1.本发明属于植物研究技术领域,尤其涉及一种植物表型获取方法。
背景技术:
2.植物表型研究是植物研究领域的一个重要研究方向,主要通过对活体植物的外部性状表型(例如植物的叶片形状、生物量等)、生理表型(例如植物叶片温度、水分含量、色素分布或胁迫响应等)和内部结构表型(例如植物的穗部、茎秆和根部的内部结构)进行鉴别和分析,以及不同的环境条件对植物生长状况、产量、质量等的影响。其中,上述三种表型均通过成像技术获得图像,再利用模型从图像中获取相应表型信息。
3.在遗传育种、植物生物学等方面的研究的不断发展,对植物的同一时间、同一位置的外部性状表型、生理表型及内部结构表型,即植物的形态学参数、生理生化参数以及内部结构进行获取,以求全面准确地对植物的表型进行分析的需求越来越强烈。
4.然而,目前对植物的分析方式有如下两种:
5.1、取下植物的部分结构进行有损采集,然后依次放在不同的成像仪器下进行观察,无法对同一个体进行生长过程中时间连续的采集分析。
6.2、将植物整体依次搬运到多个具有不同功能的现有成像装置内进行,分别对能够获得植物不同表型的图像进行采集。但由于柔性植物在传输或手动搬运过程中会产生晃动或偏移,需要等待其静止后再采集,并且往往当前静止均相对前一次静止时的体态发生了变换,并且有时还需要进行人工对准,因此无法准确对植物的表型进行获取且获取时间长。
7.由此可看出,目前对植物表型图像的获取方法并不能满足对植物的同一时间、同一位置的内部结构表型、外部性状表型、生理表型的获取。
技术实现要素:
8.(一)要解决的技术问题
9.为了解决现有技术的上述问题,本发明提供一种植物表型获取方法,能够对植物的内部结构表型图像和外部性状表型图像,或者内部结构表型图像和生理表型图像,或者内部表型图像、生理表型图像以及外部性状表型图像进行同时同位的获取。
10.(二)技术方案
11.为了达到上述目的,本发明采用的主要技术方案包括:
12.本发明提供一种植物表型获取方法,植物静止放置,通过围绕植物水平旋转内部结构表型成像装置以及外部性状表型成像装置和生理表型成像装置这二者中的一个或两个,来获取植物的内部结构表型图像以及外部性状表型图像和生理表型图像这二者中的一个或两个。
13.优选地,围绕植物,同时水平旋转内部结构表型成像装置、外部性状表型成像装置和生理表型成像装置,在旋转过程中三者位置相对固定,先后或同时来进行内部结构表型图像、外部性状表型图像、生理表型图像的获取;内部结构表型成像装置、外部性状表型成
像装置和生理表型成像装置的图像采集高度相同。
14.优选地,内部结构表型成像装置为ct装置,在旋转过程中获取图像,所获取的图像覆盖植物的一周,将所获取的图像重建成整体图像;外部性状表型成像装置和生理表型成像装置在周向上的多个预设角度获取图像,在多个预设角度所获取的图像均覆盖植物的一周,将多个预设角度获取的外部性状表型图像和生理表型图像分别重建成整体图像。
15.优选地,外部性状表型成像装置为可见光成像仪;生理表型成像装置为如下成像仪的一种或多种:高光谱成像仪、荧光成像仪和红外成像仪。
16.优选地,同步竖向移动内部结构表型成像装置、外部性状表型成像装置和生理表型成像装置,在多个预设高度重复内部结构表型图像、外部性状表型图像和生理表型成像装置的旋转和获取图像的动作;多个预设高度的采集图像范围能够覆盖植物的整体高度的范围。
17.优选地,将多个预设高度以及在每个预设高度旋转一周所获取的内部结构表型图像重建成整体图像;将多个预设高度、多个预设角度获取的外部性状表型图像和生理表型图像分别重建成整体图像。
18.优选地,内部结构表型图像、外部性状表型图像和生理表型图像的获取过程中,对其匹配位置信息。
19.优选地,选取相同位置信息所对应的内部结构表型图像、外部性状表型图像和生理表型图像配对。
20.优选地,将内部结构表型成像装置、外部性状表型成像装置和生理表型成像装置固定在同一水平旋转环上,水平旋转环可转动且可竖向移动的连接在支座上,水平旋转环能够水平旋转并能够在多个预设角度停止,并且水平旋转环能够竖向移动并停止在任意高度;外部性状表型成像装置和生理表型成像装置彼此之间的间隔角度设置为:在水平旋转环旋转一周时,外部性状表型成像装置和生理表型成像装置依次在多个预设角度停止。
21.优选地,多个预设角度中每相邻两个预设角度的差值均相等;内部结构表型成像装置、外部性状表型成像装置和生理表型成像装置之间的间隔角度等于每相邻两个预设角度的差值或者为每相邻两个预设角度的差值的倍数。
22.(三)有益效果
23.本发明的有益效果是:
24.本发明提供的一种植物表型获取方法,将活体植物静止放置,通过围绕植物移动内部结构表型成像装置以及外部性状表型成像装置和生理表型成像装置这两个中的一个或两个,来获取植物的内部结构表型图像以及外部性状表型图像和生理表型图像这两个中的一个或多个,如此,不用移动(即同一位置)植物就能够实现植物的内部结构表型图像以及外部性状表型图像和生理表型图像这二者中的一个或两个的同一时间的原位采集,由此,从图像中继续获取的表型信息也是同时同位的,从而提高了植物表型获取的准确性,也提高了利用表型做研究的结果的准确性。
附图说明
25.图1为实施例1的植物表型获取方法的示意图,为俯视方向;图2为实施例3的植物表型获取方法的示意图,为俯视方向;图3为实施例5的植物表型获取方法的示意图,为俯视
方向;图4为实施例1-6可采用的一种机械结构的主视示意图;图5为图4中的机械结构的俯视示意图;图6为图4中a部分的放大图。
26.【附图标记说明】
27.101:内部结构表型成像装置;101a:x射线发射器;101b:x射线接收器;102:外部性状表型成像装置;103:生理表型成像装置;103’:荧光成像仪;103”:红外成像仪;103
”’
:高光谱成像仪;201:水平旋转环;202:外环体;203:内环体;204:滚动体;205:上密封带;206:下密封带;207:升降横梁;208:回转电机;209:载物架;210:立式支架;211:丝杠;212:导程连接件;213:升降电机;214:第一升降连接件;215:导轨槽;216:辅助导轨;217:固定座;218:副支架;219:直线导轨;220:第二升降连接件;221:拖链;222:支承台;223:底座。301:植物。
具体实施方式
28.为了更好的解释本发明,以便于理解,下面结合附图,通过具体实施方式,对本发明作详细描述。
