1.本发明涉及软体机器人技术领域,具体涉及一种基于弹性驱动的仿生尺蠖软体机器人。
背景技术:
2.机器人领域的应用和发明已经有上百年的历史,但现今应用在生产和建设等领域的机器人绝大部分是材料刚度较高刚体机器人。现今的刚体机器人应用广泛,功能多样,但仍然有以下缺点需要攻克:无法在复杂地形上持续工作;无法应对多变环境;受体型限制只能在大型空间活动;难以简化控制流程。以上的缺点可以通过模仿动植物的运动原理创作出软体机器人来克服。
3.软体机器人从目前的已有的研究成果中能看出其广泛的应用方向。例如:在复杂的难拆卸的机械中进行结构检查和修复;在狭窄的空间中进行地形探索;在生产活动中任意改变形状来减少工具成本;在监控活动中凭借小体型和可变形状增强隐蔽性。然而现有仿生软体机器人造价成本高,移动性能差,前进后退可能性低,使用效果差。
技术实现要素:
4.为了解决上述技术问题,本发明提供了一种基于弹性驱动的仿生尺蠖软体机器人。
5.本发明解决上述技术问题的技术方案如下:一种基于弹簧驱动的仿生尺蠖软体机器人,包括两组关节模块、位于两组关节模块之间的连接模块以及分别设置在关节模块和连接模块之间的驱动模块;
6.驱动模块包括sma弹簧组和位于sma弹簧组下方的复位弹簧组,且sma 弹簧组和复位弹簧组相并联,sma弹簧组设置在关节模块和连接模块之间,复位弹簧组的一端设置在其中一个关节模块上,另一端贯穿连接模块并连接在另一个关节模块上。
7.进一步地,关节模块包括固定板、设置在固定板下端的触地单元以及设置在固定板上且朝向连接模块的端面上的立柱,sma弹簧组与立柱过盈配合。
8.进一步地,触地单元包括设置在固定板下端的腿节以及设置在腿节下方的脚节,腿节与固定板位于同一平面内且垂直于地面,腿节与脚节之间形成夹角,脚节与地面形成夹角。
9.进一步地,腿节与脚节形成135
°
夹角,脚节与地面形成45
°
夹角。
10.进一步地,触地单元呈l型结构。
11.进一步地,连接模块包括连接板、开设在连接板上的圆形孔以及设置在连接板上且位于圆形孔上方的柱塞,柱塞与立柱相对应,sma弹簧组设置在柱塞与立柱之间,复位弹簧组贯穿圆形孔并设置在两个关节模块的固定板之间。
12.进一步地,固定板上设置于用于固定sma弹簧的螺纹孔,使得sma弹簧始终与复位弹簧组处于并联状态。
13.进一步地,螺纹孔呈弧形结构。
14.进一步地,sma弹簧组采用镍-钛合金制成。
15.进一步地,复位弹簧组采用不锈钢材质制成。
16.本发明具有以下有益效果:本发明所提供的一种基于弹簧驱动的仿生尺蠖软体机器人,其结构可靠,使用性能好,所属的基于sma弹簧与不锈钢弹簧驱动的软体机器人的关节模块为硬质零件与结构,驱动模块由软材料制成,整体柔韧性好,具有良好的环境适应性。此外,仿生尺蠖软体机器人从仿生的角度出发,采用“l”型触地单元作为软体机器人的足部,采用驱动模块来模仿尺蠖的身体;将关节模块和驱动模块相结合,通过协调控制各个驱动模块和关节模块的运动顺序来实现模仿尺蠖运动;造价成本低,操作控制性能好。
附图说明
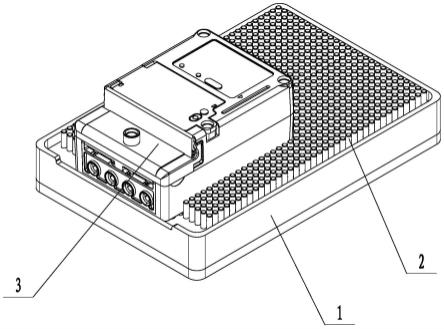
17.图1为本发明中仿生尺蠖软体机器人的主视图;
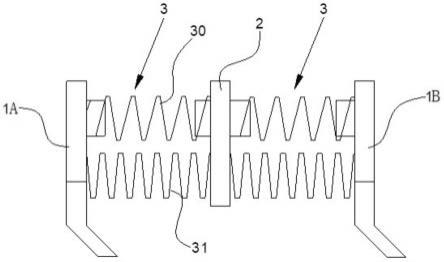
18.图2为本发明中关节模块及连接模块结构示意图;
19.图3为本发明中仿生尺蠖软体机器人第一运动状态示意图;
20.图4为本发明中仿生尺蠖软体机器人第二运动状态示意图。
具体实施方式
21.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
22.如图1所示,一种基于弹簧驱动的仿生尺蠖软体机器人,包括两组关节模块(包括关节模块1a和关节模块1b)、位于两组关节模块之间的连接模块2以及分别设置在关节模块和连接模块2之间的驱动模块3。驱动模块3 用于驱动关节模块和连接模块2进行仿生尺蠖运动,当驱动模块3运动时,两个关节模块的触地单元11在特定方向产生摩擦;通过协调控制驱动模块3 和关节模块可以实现仿生尺蠖运动。
