1.本公开涉及器械领域,尤其涉及一种可引导生长器械及手术机器人系统。
背景技术:
2.传统疾病诊断和手术治疗主要分为开放诊断和手术以及腔内介入诊断和治疗。腔内介入诊断或治疗是在不开刀暴露病灶的情况下,在血管、皮肤上进行切口形成通道,或经人体原有的腔道,在影像设备的引导下到达目标位置,对病灶局部进行诊断或治疗,具有创伤小的特点。
3.传统腔内介入手术主要靠医生进行手动操作。为了减轻医生的负担,提高腔内介入的效率与安全性,利用腔内介入器械辅助进行介入诊断或手术的方法渐渐成为行业的研究热点。腔内介入器械具有运动精准、重复定位精度高、可以远程操控等优点,同时也可以消除手动操作过程中医生的生理颤抖和疲劳时的误操作带来的危险。
4.但是目前采用的器械辅助介入诊断或手术的方法存在以下问题:1.介入器械体积较大,限制了器械辅助腔内介入诊断或手术的进一步推广;2.介入器械的柔性相对较差,不能适应弯曲复杂的人体腔道,而且会对腔道造成损伤。
技术实现要素:
5.基于以上问题,本公开提供一种可引导生长器械及手术机器人系统,具有较好的柔性,可以实现可控生长延伸,可以很好地适应逐渐变窄的弯曲复杂的腔道。
6.在一些实施例中,本公开提供了一种可引导生长器械,包括:可生长管,可生长管包括内层、外层以及位于内层和外层之间的流体腔,流体腔用于容纳流体;可生长管包括位于远端处的可翻展区域,内层和外层在可翻展区域相连并且可翻展,引导器,设置在由可生长管的内层包围的通道中,引导器的远端可弯曲以带动可生长管弯转。
7.在一些实施例中,本公开提供了一种手术机器人系统,包括系统控制器和如上述的可引导生长器械,系统控制器被配置成控制可引导生长器械的运动。
附图说明
8.为了更清楚地说明本公开实施例中的技术方案,下面将对本公开实施例描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅示出本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据本公开实施例的内容和这些附图获得其他的实施例。
9.图1示出根据本公开一些实施例的可引导生长器械的远端部分结构示意图;
10.图2示出根据本公开一些实施例的可引导生长器械位于体内腔道内的远端部分结构示意图;
11.图3(a)示出根据本公开一些实施例的可生长管的横截面图;
12.图3(b)示出根据本公开一些实施例的可生长管的另一横截面图;
13.图4(a)示出根据本公开一些实施例的渐变式可生长管的远端结构示意图;
14.图4(b)示出根据本公开一些实施例的另一渐变式可生长管的远端结构示意图;
15.图5(a)示出根据本公开一些实施例的阶跃式可生长管的远端结构示意图;
16.图5(b)示出根据本公开一些实施例的另一阶跃式可生长管的远端结构示意图;
17.图6(a)示出根据本公开一些实施例的管驱动机构的部分结构示意图;
18.图6(b)示出根据本公开一些实施例的另一管驱动机构的部分结构示意图;
19.图7示出根据本公开一些实施例的可引导生长器械的结构示意图;
20.图8示出根据本公开一些实施例的另一可引导生长器械的结构示意图;
21.图9示出根据本公开一些实施例的引导器的结构示意图;
22.图10(a)示出根据本公开一些实施例的引导器驱动机构的结构示意图;
23.图10(b)示出根据本公开一些实施例的另一引导器驱动机构的结构示意图;
24.图11示出根据本公开一些实施例的另一引导器的结构示意图;
25.图12示出根据本公开一些实施例的另一引导器的结构示意图;
26.图13示出根据本公开一些实施例的引导器的转弯构件的结构示意图;
27.图14示出根据本公开一些实施例的弯转单元的结构示意图;
28.图15示出根据本公开一些实施例的引导器的另一转弯构件的结构示意图;
29.图16示出根据本公开一些实施例的狭缝单元的结构示意图;
30.图17示出根据本公开一些实施例的引导器的另一转弯构件的纵向剖视图。
具体实施方式
31.为使本公开解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面将结合附图对本公开实施例的技术方案作进一步的详细描述,显然,所描述的实施例仅仅是本公开一部分实施例,而不是全部的实施例。基于本公开中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都落入本公开保护的范围。
32.在本公开的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本公开和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本公开的限制。此外,术语“第一”、“第二”、仅用于描述目的,而不能理解为指示或暗示相对重要性。在本公开的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“耦合”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本公开中的具体含义。