29.实施例一
30.本实施例提供一种针对矮小的活体植物3执行的植物表型获取方法,具体为,植物301静止放置,如图1,通过围绕植物301水平旋转内部结构表型成像装置101和外部性状表型成像装置102,来获取植物301的内部结构表型图像和外部性状表型图像,进而通过现有模型从内部结构表型图像中获取内部结构表型,通过现有模型从外部性状表型图像中获取外部性状表型。
31.如此,不用移动植物301(即同一位置)就能够实现活体的植物301的内部结构表型图像和外部性状表型图像的同一时间的原位采集,由此,从图像中继续获取的表型信息也是同时同位的,从而提高了植物301表型获取的准确性,也提高了利用表型做研究的结果的准确性。其中,上述“同一时间”和“同时”并非是限定内部结构表型成像装置101和外部性状表型成像装置102必须同时启动来采集图像,而是相对于现有技术需要移动植物301进行依次图像采集的情况,本方法使植物301固定不动就能完成内部结构表型图像和外部性状表型图像的采集,各成像同时进行或者先后进行,时间都有较大的缩短,故形容为“同一时间”和“同时”。采集时间的缩短使得因植物301自身生长而得到的图像数据误差进一步减小甚至忽略不计,以此图像数据进行研究的结果更加准确。此外,相比于现有技术能够做到无损检测,能够随着植物301的生长阶段性采集同一株植物301的图像数据,对植物301的研究具有重要的意义。并且,植物301在固定放置不动的情况下就可以完成采集,减少植物301的体态变化对采集的图像数据的影响,以此图像数据进行研究的结果更加准确。基于上述,将内部结构表型和外部性状表型“同时”获取的设计理念,在植物研究领域是突破性的。
32.在本实施例中,内部结构表型成像装置101为ct装置,外部性状表型成像装置102为可见光成像仪,内部结构表型成像装置101和外部性状表型成像装置102的图像采集高度相同。同时内部结构表型成像装置101和外部性状表型成像装置102在旋转过程中是位置相对固定的,即二者同时转动且相对距离不变。此外,ct装置采集的图像,除可以获得内部结构表型以外,还可以用于获取角度、分蘖数等性状表型。
33.由于针对的活体植物301矮小,所以内部结构表型成像装置101和外部性状表型成
像装置102布置在植物301的大致高度中心位置进行图像采集,即可拍全植物301在此方位的高度方向上的整体图像。由此,仅需内部结构表型成像装置101旋转一周并在旋转过程中获取多个图像,并且所获取的多个图像覆盖植物的一周即可;同时,外部性状表型成像装置102旋转一周并在周向上的多个预设角度获取图像,多个预设角度中每相邻两个预设角度的差值是相等的,并且在多个预设角度所获取的图像均覆盖植物301的一周即可。然后将内部结构表型成像装置101旋转一周所获取的图像重建成整体图像;将外部性状表型成像装置102在多个预设角度获取的外部性状表型图像重建成整体外部性状表型图像。如此,便于对植物的整体观察以及研究。
34.进一步,在内部结构表型图像和外部性状表型图像的获取过程中,对其匹配位置信息,该位置信息由采集高度信息和采集角度信息组成,例如,采集高度信息为15mm,采集角度信息为90
°
。如此,在后续研究中,可选取相同位置信息对应的内部结构表型图像和外部性状表型图像进行配对,便于对植物各表型之间的关系的研究,也便于对植物的整体了解。同时,在上述内部结构表型图像和外部性状表型图像的采集高度相同、移动时相对固定,使得其图像所分配的位置信息容易对应,降低了配对难度。
35.进一步,内部结构表型成像装置101和外部性状表型成像装置102可同时进行内部结构表型图像和外部性状表型图像的获取,也可先后进行,即可先进行内部结构表型图像的获取再进行外部性状表型图像的获取,并且也可先进行外部性状表型图像的获取再进行内部结构表型图像的获取。在本实施例中,ct装置一般而言是低速连续运动的,而可见光成像仪是停在预设角度进行图像采集,而停止仅需要很短时间便可成像。所以,ct装置和可见光成像仪的采集基本彼此不干扰,二者相结合可以是一起低速旋转,在预设角度暂停后继续旋转,所以可以同时进行图像获取,如此节约了获取时间。上述预设角度即为角度信息。
36.为了保证内部结构表型成像装置101和外部性状表型成像装置102在转动的过程中保持同步,进而有利于位置信息的准确以及匹配研究的准确,本实施例中将内部结构表型成像装置101和外部性状表型成像装置102固定在同一水平旋转环201上,该水平旋转环201可转动且可竖向移动的连接在支座上,支座立在试验台或者地面上。水平旋转环201能够水平旋转并停止在多个预设角度,来在多个预设角度进行图像采集,同时,水平旋转环201能够竖向竖向移动并停止在任意高度,如此可适用于停止到成像装置对准不同矮植物301的高度中心附近。
37.为了保证内部结构表型成像装置101和外部性状表型成像装置102都能准确的、全面的拍摄整体高度范围的图像,并且便于匹配,二者在水平旋转环201上的固定位置需保证二者的采集图像高度相同。
38.同时,内部结构表型成像装置101和外部性状表型成像装置102彼此之间的间隔角度设置为:该间隔角度等于上述每相邻两个预设角度的差值或者为每相邻两个预设角度的差值的倍数,并且外部性状表型成像装置102能够依次在多个预设角度停止。
39.本实施例中,作为内部结构表型成像装置101的ct装置包括x射线发射器101a和x射线接收器101b,二者必须呈180
°
布置。作为外部性状表型成像装置102的可见光成像仪布置在x射线发射器101a和x射线接收器101b之间90
°
的位置,如此,x射线发射器101a与可见光成像仪呈90
°
设置,x射线接收器101b与可见光成像仪呈90
°
。相匹配地,初始x射线发射器101a位于0
°
位置,水平旋转环201每旋转90
°
暂停,使得可见光成像仪在0
°
、90
°
、180
°
和270
°
进行采集(相邻预设角度的差值为90
°
)。当然,也可以多暂停几次,比如均在0
°
、45
°
、90
°
、135
°
、180
°
、225
°
和270
°
进行采集(相邻预设角度的差值为45
°
,此时间隔角度为相邻预设角度的差值的倍数)。
40.综上,举例对矮小的活体植物301执行植物表型获取方法的第一种具体步骤为:
41.s11、将植物301放置在水平旋转环201的中心下方的支承台222上。
