技术特征:
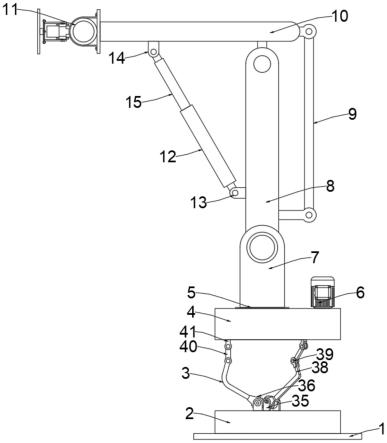
1.一种高强度的工业机器人联动臂腕,包括固定底板(1)和辅转动臂(10),其特征在于:所述辅转动臂(10)的一侧安装有角度调节组件(11),所述角度调节组件(11)包括固定板(42),固定板(42)与辅转动臂(10)固定连接,所述固定板(42)的一侧焊接固定有两个支撑板(45),前端所述支撑板(45)的前端安装有第四驱动电机(43),后端所述支撑板(45)的后端安装有第五驱动电机(44),两个所述支撑板(45)之间通过轴承转动连接有连接蜗杆(46),第四驱动电机(43)的输出轴端连接有连接蜗杆(46),所述第四驱动电机(43)的输出轴端连接有支撑架(47),所述支撑架(47)包括第一固定环(52)、第二固定环(53)和第三固定环(54),第三固定环(54)与第四驱动电机(43)的输出轴端通过键槽固定,第二固定环(53)和第三固定环(54)固定连接,第一固定环(52)设置于连接蜗杆(46)上轴外部沿前端所述支撑板(45)的前端,第二固定环(53)和第三固定环(54)设置于连接蜗杆(46)上轴外部沿后端所述支撑板(45)的后端,第一固定环(52)、第二固定环(53)和第三固定环(54)与连接蜗杆(46)上轴通过轴承转动连接,所述第一固定环(52)和第二固定环(53)一端的中间焊接固定有连接板(55),所述连接板(55)的另一端焊接固定有连接框架(56),所述连接框架(56)两侧面的中间一体连接有第四固定环(57),所述第四固定环(57)的外侧通过轴固定连接有侧杆(49),两个所述第四固定环(57)之间通过轴转动连接有调节齿轮(48),调节齿轮(48)与连接蜗杆(46)啮合,所述侧杆(49)的另一端通过螺栓连接有连接块(50),所述连接块(50)的另一端固定连接有安装板(51)。2.根据权利要求1所述的一种高强度的工业机器人联动臂腕,其特征在于:所述固定底板(1)的上端焊接固定有固定底座(2),固定底座(2)设置为空心结构,所述固定底座(2)的内部安装有转动电机,所述固定底座(2)上端的中间沿转动电机的输出轴端安装有竖向蜗杆(34),所述固定底座(2)的上端设置有升降调节单元(3),所述升降调节单元(3)包括第二支撑座(35),第二支撑座(35)焊接于固定底座(2)上,第二支撑座(35)环形排列于竖向蜗杆(34)外侧,所述第二支撑座(35)内通过轴转动连接有第一固定c形件(37),所述第一固定c形件(37)内固定连接有转动齿轮(36),转动齿轮(36)与竖向蜗杆(34)啮合,所述第一固定c形件的外端焊接固定有固定杆(38),所述固定杆(38)的另一端焊接固定有第二固定c形件(39),所述第二固定c形件(39)上通过轴转动连接有连接杆(40),所述连接杆(40)的另一端通过轴转动连接有第三支撑座(41)。3.根据权利要求2所述的一种高强度的工业机器人联动臂腕,其特征在于:所述升降调节单元(3)的上端设置有支撑台(4),第三支撑座(41)焊接固定于支撑台(4)下端,所述支撑台(4)上端的一侧设置有第一支撑座(7),所述第一支撑座(7)上端设置有主转动臂(8),主转动臂(8)与辅转动臂(10)远离角度调节组件(11)的一侧安装有辅助拉动单元(9)。4.根据权利要求3所述的一种高强度的工业机器人联动臂腕,其特征在于:所述第一支撑座(7)与主转动臂(8)之间通过驱动转动轴(17)连接,驱动转动轴(17)与主转动臂(8)固定连接,所述第一支撑座(7)的前端安装有第二驱动电机(16),第二驱动电机(16)的输出轴端与驱动转动轴(17)通过联轴器固定,所述第一支撑座(7)的后端安装有第三驱动电机(18),所述第一支撑座(7)内部下端沿第三驱动电机(18)的输出轴端安装有驱动齿轮(19),所述辅助拉动单元(9)包括下转动组件(20),所述下转动组件(20)包括下转动盘(22),下转动盘(22)与驱动转动轴(17)通过轴承转动连接,所述下转动盘(22)的外部设置有从动齿部(23),从动齿部(23)与驱动齿轮(19)啮合。
