技术特征:
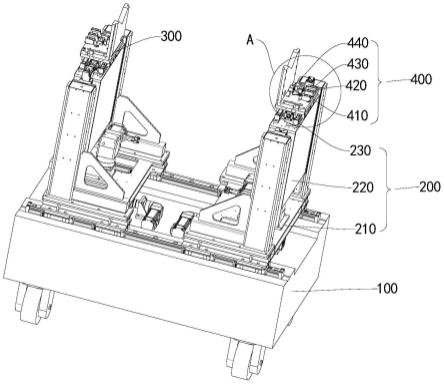
1.一种协同装置,其特征在于,用于对接筒体与机台旋转轴,所述协同装置包括:底座;至少两个纠偏机构,间隔设置于所述底座上,并能够分别沿着第一方向、第二方向、第三方向运动;其中,所述第一方向与所述筒体的轴线相平行,所述第二方向与所述第一方向垂直,所述第三方向同时垂直于所述第一方向与第二方向;支撑机构,所述支撑机构位于所述纠偏机构上,所述支撑机构远离所述纠偏机构的一端用于支撑所述筒体;传感器组,安装在所述支撑机构上,所述传感器组件用于检测所述筒体与机台旋转轴的方向偏差;其中,所述纠偏机构用于驱动所述支撑机构沿着所述第一方向、所述第二方向、所述第三方向运动,调整所述筒体的位置,以补偿所述方向偏差。2.如权利要求1所述的协同装置,其特征在于,所述传感器组包括:第一激光测距仪、第二激光测距仪、第三激光测距仪;所述第一激光测距仪、所述第二激光测距仪、所述第三激光测距仪沿着第二方向等间距地设置在所述支撑机构远离所述纠偏机构的侧面;所述第二激光测距仪用于测量激光发射点与机台旋转轴表面的间距,以获取第二方向偏差;所述第一激光测距仪、所述第三激光测距仪分别用于测量各自发射端与机台旋转轴表面的间距,以获取第三方向偏差。3.如权利要求2所述的协同装置,其特征在于,所述传感器组还包括:第四激光测距仪;所述第四激光测距仪设置在所述支撑机构远离所述纠偏机构的一端,并与所述第二激光测距仪相对设置,且所述第二激光测距仪的中心、所述第四激光测距仪的中心在同一条直线上,所述第四激光测距仪用于测量自身的激光发射点与所述筒体表面的间距,以得到第一方向偏差。4.如权利要求1-3任一项所述的协同装置,其特征在于,所述纠偏机构包括:第一滑动组件,设置于底座的侧面,并能够沿着第一方向相对所述底座滑动;第二滑动组件,设置于所述第一滑动组件远离所述底座的侧面,并能够沿着第二方向相对第一滑动组件滑动;第三滑动组件,设置于所述第二滑动组件远离所述第一滑动组件的侧面,并能够沿着第三方向相对第二滑动组件滑动。5.一种协同方法,其特征在于,应用于权利要求1-4任一项所述的协同装置,所述方法包括以下步骤:基于所述传感器组,获取所述筒体与机台旋转轴的方向偏差;根据所述方向偏差,并基于位于所述底座上的所述纠偏结构,驱动所述支撑机构沿着第一方向、第二方向、第三方向运动,以调整所述筒体的位置。6.根据权利要求5所述的协同方法,其特征在于,所述传感器组包括第一激光测距仪、第二激光测距仪、第三激光测距仪,所述基于传感器组,测量所述筒体与机台旋转轴的方向偏差,包括:基于所述第二激光测距仪,获取所述筒体与所述机台旋转轴的第二方向偏差;
基于第一激光测距仪、所述第三激光测距仪,获取所述筒体与所述机台旋转轴的第三方向偏差。7.根据权利要求6所述的协同方法,其特征在于,所述获取所述筒体与所述机台旋转轴的第三方向偏差,包括:获取所述第一激光测距仪与所述第三激光测距仪之间的第一间距;获取所述第三激光测距仪的激光发射口与所述筒体的第二间距;根据所述第一间距、所述第二间距,利用反三角函数获取角度数值;获取三角形的中线长度,其中,所述三角形为:第一激光测距仪所发射的激光线与所述旋转轴的周侧面的第一接触点、第三激光测距仪所发射的激光线与所述旋转轴的周侧面的第二接触点与所述旋转轴的圆周面圆心所构成的三角形;根据所述角度数值、所述中线长度,利用三角函数计算得到第三方向偏差。8.根据权利要求5-7任一项所述的协同方法,其特征在于,所述方法还包括:当所述方向偏差中的第二方向偏差在第一预设范围值内时,获取第二方向理论值偏差,根据所述第二方向理论值偏差,调整所述筒体的位置,矫正第二方向偏差,以使所述筒体与所述旋转轴对接;当所述方向偏差中的第三方向偏差在第二预设范围值内时,获取第三方向理论值偏差,根据所述第三方向理论值偏差,调整所述筒体的位置,矫正第三方向偏差,以使所述筒体与所述旋转轴对接。9.根据权利要求8所述的协同方法,其特征在于,所述筒体结构包括第一端、第二端,所述根据所述第三方向理论值偏差,调整所述筒体的位置,矫正第三方向偏差,包括:间隔预设时间,周期性采集所述第一端的第三方向偏差、所述第二端的第三方向偏差;剔除所述第三方向偏差集中的异常值,得到所述第一端、所述第二端的有效第三方向偏差集;根据所述有效第三方向偏差集,计算所述第一端的第三方向偏差平均值、所述第二端的第三方向偏差平均值,得到所述第一端的第三方向理论偏差值、所述第二端的第三方向理论偏差值;根据所述第一端的第三方向理论偏差值,驱动所述支撑机构至少在第三方向上运动,调整所述筒体的第一端位置;根据所述第二端的第三方向理论偏差值,驱动所述支撑机构至少在第三方向上运动,调整所述筒体的第二端位置。10.一种电子设备,其特征在于,所述电子设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的计算机程序,其中所述计算机程序被所述处理器执行时,实现如权利要求5至9中任一项所述协同方法的步骤。11.一种装配系统,其特征在于,包括协同装置和机台,其中,所述协同装置用于执行权利要求5至9中任一项所述的协同方法的步骤,以将所述筒体与所述机台的旋转轴对接。12.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,其中所述计算机程序被处理器执行时,实现如权利要求5至9中任一项所述的协同方法的步骤。
技术总结
本申请涉及卷料技术领域,提供了一种协同装置、方法、装配系统、电子设备及存储介质,用于对接筒体与机台旋转轴,该装置包括:底座;至少两个纠偏机构,间隔设置于底座上,并能够分别沿着第一方向、第二方向、第三方向运动;支撑机构,支撑机构位于纠偏机构上,支撑机构远离纠偏机构的一端用于支撑筒体;传感器组,安装在支撑机构上,传感器组件用于检测筒体与机台旋转轴的方向偏差。通过传感器组,可以精确测量筒体与机台旋转轴的方向偏差,然后根据方向偏差,启动纠偏机构,在第一方向、第二方向、第三方向上调整支撑机构的位置,以调整筒体,多个方向的全向调整纠正筒体,效率高,对接精确。对接精确。对接精确。
技术研发人员:刘英南 冉东来 张弢
受保护的技术使用者:深圳优艾智合机器人科技有限公司
技术研发日:2022.04.29
技术公布日:2022/8/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。