42.s12、将水平旋转环201移动至内部结构表型成像装置101和外部性状表型成像装置102对准植物301的目标采集高度(一般是植物301的高度的中心附近)。
43.s13、启动内部结构表型成像装置101和外部性状表型成像装置102,内部结构表型成像装置101在0
°
位置采集内部结构表型图像并持续启动状态,外部性状表型成像装置102在90
°
位置采集外部性状表型图像并随后停止工作。
44.s14、水平旋转环201顺时针(或逆时针)转动90
°
并暂停,内部结构表型成像装置101也在90
°
位置采集内部结构表型图像并持续启动状态,启动外部性状表型成像装置102,外部性状表型成像装置102在180
°
位置采集外部性状表型图像并随后停止工作。
45.s15、水平旋转环201顺时针(或逆时针)转动90
°
并暂停,启动外部性状表型成像装置102,外部性状表型成像装置102在270
°
位置采集外部性状表型图像并随后停止工作。
46.s16、水平旋转环201顺时针(或逆时针)转动90
°
并暂停,启动外部性状表型成像装置102,外部性状表型成像装置102在0
°
位置采集外部性状表型图像并随后停止工作。
47.s17、水平旋转环201顺时针(或逆时针)转动90
°
并暂停,回到初始位置,内部结构表型成像装置101停止工作。
48.当然,也可以先后采用内部结构表型成像装置101和外部性状表型成像装置102进行成像,以下步骤s23和s24不分先后。
49.s21、将植物301放置在水平旋转环201的中心下方的支承台222上。
50.s22、将水平旋转环201移动至内部结构表型成像装置101和外部性状表型成像装置102对准植物301的目标采集高度(一般是植物301的高度的中心附近)。
51.s23、水平旋转环201旋转一周,内部结构表型成像装置101从0
°
位置转一圈至回到0
°
位置,同时启动内部结构表型成像装置101,采集一周的内部结构表型图像,然后停止工作。
52.s24、水平旋转环201旋转并在外部性状表型成像装置102依次到达90
°
、180
°
、270
°
和0
°
位置时暂停,外部性状表型成像装置102在暂停时启动获取图像,然后停止工作。
53.实施例二
54.针对较大的活体植物301执行的植物表型获取方法,为了将较大的活体植物301在高度上整体采集完整,在实施例一的基础上,沿活体植物301的高度方向分割出多个预设高度,多个预设高度的采集图像范围能够覆盖活体植物301的整体高度的范围,并且做如下补充:
55.在上述多个预设高度中的每个预设高度,执行实施例一中的s12-s17或者s23-s24。其中,不同预设高度采集的图像所匹配的位置信息中的高度信息与预设高度相同。由此,此方式为在采集完一周图像后,同步竖向移动内部结构表型成像装置101和外部性状表型成像装置102,在多个预设高度重复内部结构表型图像和外部性状表型成像装置102的旋转和获取图像的动作。可简称为“先周向采集再竖向采集”。
56.此外,还可以在每个预设高度执行一遍s23;同时,在执行s24的过程中,水平旋转环201旋转到外部性状表型成像装置102位于一个预设角度时,在保持该角度,水平旋转环竖向移动依次在多个预设高度获取图像。由此,此方式为在外部性状表型成像装置102位于每个预设角度时都执行同步竖向移动内部结构表型成像装置101和外部性状表型成像装置102,在多个预设高度重复外部性状表型成像装置102的获取动作。可简称为先竖向再周向采集外部性状表型图像。
57.综上,在多个预设高度均获取了一周所对应的内部结构表型图像,并且在多个预设高度和多个预设角度均获取了所对应的外部性状表型图像的情况下,将多个预设高度以及在每个预设高度旋转一周所获取的内部结构表型图像重建成整体图像,将多个预设高度和多个预设角度获取的外部性状表型图像重建成整体图像。
58.由此,本实施例还能够满足较高的活体植物301的表型获取。
59.实施例三
60.本实施例提供一种针对矮小的活体植物301执行的植物表型获取方法,与实施例一不同之处在于,本实施例将外部性状表型成像装置102替换为生理表型成像装置103。具体为,植物301静止放置,如图2,通过围绕植物301水平旋转内部结构表型成像装置101和生理表型成像装置103,来获取植物301的内部结构表型图像和生理表型图像,进而通过现有模型从内部结构表型图像中获取内部结构表型,通过现有模型从生理表型图像中获取外部性状表型。
61.如此,不用移动植物301(即同一位置)就能够实现活体的植物301的内部结构表型图像和生理表型图像的同一时间的原位采集,由此,从图像中继续获取的表型信息也是同时同位的,从而提高了植物301表型获取的准确性,也提高了利用表型做研究的结果的准确性。其中,上述“同一时间
””
和“同时”同样并非是限定内部结构表型成像装置101和外部性状表型成像装置102必须同时启动来采集图像,而是相对于现有技术需要移动植物301进行依次图像采集的情况,本方法使植物301固定不动就能完成内部结构表型图像和生理表型图像的采集,各成像同时进行或者先后进行,时间都有较大的缩短,故形容为“同一时间
””
和“同时”。采集时间的缩短使得因植物301自身生长而得到的图像数据误差进一步减小甚至忽略不计,以此图像数据进行研究的结果更加准确。此外,相比于现有技术能够做到无损检测,能够随着植物301的生长阶段性采集同一株植物301的图像数据,对植物301的研究具有重要的意义。并且,植物301在固定放置不动的情况下就可以完成采集,减少植物301的体态变化对采集的图像数据的影响,以此图像数据进行研究的结果更加准确。
62.基于上述,将内部结构表型和生理表型“同时”获取的设计理念,在植物研究领域是突破性的。
63.在本实施例中,内部结构表型成像装置101为ct装置,生理表型成像装置103为三个,分别是高光谱成像仪103
”’
、荧光成像仪103’和红外成像仪103”,优选地采用近红外成像仪和中红外成像仪,当然,在其他实施例中,高光谱成像仪103
”’
、荧光成像仪103’和红外成像仪103”也可设置为其中一个或两个。
64.在本实施例中,内部结构表型成像装置101和生理表型成像装置103的图像采集高度相同。同时内部结构表型成像装置101和生理表型成像装置103在旋转过程中是位置相对固定的,即二者同时转动且相对距离不变。
