1.本发明涉及电池领域,具体涉及一种电池极片的检测方法。
背景技术:
2.锂离子电池因能量密度高、自放电小、对环境友好而广泛应用于数码产品中,并且近年来随着无人机、电动汽车的发展,锂离子电池也获得更多的关注,如今使用设备对电池的能量密度、内阻、循环寿命等电化学性能方面提出了更高的要求。目前,在正、负极活性物质材料克容量都发挥到极致的情况下,如何进一步提高电芯容量成了锂电池领域的一个技术瓶颈。
3.为了提升电芯能量密度,通常在涂覆有活性物质的极片上设置若干极耳焊接区,将该极耳焊接区的活性物质涂层移除掉,再在极耳焊接区上焊接极耳。目前,锂电池极片清洗的主要清洗方式有贴发泡胶、激光清洗和机械清洗等。在极片清洗工序完成后,需要及时进行检测,避免极耳焊接区出现清洗质量不良的情况。现有的检测设备在检测具有多个清洗区(多极耳)的极片时容易产生定长误判和错位误判的问题,主要原因是由于前一个清洗区对后一个清洗区检测的干扰,具体表现如:在检测第二个及之后的清洗区时,会将第一个清洗区误判为涂布的起涂位置,导致定长误判;或者在检测第二个及之后的清洗区的正反面错位距时,出现分组错误的现象,导致错位距误判。这些误判的产生都有可能导致清洗、检测工序中断,影响生产效率和生产节奏。
技术实现要素:
4.本发明提供一种电池极片的检测方法,避免在多极耳极片检测过程中出现的定长误判的情况,由以下技术方案实现:
5.一种电池极片的检测方法,其特征在于,包括以下步骤:
6.(1)根据工艺要求确定某一清洗区的距起涂位置的定长l、到前序清洗区的距离s、清洗区在极片行进方向上的宽度w、工艺要求允许的定长误差l1;
7.(2a)根据步骤(1)所确定的距起涂位置的定长l、清洗区在极片行进方向上的宽度w和工艺要求允许的定长误差l1,在清洗机的参数设置页面设
8.定定长的上限值和下限值;
9.(2b)根据步骤(1)所确定的距起涂位置的定长l、到前序清洗区的距离s和工艺要求允许的定长误差l1,在清洗机的参数设置页面设定检测范围的上限值和下限值;
10.(3)进行极片清洗及清洗区检测。
11.上述技术方案中,通过在清洗区的参数设置页面中加入检测范围的设定,将检测范围限定至在该范围内只存在一个清洗区,即使相邻两个清洗区同时落入相机的视界之内,对超出检测范围的区域也不进行检测,避免了将前一个清洗区判断为极片的起涂位置,从而误判清洗区的定长不合格的情况。
12.进一步地,所述步骤(2b)中的检测范围的下限值大于所述步骤(1)中的所述距起
涂位置的定长l、到前序清洗区的距离s的差,且小于所述距起涂位置的定长l、工艺要求允许的定长误差的差。
13.进一步地,所述步骤(2a)中的定长的上限值等于所述步骤(1)中的所述距起涂位置的定长l、清洗区在极片行进方向上的宽度w、工艺要求允许的定长误差之和。
14.进一步地,所述步骤(2a)中的定长的下限值等于所述步骤(1)中的所述距起涂位置的定长l、工艺要求允许的定长误差的差。
15.进一步地,所述步骤(2b)中的检测范围的上限值大于所述步骤(1)中的所述距起涂位置的定长l、清洗区在极片行进方向上的宽度w、工艺要求允许的定长误差之和。
16.进一步地,所述步骤(2a)中的定长的下限值大于所述步骤(2b)中的检测范围的下限值;所述步骤(2a)中的定长的上限值小于所述步骤(2b)中的检测范围的上限值。
17.进一步地,所述步骤(1)还包括:根据工艺要求确定极片正反面的清洗区所允许的错位距x。
18.进一步地,在所述步骤(1)、(3)之间还包括步骤(2c):
19.(2c)根据步骤(1)所确定的错位距x,在清洗机的参数设置页面设定对齐度的上限值和下限值;
20.进一步地,所述步骤(2c)中的对齐度的上限值和下限值的绝对值等于工艺要求允许的错位距x。
21.进一步地,所述步骤(2a)、(2b)的顺序为(2b)、(2a)。
附图说明
22.图1为本发明实施例中极片的示意图。
23.图2为本发明实施例中清洗机的参数设置页面的示意图。
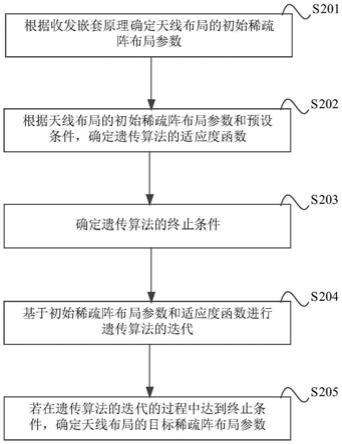
