”,其中,在quartusⅱ软件中添加除法器ip核,用于频率切换为周期计数值。
12.优选的,在步骤s2中,连续积分具体为:
13.加加速度变化率为:
14.对加加速度斜率进行积分,获得加加速度公式:其中,t
x
表示各个节点持续运行的时间,x=1,2,3,
…
11,τ
x
是局部时间坐标,表示每段相邻节点之间的时间差,τ
x
=t
x-t
x-1
,x=1,2,3,
…
11;
15.对各个阶段的加加速度积分,获得加速度公式:
16.17.对加速进行积分,获得速度的公式:
[0018][0019]
优选的,其中,加速段中的加加速段与减加速段的时间相同,即 t1 t2=t4 t5,t7 t8=t
10
t
11
。
[0020]
优选的,在相交线段衔接处夹角处,根据夹角的大小和前后两段的名义速度来限定衔接处的速度,即由向心加速度公式可求出相交线段过渡圆弧的转接速度,由圆弧速度来近似代替两段直线间的转接过渡速度,然后取该点的速度。
[0021]
优选的,在步骤s3中,四次加速度变换的五段加速过程,或进行四次加速度变换的五段减速过程为:首先进行加速度匀速变大,加加速度不变的加速运动,接着加速度变大,加加速度线性减小的加速运动,接着做加速度、加加速度均不变的加速运动,然后加速度和加加速度均减小的加速运动,最后通过加加速度不变、加速度变小的加速运动到达此次实验的步进电机的最大速度,接着匀速运动,其中,减速阶段与加速阶段完全相反。
[0022]
与现有技术相比,本发明的有益效果:本发明采用积分的方法实现s形电机的加减速控制,实现了步进电机按着规划的速度进行速度变化,并通过连续积分的方式,使加加速度平稳过渡且无冲击,使得加减速时间适中,启停效率高,减小了柔性冲击,并基于fpga控制器完成了按照逻辑语言实现速度控制功能,实现了有效减少加工时间,提高电机工作效率,延长电机的寿命和提升加工零件的质量。
附图说明
[0023]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
[0024]
在附图中:
[0025]
图1是本发明加减速控制系统的结构示意图;
[0026]
图2是本发明加减速控制系统实施的框图;
[0027]
图3是本发明加减速控制系统的matlab仿真图;
[0028]
图4是本发明modelsim仿真软件进行模拟信号及数字信号波形的功能仿真图;
[0029]
图5是本发明仿真结果示意图。
具体实施方式
[0030]
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
[0031]
实施例:如图1所示,一种基于fpga的四次s形加减速控制系统,包括fpga 控制器、步进电机驱动器以及步进电机,其中,步进电机驱动器采用a3977驱动芯片,fpga控制器与a3977驱动芯片之间通过数字io进行步进电机驱动控制,步进电机驱动器通过其内部的双dmos管组成的h桥,将12v加载到步进电机上实现驱动控制。
[0032]
参考图2所示,系统采用的是sf-cy4开发板进行编码实验仿真,步进电机驱动器是a3977型号;电压为12v,步进电机的型号是42bygh34-04a;quartus
ꢀⅱ
13.1是软件开放平台,并用modelsim仿真软件进行模拟信号及数字信号波形的功能仿真,使用硬件描述语言verilog hdl;通过usb接口来给fpga开发板通电,通过uart转usb进行与fpga的通信,将uart协议转化成usb协议,在 quartus软件上编写verilog语言,通过下载器连接jtag下载插座让程序烧录到开发板上,产生电脉冲信号,建立开发板和计算机的虚拟通信;
[0033]
驱动器用于将fpga产生的电脉冲信号转换成步进电机所需要的角位移信号,本实施例中采用的是a3977驱动器与42bygh34型号的步进电机,并通过io 口进行连接。step为产生步进电机位移的脉动信号,检测到该信号的一个上升沿或下降沿(本实施例使用上升沿)时,步进电机产生一个位移,该位移的大小由ms[1:0]决定,例如ms[1:0]=2'b00时,每4个step产生一个home脉冲。 home是回响脉冲,不同的step,home周期数不一样。通过sw拨码开关控制步进电机的开始与结束。
[0034]
基于上述fpga的四次s形加减速控制系统对步进电机进行控制:
[0035]
s1、首先判断步进电机的当前频率和目标频率是否一致,若一致,不需要进行任何加减速的操作指令;若当前频率小于目标频率,则进行加速操作;反之,进行减速操作,fpga控制器发出切换当前速度的指令;
[0036]
其中,在加减速控制运动过程当中,分频计数逻辑每10ms产生一个高脉冲,用来切换当前速度;
[0037]
s2、fpga控制器采用连续积分的方法,将运动过程分为11个阶段且呈现s 形,包括:对加加速度斜率进行积分,获得加加速度公式;对各个阶段的加加速度积分,获得加速度公式;对加速进行积分,获得速度的公式,以及对速度进行积分,获得位移的公式,将积分形式用fpga逻辑verilog语言写进开发板中;
[0038]
加加速度变化率为:
[0039]
对加加速度斜率进行积分,获得加加速度公式:其中,t
x
表示各个节点持续运行的时间,x=1,2,3,
…
11,τ
x
是局部时间坐标,表示每段相邻节点之间的时间差,τ
x
=t
x-t
x-1
,x=1,2,3,
…
11;
[0040]
对各个阶段的加加速度积分,获得加速度公式:
[0041][0042]
对加速进行积分,获得速度的公式:
[0043][0044]
其中,在fpga控制器中,用1s时间除以“频率”值,将“频率”换算为“周期”,其中,在quartusⅱ软件中添加除法器ip核,用于频率切换为周期计数值,由于“周期”必须换算为“时钟脉冲个数”为单位,除法运算中的“除数”也换算为“时钟脉冲个数”为单位;
[0045]
为了优化算法,本实施例中加速段中的加加速段与减加速段的时间相同,即t1 t2=t4 t5,t7 t8=t
10
t
11
;
[0046]
其中,在相交线段衔接处夹角处,根据夹角的大小和前后两段的名义速度来限定衔接处的速度,即由向心加速度公式可求出该段,即相交线段的过渡圆弧的转接速度,由圆弧速度来近似代替两段直线间的转接过渡速度,然后取该点的速度;
[0047]
s3、根据连续积分的方法的结果,控制步进电机进行四次加速度变换的五段加速过程,或进行四次加速度变换的五段减速过程,具体为:首先进行加速度匀速变大,加加速度不变的加速运动,接着加速度变大,加加速度线性减小的加速运动,接着做加速度、加加速度均不变的加速运动,然后加速度和加加速度均减小的加速运动,最后通过加加速度不变、加速度变小的加速运动到达此次实验的步进电机的最大速度。接着匀速运动;减速阶段与加速阶段完全相反,至当前频率和目标频率相同,实现步进电机的加减速运动控制。
[0048]
编写testbench仿真测试.v文件,在将代码下载到开发板上之前,编写一个仿真测试.v文件,通过修改时钟、起始终止时间为了验证过程中逻辑是否正确,并将.v文件保存到simulation文件夹下,对程序进行编译、运行,使电机运动,通过用modelsim仿真软件进行模拟信号及数字信号波形的功能仿真,观察波形并进行对比,其中,参考图3所示,为加减速控制系统的matlab仿真图,用于验证用fpga实现结果,位移、速度、加速度、加加速度和加加速度斜率曲线如图4所示,图5为本发明的仿真结果示意图,说明本发明完成。
[0049]
最后应说明的是:以上所述仅为本发明的优选实例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以
对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。