65.由于针对的活体植物301矮小,所以内部结构表型成像装置101和生理表型成像装置103布置在植物301的大致高度中心位置进行图像采集,即可拍全植物301在此方位的高度方向上的整体图像。由此,仅需内部结构表型成像装置101旋转一周并在旋转过程中获取多个图像,并且所获取的多个图像覆盖植物的一周即可;同时,生理表型成像装置103旋转一周并在周向上的多个预设角度获取图像,多个预设角度中每相邻两个预设角度的差值是相等的,并且在多个预设角度所获取的图像均覆盖植物301的一周即可。然后将内部结构表型成像装置101旋转一周所获取的图像重建成整体图像;将生理表型成像装置103在多个预设角度获取的生理表型图像重建成整体生理表型图像,在本实施例这种同时设置多种生理表型成像装置103的情况下,各个生理表型成像装置103采集的图像各自形成整体的外部性状表型图像。如此形成整体图像,便于整体观察。
66.进一步,在内部结构表型图像和生理表型图像的获取过程中,对其匹配位置信息,该位置信息由采集高度信息和采集角度信息组成,例如,采集高度信息为15mm,采集角度信息为90
°
。如此,在后续研究中,可选取相同位置信息对应的内部结构表型图像和生理表型图像进行配对,便于对植物各表型之间的关系的研究,也便于对植物的整体了解。同时,在上述内部结构表型图像和生理表型图像的采集高度相同、相对固定,使得其图像所分配的位置信息容易对应,降低了配对难度。上述预设角度即为角度信息。
67.进一步,内部结构表型成像装置101和生理表型成像装置103可同时进行内部结构表型图像和生理表型图像的获取,也可先后进行,即可先进行内部结构表型图像的获取再进行生理表型图像的获取,并且也可先进行生理表型图像的获取再进行内部结构表型图像的获取。在本实施例中,ct装置一般而言是低速连续运动的,而高光谱成像仪103
”’
、荧光成像仪103’和红外成像仪103”是停在预设角度进行图像采集,而停止仅需要很短时间便可成像。所以,ct装置、高光谱成像仪103
”’
、荧光成像仪103’和红外成像仪103”的采集基本彼此不干扰,二者相结合可以是一起低速旋转,在预设角度暂停后继续旋转,所以可以同时进行图像获取,如此节约了获取时间。
68.为了保证内部结构表型成像装置101和生理表型成像装置103在转动的过程中保持同步,进而有利于位置信息的准确以及匹配研究的准确,本实施例中将内部结构表型成像装置101和生理表型成像装置103固定在同一水平旋转环201上,水平旋转环201同实施例一,不再赘述。
69.为了保证内部结构表型成像装置101和生理表型成像装置103都能准确的、全面的拍摄整体高度范围的图像,并且便于匹配,二者在水平旋转环201上的固定位置需保证二者的采集图像高度相同。
70.同时,内部结构表型成像装置101和生理表型成像装置103彼此之间的间隔角度设置:该间隔角度等于上述每相邻两个预设角度的差值或者为每相邻两个预设角度的差值的倍数,并且生理表型成像装置103能够依次在多个预设角度停止。
71.本实施例中,作为内部结构表型成像装置101的ct装置包括x射线发射器101a和x射线接收器101b,二者必须呈180
°
布置。荧光成像仪103’与x射线发射器101a间隔角度60
°
,红外成像仪103”与荧光成像仪103’间隔角度60
°
并位于x射线发射器101a的相反侧,高光谱成像仪103
”’
与红外成像仪103”间隔角度120
°
并位于荧光成像仪103’的相反侧;相匹配地,初始x射线发射器101a位于0
°
位置,水平旋转环201每旋转60
°
暂停,使得荧光成像仪103’、
红外成像仪103”和高光谱成像仪103
”’
均在0
°
、60
°
、120
°
、180
°
、240
°
、300
°
进行采集(相邻预设角度的差值为60
°
)。当然,也可以多暂停几次,比如均在0
°
、30
°
、60
°
、90
°
、120
°
、150
°
、180
°
、210
°
、240
°
、270
°
、300
°
、330
°
进行采集(相邻预设角度的差值为30
°
)
72.综上,举例对矮小的活体植物301执行植物表型获取方法的第一种具体步骤为:
73.s11、将植物301放置在水平旋转环201的中心下方的支承台222上。
74.s12、将水平旋转环201移动至内部结构表型成像装置101和三个生理表型成像装置103都对准植物301的目标采集高度(一般是植物301的高度的中心附近)。
75.s13、启动内部结构表型成像装置101和三个生理表型成像装置103,内部结构表型成像装置101在0
°
位置采集内部结构表型图像并持续启动状态,荧光成像仪103’在60
°
位置采集外部性状表型图像并随后停止工作,红外成像仪103”在120
°
位置采集外部性状表型图像并随后停止工作,高光谱成像仪103
”’
在240
°
位置采集外部性状表型图像并随后停止工作。
76.s14、水平旋转环201顺时针(或逆时针)转动60
°
并暂停,内部结构表型成像装置101也在60
°
位置采集内部结构表型图像并持续启动状态,启动三个生理表型成像装置103,荧光成像仪103’在120
°
位置采集外部性状表型图像并随后停止工作,红外成像仪103”在180
°
位置采集外部性状表型图像并随后停止工作,高光谱成像仪103
”’
在300
°
位置采集外部性状表型图像并随后停止工作。
77.s15、水平旋转环201顺时针(或逆时针)转动60
°
并暂停,内部结构表型成像装置101也在120
°
位置采集内部结构表型图像并持续启动状态,启动三个生理表型成像装置103,荧光成像仪103’在180
°
位置采集外部性状表型图像并随后停止工作,红外成像仪103”在240
°
位置采集外部性状表型图像并随后停止工作,高光谱成像仪103
”’
在0
°
位置采集外部性状表型图像并随后停止工作。
78.s16、水平旋转环201顺时针(或逆时针)转动60
°
并暂停,内部结构表型成像装置101也在180
°
位置采集内部结构表型图像并持续启动状态,启动三个生理表型成像装置103,荧光成像仪103’在240
°
位置采集外部性状表型图像并随后停止工作,红外成像仪103”在300
°
位置采集外部性状表型图像并随后停止工作,高光谱成像仪103
”’
在60
°
位置采集外部性状表型图像并随后停止工作。
79.s17、水平旋转环201顺时针(或逆时针)转动60
°
并暂停,内部结构表型成像装置101也在240
°