24.图3为本发明实施例提供的电池极片的检测方法的流程图。
具体实施方式
25.下面结合附图对本发明的具体实施方式作进一步说明,为了便于说明,本技术中可能会对上、下、左、右、前、后等方位进行定义,旨在便于清楚地描述构造的相对位置关系,并不用于产品在生产、使用、销售等过程中实际方位的限制。下面结合附图对本发明的具体实施方式作进一步说明:
26.请参阅图1-图3,本实施例提供一种电池极片的检测方法,用于多极耳极片的极耳焊接区的清洗质量检测。所述多极耳极片的极耳焊接区清洗是:在一次走带中(图1中箭头方向为走带方向),根据工艺要求,在距离极片的活性物质的起涂位置特定距离(定长)清洗出一个/组特定宽度的极耳焊接区。因此,在一个多极耳极片上需要清洗出多少个极耳焊接区,就需要进行多少次走带、清洗(工艺要求在极片正反面均清洗出极耳焊接区的极片上,每一次走带中在极片的正反面清洗出一组极耳焊接区,该组焊接区在极片行进方向上的中心线的距离为错位距)。在清洗每一个/组极耳焊接区后,都需要对本次清洗的极耳焊接区进行清洗质量检测。
27.所述电池极片的检测方法包括以下步骤:
28.(1)根据工艺要求确定某一清洗区的距起涂位置的定长l、到前序清洗区的距离s、
清洗区在极片行进方向上的宽度w、工艺要求允许的定长误差l1、工艺要求允许的错位距x;
29.(2a)根据步骤(1)所确定的距起涂位置的定长l、清洗区在极片行进方向上的宽度w和工艺要求允许的定长误差l1,在清洗机的参数设置页面设
30.定定长的上限值和下限值;
31.(2b)根据步骤(1)所确定的距起涂位置的定长l、到前序清洗区的距离s和工艺要求允许的定长误差l1,在清洗机的参数设置页面设定检测范围的上限值和下限值;
32.(2c)根据步骤(1)所确定的工艺要求允许的错位距x,在清洗机的参数设置页面设定对齐度的上限值和下限值;
33.(3)进行极片清洗及清洗区检测。
34.根据工艺要求的清洗位置和清洗参数,重复步骤(1)-(3),直至完成全部极耳焊接区的清洗和检测;步骤(2a)-(2c)的顺序可根据实际需要及操作人员的操作习惯调整。
35.所述步骤(2a)中的定长的下限值大于所述步骤(2b)中的检测范围的下限值;定长的上限值小于所述步骤(2b)中的检测范围的上限值。
36.所述步骤(2a)中的定长的上限值等于所述步骤(1)中的所述距起涂位置的定长l、清洗区在极片行进方向上的宽度w、工艺要求允许的定长误差之和;下限值等于所述步骤(1)中的所述距起涂位置的定长l、工艺要求允许的定长误差的差。通过对定长的上限值和下限值进行限制,判定清洗区的清洗位置是否落入允许的定长误差范围内,如落入该范围内,则判定为合格产品,如超出该范围,则判定为不合格产品。
37.所述步骤(2b)中的检测范围的上限值大于所述步骤(1)中的所述距起涂位置的定长l、清洗区在极片行进方向上的宽度w、工艺要求允许的定长误差之和;下限值大于所述步骤(1)中的所述距起涂位置的定长l、到前序清洗区的距离s的差,且小于所述距起涂位置的定长l、工艺要求允许的定长误差的差。通过限定检测范围的上限值和下限值,使得相邻两个清洗区即使同时落入相机的视界之内,对超出检测范围的区域也不进行检测,避免将前一个清洗区判断为极片的起涂位置,从而误判清洗区的定长不合格的情况;也避免了因将极片正反面两个位于不同位置的清洗区错误分组,导致错位距过大误判为不合格产品的情况。
38.所述步骤(2c)中的对齐度的上限值和下限值的绝对值等于工艺要求允许的错位距x。通过设定对齐度的上限值和下限值,判定极片正反面同一组的清洗区在极片行进方向上的中心线的距离是否落入允许的错位距范围内,如落入该范围内,则判定为合格产品,如超出该范围,则判定为不合格产品。
39.以上实施例仅为充分公开而非限制本发明,凡基于本发明的创作主旨、无需经过创造性劳动即可得到的等效技术特征的替换,应当视为本技术揭露的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。