33.在本公开中,定义靠近操作者(例如医生)的一端为近端、近部或后端、后部,靠近手术患者的一端为远端、远部或前端、前部。本领域技术人员可以理解,根据本公开实施例的可引导生长器械可以用于医疗领域,也可以用于其他非医疗领域。
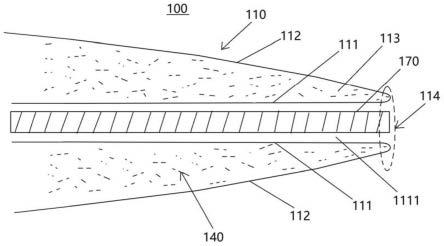
34.图1示出根据本公开一些实施例的可引导生长器械100的远端部分结构示意图,图2示出根据本公开一些实施例的可引导生长器械100位于体内(例如人体内或动物体内)腔道115(例如血管、气管、食道、阴道、肠道等等)内的远端部分结构示意图。可引导生长器械
100可以通过开口(例如切口或者自然开口)进入腔道115。如图1和图2所示,可引导生长器械100可以包括可生长管110。可生长管110可以包括柔性材料。可生长管110包括内层111、外层112以及位于内层111和外层112之间的流体腔113。流体腔113用于容纳流体140。可生长管110还包括位于远端处的可翻展区域114,内层111和外层112在可翻展区域114中相连并且可翻展。在一些实施例中,外层112近端的径向尺寸大于外层112远端的径向尺寸,如图1所示。本领域技术人员应该理解,在一些实施例中,外层112近端的径向尺寸可以等于或者小于外层112远端的径向尺寸。内层111可以在可翻展区域114外翻形成外层112,或者外层112可以在可翻展区域114内翻形成内层111。通过内层111与外层112之间的翻展,可生长管110可以向远端生长(例如延伸或延展)或回撤,以便于可引导生长器械100在腔道115内生长到达目标位置或者从腔道115回撤。例如,内层111向远端移动长度l,在可翻展区域114中长度为l的内层111外翻,形成外层112,流体140填充由内层111外翻而生长的流体腔113,从而可生长管110可以向前生长。内层111向近端移动长度l’,在可翻展区域114中长度为l’的外层112内翻,形成内层111,从而可生长管110可以回撤。
35.在一些实施例中,可引导生长器械100还可以包括在远端至少一个自由度上可弯转的引导器170。可生长管110的内层111包围形成通道1111,引导器170设置在通道1111内,引导器170的远端在弯转时可以带动可生长管110弯转。通过引导器170的弯转引导,可以实现可生长管110的转向以适应弯曲复杂的腔道115。从而,可生长管110可以向远端生长,穿过腔道115,生长到达目标位置。在一些实施例中,外层112近端的径向尺寸可以大于外层112远端的径向尺寸。这样,可引导生长器械100能够适应逐渐变窄的腔道115,以减少或避免与腔道115的触碰和摩擦。在一些实施例中,引导器170可以包括位于远端的内窥镜、手术执行器、给药器等等。
36.图3(a)和图3(b)分别示出根据本公开一些实施例的可生长管110的横截面图。在一些实施例中,如图3(a)所示,可生长管110的横截面可以呈圆形。在一些实施例中,如图3(b)所示,可生长管110的横截面可以呈椭圆形。应当理解,可生长管110的横截面包括但不限于上述实施例的结构,可以包括其他形状,例如矩形、多边形等等。在一些实施例中,可生长管110包括柔性材料,包括但不限于塑料、橡胶等,例如低密度聚乙烯、含硅聚合物或者含氟聚合物等。柔性的可生长管110可以避免对腔道115造成损坏。
37.图4(a)和图4(b)分别示出根据本公开一些实施例的渐变式可生长管110和210的远端部分结构示意图。如图4(a)所示,在一些实施例中,外层112的径向尺寸可以从近端向远端延伸方向逐渐减小。外层112的轮廓可以是直线、曲线或其组合。可以理解,图4(a)和图4(b)所示的可生长管110和210的形态可以是生长过程中的形态或者生长停止时的形态。可生长管110的内层111可以从近端向远端延伸方向保持基本不变,在翻展停止的状态下(例如完全生长状态、或接近病灶位置时),流体腔113的厚度从近端向远端延伸方向逐渐减小。内层111包围形成通道1111,通道1111的径向尺寸从近端向远端延伸方向保持基本不变,通道1111可以用于容纳引导器170。内层111或外层112可被驱动以向远端或近端移动。例如,内层111向远端移动长度l,在可翻展区域114中长度为l的内层111外翻,形成外层112,流体140填充由内层111外翻而生长的流体腔113,从而可生长管110可以向前生长。内层111向近端移动长度l’,在可翻展区域114中长度为l’的外层112内翻,形成内层111,从而可生长管110可以回撤。
38.如图4(b)所示,外层212的径向尺寸可以从近端向远端延伸方向逐渐减小。外层212的轮廓可以是直线、曲线或其组合。可生长管210的内层211可以从近端向远端延伸方向逐渐减小,在翻展停止的状态下(例如完全生长状态、或接近病灶位置时),使得流体腔213的厚度从近端向远端延伸方向保持基本不变或者逐渐减小。内层211包围形成通道2111,通道2111的径向尺寸从近端向远端延伸方向逐渐减小。通道2111可以用于容纳引导器170。内层111或外层112可被驱动以向远端或近端移动,使得内层211可以在可翻展区域214外翻形成外层212,或者外层212可以在可翻展区域214内翻形成内层211。