位置采集内部结构表型图像并持续启动状态,启动三个生理表型成像装置103,荧光成像仪103’在300
°
位置采集外部性状表型图像并随后停止工作,红外成像仪103”在0
°
位置采集外部性状表型图像并随后停止工作,高光谱成像仪103
”’
在120
°
位置采集外部性状表型图像并随后停止工作。
80.s18、水平旋转环201顺时针(或逆时针)转动60
°
并暂停,内部结构表型成像装置101也在300
°
位置采集内部结构表型图像并持续启动状态,启动三个生理表型成像装置103,荧光成像仪103’在0
°
位置采集外部性状表型图像并随后停止工作,红外成像仪103”在60
°
位置采集外部性状表型图像并随后停止工作,高光谱成像仪103
”’
在180
°
位置采集外部性状表型图像并随后停止工作。
81.s19、水平旋转环201顺时针(或逆时针)转动60
°
并停止,回到初始位置。
82.当然,也可以先后采用内部结构表型成像装置101和生理表型成像装置103进行成
像,以下步骤s23和s24不分先后。
83.s21、将植物301放置在水平旋转环201的中心下方的支承台222上。
84.s22、将水平旋转环201移动至内部结构表型成像装置101和生理表型成像装置103对准植物301的目标采集高度(一般是植物301的高度的中心附近)。
85.s23、水平旋转环201旋转一周,内部结构表型成像装置101从0
°
位置转一圈至回到0
°
位置,同时启动内部结构表型成像装置101,采集一周的内部结构表型图像,然后停止工作。
86.s24、水平旋转环201旋转并在荧光成像仪103、红外成像仪103”、高光谱成像仪103
”’
到达90
°
、180
°
、270
°
和0
°
位置时暂停,荧光成像仪103、红外成像仪103”、高光谱成像仪103
”’
在暂停时启动获取图像,然后停止工作。当然,可以荧光成像仪103、红外成像仪103”、高光谱成像仪103
”’
在暂停时同时启动,也可以水平旋转环201每次转动一圈仅启动一种成像仪。
87.实施例四
88.针对较大的活体植物301执行的植物表型获取方法,为了将较大的活体植物301在高度上整体采集完整,在实施例一的基础上,沿活体植物301的高度方向分割成多个预设高度,多个预设高度的采集图像范围能够覆盖活体植物301的整体高度的范围,并且做如下补充:在上述多个预设高度中的每个预设高度,执行实施例三种的s12-s19。其中,不同预设高度采集的图像所匹配的位置信息中的高度信息与预设高度相同。
89.由此,此方式为在采集完一周图像后,同步竖向移动内部结构表型成像装置101和生理表型成像装置103,在多个预设高度重复内部结构表型图像和生理表型成像装置103的旋转和获取图像的动作。可简称为“先周向采集再竖向采集”。
90.此外,还可以在每个预设高度执行一遍s23;同时,在执行s24的过程中,水平旋转环201旋转到生理表型成像装置103位于一个预设角度时,在保持该角度,水平旋转环竖向移动依次在多个预设高度获取图像。由此,此方式为是在生理表型成像装置103位于每个预设角度时都执行同步竖向移动内部结构表型成像装置101和生理表型成像装置103,在多个预设高度重复生理表型成像装置103的获取动作。可简称为先竖向再周向采集生理表型图像。
91.综上,在多个预设高度均获取了一周所对应的内部结构表型图像,并且在多个预设高度和多个预设角度均获取了所对应的生理表型图像的情况下,将多个预设高度以及在每个预设高度旋转一周所获取的内部结构表型图像重建成整体图像,将多个预设高度和多个预设角度获取的生理表型图像重建成整体图像。
92.由此,本实施例还能够满足较高的活体植物301的表型获取。
93.实施例五
94.本实施例提供一种针对矮小的活体植物301执行的植物表型获取方法,该实施例中同时设置内部结构表型成像装置101、生理表型成像装置103和外部性状表型成像装置102。
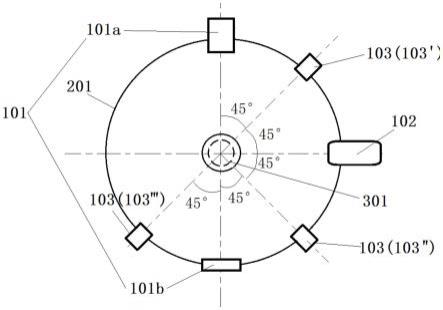
95.具体为,植物301静止放置,如图3,通过围绕植物301水平旋转内部结构表型成像装置101、外部性状表型成像装置102和生理表型成像装置103,来获取植物301的内部结构表型图像、外部性状表型图像和生理表型图像,进而通过现有模型从内部结构表型图像中
获取内部结构表型,通过现有模型从生理表型图像中获取生理表型,进而通过现有模型从外部性状表型图像中获取外部性状表型。
96.如此,不用移动植物301(即同一位置)就能够实现活体的植物301的内部结构表型图像、外部性状表型图像和生理表型图像的同一时间的原位采集,由此,从图像中继续获取的表型信息也是同时同位的,从而提高了植物301表型获取的准确性,也提高了利用表型做研究的结果的准确性。其中,上述“同一时间”和“同时”同样并非是限定内部结构表型成像装置101、外部性状表型成像装置102和生理表型成像装置103必须同时启动来采集图像,而是相对于现有技术需要移动植物301进行依次图像采集的情况,本方法使植物301固定不动就能完成内部结构表型图像和生理表型图像的采集,各成像同时进行或者先后进行,时间都有较大的缩短,故形容为“同一时间”和“同时”。采集时间的缩短使得因植物301自身生长而得到的图像数据误差进一步减小甚至忽略不计,以此图像数据进行研究的结果更加准确。此外,相比于现有技术能够做到无损检测,能够随着植物301的生长阶段性采集同一株植物301的图像数据,对植物301的研究具有重要的意义。并且,植物301在固定放置不动的情况下就可以完成采集,减少植物301的体态变化对采集的图像数据的影响,以此图像数据进行研究的结果更加准确。
97.基于上述,将内部结构表型、外部性状表型和生理表型“同时”获取的设计理念,在植物研究领域是突破性的。
98.在本实施例中,内部结构表型成像装置101为ct装置。外部性状表型成像装置102为可见光成像仪。生理表型成像装置103为三个,分别是高光谱成像仪103
”’
、荧光成像仪103’和红外成像仪103”,优选地采用近红外成像仪和中红外成像仪,当然,在其他实施例中,高光谱成像仪103
”’
、荧光成像仪103’和红外成像仪103”也可设置为其中一个或两个。并且,也可设置多个内部结构表型成像装置101和外部性状表型成像装置102。
99.在本实施例中,内部结构表型成像装置101、外部性状表型成像装置102和生理表型成像装置103的图像采集高度相同。同时内部结构表型成像装置101、外部性状表型成像装置102和生理表型成像装置103在旋转过程中是位置相对固定的,即三者同时转动且相对距离不变。