5.根据权利要求4所述的一种高强度的工业机器人联动臂腕,其特征在于:所述下转动盘(22)的上端焊接固定有下l形连接杆(24),所述下l形连接杆(24)上端面贯穿开设有镂空部(25),所述下l形连接杆(24)的另一端焊接固定有下转动片(26),所述辅助拉动单元(9)还包括上转动组件(21),所述上转动组件(21)包括上转动盘(29),上转动盘(29)的直径与下转动盘(22)的直径相同,所述上转动盘(29)的上端焊接固定有上l形连接杆(30),辅转动臂(10)靠近上l形连接杆(30)一侧开设有槽,上l形连接杆(30)嵌入槽内并与辅转动臂(10)焊接固定,上l形连接杆(30)与下l形连接杆(24)的截面尺寸相同,所述上l形连接杆(30)的另一端的前后两端焊接固定有上转动片(31),所述下转动组件(20)与上转动组件(21)之间设置有联动杆(27)和固定盘(28),联动杆(27)位于上下两个所述固定盘(28)之间,联动杆(27)和固定盘(28)焊接固定,上端所述固定盘(28)与上转动片(31)通过轴转动连接,下端所述固定盘(28)与下转动片(26)通过轴转动连接。6.根据权利要求5所述的一种高强度的工业机器人联动臂腕,其特征在于:所述主转动臂(8)与辅转动臂(10)之间设置有辅助支撑组件(12),所述辅助支撑组件(12)包括弹簧杆(15),所述弹簧杆(15)与主转动臂(8)通过第一转动件(13)连接,所述弹簧杆(15)与辅转动臂(10)通过第二转动件(14)连接,第一转动件(13)焊接于主转动臂(8)上,第二转动件(14)焊接于辅转动臂(10)上,第一转动件(13)和第二转动件(14)与弹簧杆(15)通过轴转动连接。7.根据权利要求6所述的一种高强度的工业机器人联动臂腕,其特征在于:所述支撑台(4)上端面的一侧转动连接有转动盘(5),第一支撑座(7)焊接固定于转动盘(5)上端,所述支撑台(4)内部沿转动盘(5)下端通过轴连接有从动转动齿轮(32),所述支撑台(4)内部沿从动转动齿轮(32)的一侧设置有驱动转动齿轮(33),驱动转动齿轮(33)与从动转动齿轮(32)啮合,所述支撑台(4)上端的另一侧安装有第一驱动电机(6),第一驱动电机(6)的输出轴端穿过支撑台(4)上端面与驱动转动齿轮(33)通过键槽固定。8.一种使用方法,基于权利要求7所述的一种高强度的工业机器人联动臂腕实现,其特征在于,包括如下步骤:步骤一:第一驱动电机(6)驱动驱动转动齿轮(33)转动,在驱动转动齿轮(33)和从动转动齿轮(32)的啮合作用下,从动转动齿轮(32)带动转动盘(5)转动,角度调节组件(11)朝向安装位置;步骤二:第二驱动电机(16)带动驱动转动轴(17)转动,直接带动主转动臂(8)转动,第三驱动电机(18)带动驱动齿轮(19)转动,通过驱动齿轮(19)与下转动盘(22)上从动齿部(23)的啮合关系带动下转动组件(20)转动,下转动组件(20)上下转动片(26)与联动杆(27)上固定盘(28)通过轴转动,拉动联动杆(27)向下或推动联动杆(27)向上,带动上转动组件(21)转动向下或向上,调节主转动臂(8)和辅转动臂(10)角度;步骤三:固定底座(2)内转动电机驱动竖向蜗杆(34)转动,通过竖向蜗杆(34)与转动齿轮(36)的啮合连接关系,带动与转动齿轮(36)固定的第一固定c形件(37)转动,与第一固定c形件(37)固定的固定杆(38)和第二固定c形件(39)同步转动,拉动连接杆(40)向下或推动连接杆(40)向上,支撑台(4)带动其上部结构整体向下或向上,角度调节组件(11)的安装板(51)基本与安装结构的安装部贴合;步骤四:第五驱动电机(44)驱动支撑架(47)转动,支撑架(47)、调节齿轮(48)、侧杆
(49)、连接块(50)和安装板(51)同步转动,安装板(51)绕连接蜗杆(46)转动,由于调节齿轮(48)绕轴转动时与连接蜗杆(46)啮合而以调节齿轮(48)中心为圆心转动,因此同时驱动第四驱动电机(43)带动连接蜗杆(46)转动,保持调节齿轮(48)仅绕连接蜗杆(46)转动,进行单一平面的小角度调节;步骤五:第四驱动电机(43)带动连接蜗杆(46)转动,在连接蜗杆(46)与调节齿轮(48)的啮合作用下,调节齿轮(48)以调节齿轮(48)中心为圆心转动,配合步骤四的绕连接蜗杆(46)转动方案,实现多平面的小角度调节。
技术总结
本发明公开了一种高强度的工业机器人联动臂腕及其使用方法,涉及工业机器人相关领域,为解决目前联动臂腕位置处与夹持机构端连接的组件为了保证多角度的转动,一般设置有电机和驱动盘实现单个平面的转动,再设置有一系列联动构件实现多平面的调节;需要多套结构配合动作,完成联动臂腕与夹持机构的安装面贴合,才能正常进行安装,且操作精度较低,难以进行小角度调节的问题。所述辅转动臂的一侧安装有角度调节组件,所述角度调节组件包括固定板,固定板与辅转动臂固定连接,所述固定板的一侧焊接固定有两个支撑板,前端所述支撑板的前端安装有第四驱动电机,后端所述支撑板的后端安装有第五驱动电机。端安装有第五驱动电机。端安装有第五驱动电机。
技术研发人员:吴宁钰 王兆权 郑祥盘 唐晓腾 陈炜
受保护的技术使用者:闽江学院
技术研发日:2022.04.29
技术公布日:2022/8/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。