23.驱动模块3包括sma弹簧组30和位于sma弹簧组30下方的复位弹簧组 31,且sma弹簧组30和复位弹簧组31相并联,sma弹簧组30设置在关节模块和连接模块2之间,复位弹簧组31的一端设置在第一关节模块1a上,另一端贯穿连接模块2并连接在第二关节模块1b上。sma弹簧组30采用镍
‑ꢀ
钛合金制成,复位弹簧组31采用不锈钢材质制成,其他零部件均由光敏树脂制造,不易变形,具有较高硬度。sma弹簧组30具有在高温下收缩,低温下强度降低易被拉伸的特点,通过电流加热提供驱动模块3的驱动力。当给 sma弹簧组30通电时,sma弹簧组30发生收缩变形,压缩复位弹簧组31使其收缩弯曲,当断电时,复位弹簧组31由于回弹力恢复原形,拉伸sma弹簧组30恢复原状。
24.如图2所示,关节模块包括固定板10、设置在固定板10下端的触地单元11以及设置在固定板10上且朝向连接模块2的端面上的立柱12,sma弹簧组30与立柱12过盈配合。触地单元11呈l型结构,触地单元11包括设置在固定板10下端的腿节110以及设置在腿节110下方的脚节111,腿节 110与固定板10位于同一平面内且垂直于地面,腿节110与脚节111之间形成夹角,脚节111与地面形成夹角。腿节110与脚节111形成135
°
夹角,脚节111与地面形成45
°
夹角。触地单元11的作用是向前后端关节模块提供在特定方向上不同大小的摩擦力,使前后端关节模块在相互靠近时前端位置不动,后端位置靠近前端,使前后端关节模块在相
互远离时,后端位置不动,前端位置远离后端。
25.当给sma弹簧组30通电时,sma弹簧组30发生收缩,压缩复位弹簧组 31使其收缩弯曲,此时两组关节模块相互靠近,“l”型触地单元11的脚节 111与地面呈45
°
,前端的第一关节模块1a的脚节111与其前进方向形成 135
°
夹角,后端的第二关节模块1b的脚节111与其前进方向形成45
°
夹角,则前端的第一关节模块1a的脚节111所受摩擦力小于后端的第二关节模块 1b所受摩擦力,此时前后端关节模块相互靠近,则前端的第一关节模块1a 位置不变,后端的第二关节模块1b向靠近前端的第一关节模块1a方向移动。
26.当给sma弹簧组30断电时,复位弹簧由于回弹力恢复原形,拉伸sma 弹簧组30恢复原状,此时前后关节模块相互远离,“l”型触地单元11的脚节111与地面呈45
°
,前端的第一关节模块1a的脚节111与其前进方向形成45
°
夹角,后端的关节模块1b的脚节111与其前进方向形成135
°
夹角,则前端的关节模块1a的脚节111所受摩擦力大于后端的关节模块1b所受摩擦力,此时前后端关节模块相互远离,则前端的关节模块1a位置向远离后端的关节模块1b方向移动,后端的关节模块1b位置不变。从而通过协调控制驱动模块3和关节模块,软体机器人可以实现前进,后退运动;在特定的控制方式下软体机器人可以模仿尺蠖运动。
27.连接模块2包括连接板20、开设在连接板20上的圆形孔21以及设置在连接板20上且位于圆形孔21上方的柱塞22,柱塞22与立柱12相对应,sma 弹簧组30设置在柱塞22与立柱12之间,复位弹簧组31贯穿圆形孔21并设置在两个关节模块的固定板10之间。圆形孔21用于工作过程中限制sma 弹簧组30与复位弹簧组31的相对位置,防止侧翻。
28.固定板10上设置有用于固定sma弹簧的螺纹孔13,使得sma弹簧始终与复位弹簧组31处于并联状态。螺纹孔13呈弧形结构,sma弹簧组30穿过螺纹孔13并用胶水固定。
29.本发明的仿生尺蠖软体机器人在模仿尺蠖的运动时通过协调控制驱动模块3和关节模块的运动顺序来实现,如图3-4,具体控制顺序为:1、驱动复位弹簧组31收缩,如图3;2、驱动复位弹簧组31伸长,如图4;此两步为模仿尺蠖运动的一个控制周期。
30.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。