100.由于针对的活体植物301矮小,所以内部结构表型成像装置101、外部性状表型成像装置102和生理表型成像装置103布置在植物301的大致高度中心位置进行图像采集,即可拍全植物301在此方位的高度方向上的整体图像。由此,仅需内部结构表型成像装置101旋转一周并在旋转过程中获取多个图像,并且所获取的多个图像覆盖植物的一周即可;同时,外部性状表型成像装置102和生理表型成像装置103旋转一周并均在周向上的多个预设角度获取图像,多个预设角度中每相邻两个预设角度的差值是相等的,并且在多个预设角度所获取的图像均覆盖植物301的一周即可。然后内部结构表型成像装置101旋转一周所获取的图像重建成整体图像;将外部性状表型成像装置102在多个预设角度获取的形状表型图像重建成整体的形状表型图像,将生理表型成像装置103在多个预设角度获取的生理表型图像重建成整体的生理表型图像,在本实施例这种同时设置多种生理表型成像装置103的情况下,各个生理表型成像装置103采集的图像各自形成整体的生理表型图像。如此形成整体图像,便于对植物的整体观察以及研究。
101.进一步,在内部结构表型图像和生理表型图像的获取过程中,对其匹配位置信息,
该位置信息由采集高度信息和采集角度信息组成,例如,采集高度信息为15mm,采集角度信息为90
°
。如此,在后续研究中,可选择相同位置信息对应的内部结构表型图像、外部性状表型图像和生理表型图像进行配对,便于对植物各表型之间的关系的研究,也便于对植物的整体了解。同时,在上述内部结构表型图像、外部性状表型图像和生理表型图像的采集高度相同、移动时相对固定且生理表型成像装置和形状表型成像装置在相同的多个预设角度进行图像采集,使得其图像所分配的位置信息更加容易对应,降低了配对难度。上述预设角度即为角度信息。
102.进一步,内部结构表型成像装置101、外部性状表型成像装置102和生理表型成像装置103可同时进行内部结构表型图像、外部性状表型成像装置102和生理表型图像的获取,也可先后进行,先后进行的次序不做限定。在本实施例中,ct装置一般而言是低速连续运动的,而可见光成像仪、高光谱成像仪103
”’
、荧光成像仪103’和红外成像仪103”是停在预设角度进行图像采集,而停止仅需要很短时间便可成像。所以,ct装置、可见光成像仪、高光谱成像仪103
”’
、荧光成像仪103’和红外成像仪103”的采集基本彼此不干扰,所以可以同时进行图像获取,如此节约了获取时间。
103.为了保证内部结构表型成像装置101、外部性状表型成像装置102和生理表型成像装置103在转动的过程中保持同步,进而有利于位置信息的准确以及匹配研究的准确,本实施例中将内部结构表型成像装置101、外部性状表型成像装置102和生理表型成像装置103固定在同一水平旋转环201上,水平旋转环201同实施例一,不再赘述。
104.为了保证内部结构表型成像装置101、外部性状表型成像装置102和生理表型成像装置103都能准确的、全面的拍摄整体高度范围的图像,并且便于匹配,三者在水平旋转环201上的固定位置需保证三者的采集图像高度相同。
105.同时,内部结构表型成像装置101、外部性状表型成像装置102和生理表型成像装置103彼此之间的间隔角度设置为:该间隔角度等于上述每相邻两个预设角度的差值或者为每相邻两个预设角度的差值的倍数,并且在水平旋转环201旋转一周时,外部性状表型成像装置102和生理表型成像装置103能够依次在多个预设角度停止。
106.本实施例中,作为内部结构表型成像装置101的ct装置包括x射线发射器101a和x射线接收器101b,二者必须呈180
°
布置。可见光成像仪设置在与x射线发射器101a顺时针(或逆时针)90
°
的位置,荧光成像仪103’位于x射线发射器101a和可见光成像仪之间且与二者间隔角度45
°
,红外成像仪103”设置在可见光成像仪和x射线接收器101b之间且与二者间隔角度45
°
,高光谱成像仪103
”’
位于x射线接收器101b的顺时针(或逆时针)45
°
的位置;相匹配地,初始x射线发射器101a位于0
°
位置,水平旋转环201每旋转45
°
停止,使得可见光成像仪、荧光成像仪103’、红外成像仪103”和高光谱成像仪103
”’
均在0
°
、45
°
、90
°
、135
°
、180
°
、225
°
、270
°
、315
°
进行采集(相邻预设角度的差值为45
°
)。
107.综上,举例对矮小的活体植物301执行植物表型获取方法的第一种具体步骤为:
108.s11、将植物301放置在水平旋转环201的中心下方的支承台222上。
109.s12、将水平旋转环201移动至内部结构表型成像装置101、外部性状表型成像装置102和三个生理表型成像装置103都对准植物301的目标采集高度(一般是植物301的高度的中心附近)。
110.s13、启动内部结构表型成像装置101、外部性状表型成像装置102和三个生理表型
成像装置103,内部结构表型成像装置101在0
°
位置采集内部结构表型图像并持续启动状态,荧光成像仪103’在45
°
位置采集外部性状表型图像并随后停止工作,可见光成像仪在90
°
位置采集外部性状表型图像并随后停止工作,红外成像仪103”在135
°
位置采集外部性状表型图像并随后停止工作,高光谱成像仪103
”’
在225
°
位置采集外部性状表型图像并随后停止工作。
111.s14、水平旋转环201顺时针(或逆时针)转动45
°
并暂停,内部结构表型成像装置101也在45
°
位置采集内部结构表型图像并持续启动状态,启动外部性状表型成像装置102和三个生理表型成像装置103,荧光成像仪103’在90
°
位置采集外部性状表型图像并随后停止工作,可见光成像仪在135
°
位置采集外部性状表型图像并随后停止工作,红外成像仪103”在180
°
位置采集外部性状表型图像并随后停止工作,高光谱成像仪103
”’
在270
°
位置采集外部性状表型图像并随后停止工作。
112.s15、水平旋转环201顺时针(或逆时针)转动45
°
并暂停,内部结构表型成像装置101也在90
°
位置采集内部结构表型图像并持续启动状态,启动外部性状表型成像装置102和三个生理表型成像装置103,荧光成像仪103’在135
°
位置采集外部性状表型图像并随后停止工作,可见光成像仪在180
°
位置采集外部性状表型图像并随后停止工作,红外成像仪103”在225
°
位置采集外部性状表型图像并随后停止工作,高光谱成像仪103
”’
在315
°
位置采集外部性状表型图像并随后停止工作。
113.s16、水平旋转环201顺时针(或逆时针)转动45
°
并暂停,内部结构表型成像装置101也在135
°
位置采集内部结构表型图像并持续启动状态,启动外部性状表型成像装置102和三个生理表型成像装置103,荧光成像仪103’在180
°
位置采集外部性状表型图像并随后停止工作,可见光成像仪在225
°
位置采集外部性状表型图像并随后停止工作,红外成像仪103”在270
°
位置采集外部性状表型图像并随后停止工作,高光谱成像仪103
”’
在0
°
位置采集外部性状表型图像并随后停止工作。
114.s17、水平旋转环201顺时针(或逆时针)转动45
°
并暂停,内部结构表型成像装置101也在180
°
位置采集内部结构表型图像并持续启动状态,启动外部性状表型成像装置102和三个生理表型成像装置103,荧光成像仪103’在225
°
位置采集外部性状表型图像并随后停止工作,可见光成像仪在270
°
位置采集外部性状表型图像并随后停止工作,红外成像仪103”在315
°
位置采集外部性状表型图像并随后停止工作,高光谱成像仪103
”’
在45
°
位置采集外部性状表型图像并随后停止工作。
115.s18、水平旋转环201顺时针(或逆时针)转动45
°
并暂停,内部结构表型成像装置101也在225
°
位置采集内部结构表型图像并持续启动状态,启动外部性状表型成像装置102和三个生理表型成像装置103,荧光成像仪103’在270
°
位置采集外部性状表型图像并随后停止工作,可见光成像仪在315
°
位置采集外部性状表型图像并随后停止工作,红外成像仪103”在0
°
位置采集外部性状表型图像并随后停止工作,高光谱成像仪103
”’
在90
°
位置采集外部性状表型图像并随后停止工作。
116.s19、水平旋转环201顺时针(或逆时针)转动45
°
并暂停,内部结构表型成像装置101也在270
°
位置采集内部结构表型图像并持续启动状态,启动外部性状表型成像装置102和三个生理表型成像装置103,荧光成像仪103’在315
°
位置采集外部性状表型图像并随后停止工作,可见光成像仪在0
°
位置采集外部性状表型图像并随后停止工作,红外成像仪
103”在45
°
位置采集外部性状表型图像并随后停止工作,高光谱成像仪103
”’
在135
°
位置采集外部性状表型图像并随后停止工作。
117.s110、水平旋转环201顺时针(或逆时针)转动45
°
并暂停,内部结构表型成像装置101也在315
°
位置采集内部结构表型图像并持续启动状态,启动外部性状表型成像装置102和三个生理表型成像装置103,荧光成像仪103’在0
°
位置采集外部性状表型图像并随后停止工作,可见光成像仪在45
°
位置采集外部性状表型图像并随后停止工作,红外成像仪103”在90
°
位置采集外部性状表型图像并随后停止工作,高光谱成像仪103
”’
在180
°
位置采集外部性状表型图像并随后停止工作。
118.s111、水平旋转环201顺时针(或逆时针)转动45
°
并停止,回到初始位置。
119.当然,也可以先后采用内部结构表型成像装置101以及外部性状表型成像装置102和生理表型成像装置103进行成像,以下步骤s23和s24不分先后。
120.s21、将植物301放置在水平旋转环201的中心下方的支承台222上。
121.s22、将水平旋转环201移动至内部结构表型成像装置101、外部性状表型成像装置102和生理表型成像装置103对准植物301的目标采集高度(一般是植物301的高度的中心附近)。
122.s23、水平旋转环201旋转一周,内部结构表型成像装置101从0
°
位置转一圈至回到0
°
位置,同时启动内部结构表型成像装置101,采集一周的内部结构表型图像,然后停止工作。
123.s24、水平旋转环201旋转并在可见光成像仪、荧光成像仪103、红外成像仪103”、高光谱成像仪103
”’
到达45
°
、90
°
、135
°
、180
°
、225
°
、270
°
、315
°
、0
°
位置时暂停,可见光成像仪、荧光成像仪103、红外成像仪103”、高光谱成像仪103
”’
在暂停时启动获取图像,然后停止工作。当然,可以可见光成像仪、荧光成像仪103、红外成像仪103”、高光谱成像仪103
”’
在暂停时同时启动,也可以水平旋转环201每次转动一圈仅启动一种成像仪。
124.实施例六
125.针对较大的活体植物301执行的植物表型获取方法,为了将较大的活体植物301在高度上整体采集完整,在实施例三的基础上,沿活体植物301的高度方向分割成多个预设高度,多个预设高度的采集图像范围能够覆盖活体植物301的整体高度的范围,并且做如下补充:
126.在上述多个预设高度中的每个预设高度,执行实施例五中的s12-s111。其中,不同预设高度采集的图像所匹配的位置信息中的高度信息与预设高度相同。
127.由此,此方式为在采集完一周图像后,同步竖向移动内部结构表型成像装置101、外部性状表型成像装置102和生理表型成像装置103,在多个预设高度重复内部结构表型成像装置101、外部性状表型图像成像装置和生理表型成像装置103的旋转和获取图像的动作。可简称为“先周向采集再竖向采集”。
128.此外,还可以在每个预设高度执行一遍s23;同时,在执行s24的过程中,水平旋转环201旋转到生理表型成像装置103和形状表型成像装置102位于一个预设角度时,在保持该角度,水平旋转环竖向移动依次在多个预设高度获取图像。由此,此方式为是在生理表型成像装置103和形状表型成像装置102位于每个预设角度时都执行同步竖向移动内部结构表型成像装置101、外部性状表型成像装置102和生理表型成像装置103,在多个预设高度重
复外部性状表型成像装置102和生理表型成像装置103的获取动作。可简称为先竖向再周向采集生理表型图像。
129.综上,在多个预设高度均获取了一周所对应的内部结构表型图像,并且在多个预设高度和多个预设角度均获取了所对应的生理表型图像和外部性状表型图像的情况下,将多个预设高度以及在每个预设高度旋转一周所获取的内部结构表型图像重建成整体图像,将多个预设高度和多个预设角度获取的生理表型图像重建成整体图像,将多个预设高度和多个预设角度获取的外部性状表型图像重建成整体图像。
130.由此,本实施例还能够满足较高的活体植物301的表型获取。
131.综合上述实施例一至六,植物表型获取方法在保护罩中进行,既起到x射线防护作用,可避免外界因素对植物301的干扰,尤其是风的干扰。光源的设置有如下两种方式:第一种为设置一个总光源,该总光源固定在植物301的正上方,朝向植物301照射。此方式较为简单,便于操作,但可能导致植物301下部背光,成像效果较差,当然可以补充在保护罩的下部设置光源,朝向植物301、倾斜向上照射,来对植物301的下部进行补光。第二种为高光谱成像仪103
”’
、荧光成像仪103’、可见光成像仪和红外光成像仪”各自匹配有一个光源,该光源相对于所匹配的成像仪位置固定(同成像仪一起升降和转动),为各自当前的照射位置提供光。此方式有助于清晰地采集成像仪当前照射位置的图像,但结构和操作都相对复杂。光源可选择宽谱白光光源,例如可为宽谱led光源,其为高光谱成像仪103
”’
、荧光成像仪103’、可见光成像仪和红外光成像仪”提供激发光或作为照明光。在启动各成像仪之前启动光源。
132.此外,提供图4-6所示的机械结构来完成上述植物表型获取方法,但此机械结构仅为较优的选择,并不局限于仅可以用这一种机械结构来实现。除上述提及的水平旋转环201、支承台222、生理表型成像装置103、内部结构表型成像装置101和外部性状表型成像装置102以外,还设置有升降机构、回转电机208、载物架209和中控装置。其中,水平旋转环201包括外环体202、内环体203和多个滚动体204。外环体202套设在内环体203的外侧,多个滚动体204滚动限位在内环体203和外环体202之间,外环体202可做360度旋转。内环体203通过升降横梁207与升降机构连接,内环体203不转动,上述总光源设置在升降横梁207或其他结构上,使得光源与植物的距离可调。在外环体202的底端上周向等间距的开设有上述安装孔,根据上述实施例一至实施例六,为了适用于更多使用情况,相邻安装孔的间隔角度优选为15
°
,载物架209通过安装孔可拆卸地安装在外环体202上,并且伸出至水平旋转环201的下方,各成像装置固定在载物架209上,在各成像装置配有自己光源的时候,光源也设置在载物架209上。由此,成像装置均通过载物架209连接于外环体202,外环体202的转动带动载物架209转动,进而带动成像装置转动。回转电机208与外环体202连接,以驱动外环体202转动。当然,在其他实施方式中,回转电机208可与内环体203连接,成像装置通过载物架209连接在内环体203上,外环体202通过升降横梁207连接至升降机构。其中,水平旋转环201还包括上密封带205和下密封带206,上密封带205和下密封带206分别置于水平旋转环201的上端和下端,用于密封外环体202和内环体203之间的缝隙,以防止滚动体204容纳槽内的润滑油泄漏,保证了滚动体204的润滑。
133.升降机构包括主直线移动组件,主直线移动组件包括立式支架210、丝杠211、导程连接件212及升降电机213。丝杠211竖直定向,并通过固定座217可转动地固定在立式支架210上,导程连接件212套设在丝杠211上且导程连接件212与升降横梁207连接,升降电机
213与丝杠211连接,驱动丝杠211转动从而带动导程连接件212上的旋转机构随导程连接件212沿丝杠211在竖直方向上移动。该升降电机213与中控装置连接,中控装置控制升降电机213的开启和关闭。
134.主直线移动组件还包括第一升降连接件214和辅助导轨216,辅助导轨216安装在立式支架210上且辅助导轨216分别设置在丝杠211的两侧,导程连接件212通过第一升降连接件214与升降横梁207连接,在第一升降连接件214上还设有与辅助导轨216匹配的导轨槽215。第一升降件上的导轨槽215沿辅助导轨216移动,进一步保证了旋转机构在竖直方向上移动的稳定性。当然在实际应用的过程中,也可仅在立式支架210的左侧或右侧设置单侧辅助导轨216,只要能够保证旋转机构的平稳运行即可。具体地,升降机构还包括副直线移动组件,副直线移动组件包括副支架218、直线导轨219和第二升降连接件220,直线导轨219安装在副支架218上,第二升降连接件220能够在直线导轨219上滑动,直线导轨219通过第二升降连接件220与升降横梁207连接,立式支架210和副支架218相对地设置在水平旋转环201的两侧。通过设置副直线移动组件,使其配合主直线移动组件带动旋转机构在竖直方向上运动,保证了旋转机构在竖直方向上移动的稳定性。其中,还包括底座223,主支架和副支架218设置在底座223的两侧。在底座223的一侧可设置拖链221,用于放置电线。
135.综上,水平旋转环可转动地通过升降横梁与主直线移动组件和副直线移动组件连接,主直线移动组件和副直线移动组件用于对水平旋转环升降方向进行限位,主直线移动组件用于为水平旋转环的升降提供动力。
136.具体地,支承台222固定于二坐标滑台。其中,二坐标滑台包括两个分别沿x轴、y轴延伸的直线模组,x轴直线模组滑动连接于y轴直线模组的上方,以实现支承台222的二坐标移动。中控装置与x轴直线模组和y轴直线模组通讯连接,控制二者的启动和关闭。
137.在保护罩上对应支承台222的位置设置可开闭的窗,该窗为透明窗,放置植物301时打开窗,放置后关上窗。
138.此外,中控装置与内部结构表型成像装置101、外部性状表型成像装置102和生理表型成像装置103、回转电机208和升降电机213通讯连接,内部结构表型成像装置101、外部性状表型成像装置102和生理表型成像装置103的采集结果均回传至中控装置,中控装置将这些采集结果传输给图像重建系统进行图像处理等工作(ct图像由图像重建系统中的ct图像重建系统完成,其他的光学图像由光学图像重建系统进行三维展示和重建),中控装置根据设定的采集方案给予回转电机208和升降电机213指令,并且中控装置用于赋予图像位置信息。
139.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行改动、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。