39.图5(a)和图5(b)分别示出根据本公开一些实施例的阶跃式可生长管310和510的远端部分结构示意图。在一些实施例中,如图5(a)和图5(b)所示,外层312和512的径向尺寸可以从近端向远端延伸方向呈阶跃式减小。在本公开中,阶跃式是指层的轮廓斜率在阶跃区域处出现明显变化。可以理解,5(a)和图5(b)所示的可生长管310和510的形态可以是生长过程中的形态或者生长停止时的形态。在一些实施例中,如图5(a)所示,外层312可以包括近段3121和远段3122,近段3121的径向尺寸从近端向远端延伸方向逐渐减小,远段3122的径向尺寸从近端向远端延伸方向逐渐减小,近段3121的轮廓斜率在连接处和远段3122在连接处的轮廓斜率不同,以形成阶跃式轮廓。可生长管310的内层311可以从近端向远端延伸方向保持基本不变。在翻展停止的状态下(例如完全生长状态、或接近病灶位置时),流体腔313的厚度从近端向远端延伸方向阶跃式减小。内层311包围形成通道3111,通道3111的径向尺寸从近端向远端延伸方向保持基本不变,通道3111用于容纳引导器170。内层311或外层312可被驱动以向远端或近端移动。例如,内层311向远端移动长度l,在可翻展区域314中长度为l的内层311外翻,形成外层312,流体340填充由内层311外翻而生长的流体腔313,从而可生长管310可以向前生长。内层311向近端移动长度l’,在可翻展区域314中长度为l’的外层312内翻,形成内层311,从而可生长管310可以回撤。
40.在一些实施例中,如图5(b)所示,外层512可以包括径向尺寸不同的多段组成的阶跃式轮廓。如图5(b)所示,外层512可以依次包括径向尺寸不同的近段5121a、近段5121b、远段5122a和远段5122b,近段5121a和远段5122a的径向尺寸保持基本不变、近段5121b和远段5122b的径向尺寸分别从近端向远端延伸方向逐渐减小。近段5121a和近段5121b在连接区域处可以是渐变或突变连接,近段5121b和远段5122a在连接区域处可以是渐变或突变连接,远段5122a和远段5122b在连接区域处可以是渐变或突变连接,以形成多段阶跃式轮廓。可生长管510的内层511的径向尺寸可以从近端向远端延伸方向保持基本不变或逐渐减小。在翻展停止的状态下(例如完全生长状态、或接近病灶位置时),流体腔513的厚度从近段5121a、近段5121b、远段5122a和远段5122b延伸方向减小。内层511包围形成通道5111,通道5111的径向尺寸从近端向远端延伸方向保持基本不变,通道5111用于容纳引导器170。内层511或外层512可被驱动以向远端或近端移动,使得内层511可以在可翻展区域514外翻形成外层512,或者外层512可以在可翻展区域514内翻形成内层511。
41.可引导生长器械100可以包括可生长管110、210、310、510中的一个。在一些实施例中,可引导生长器械100还可以包括管驱动机构120。图6(a)示出根据本公开一些实施例的管驱动机构120的部分结构示意图。如图6(a)所示,管驱动机构120与可生长管110(或210、310、510)连接,管驱动机构120可线性运动,用于驱动可生长管110的外层112或内层111运动。在一些实施例中,管驱动机构120可以与可生长管110的外层112连接,从而驱动可生长
管110的外层112运动。在一些实施例中,如图6(a)所示,管驱动机构120可以与可生长管110的内层111连接,从而驱动可生长管110的内层111运动。
42.在一些实施例中,如图6(a)所示,管驱动机构120可以包括并列设置的两个滚轮121a和121b、设置在两个滚轮121a-b之间的移动杆122、以及与两个滚轮121a-b分别连接的驱动单元(图中未示)。可生长管110(或210、310、510)的内层111密封连接在移动杆122的远端外周。驱动单元分别驱动两个滚轮121a-b同步等速反向旋转以带动移动杆122线性移动,从而通过移动杆122驱动可生长管110的内层111运动。移动杆122驱动内层111向远端运动,在可翻展区域114,内层111外翻形成外层112,使流体140充满随内层111外翻而生长的流体腔113。在一些实施例中,可生长管110由内层111翻展而延伸的距离与移动杆122移动的距离大致相等。在一些实施例中,可生长管110由内层111翻展而延伸的距离小于移动杆122移动的距离。
43.在一些实施例中,如图6(a)所示,引导器170设置在通道1111内,引导器170的近端穿过移动杆122的内腔,并且与引导器驱动机构(图中未示)连接,引导器170在引导器驱动机构的驱动下向远端移动,与可生长管110的生长同步。引导器170的远端可以在引导器驱动机构的驱动下发生弯转,从而可以带动可生长管110弯转。通过引导器170可以实现可生长管110的转向以适应弯曲复杂的腔道115。
44.可引导生长器械200可以包括可生长管110、210、310、510中的一个,以及管驱动机构220。图6(b)示出根据本公开一些实施例的管驱动机构220的部分结构示意图。在一些实施例中,如图6(b)所示,管驱动机构220可以包括丝杆滑块模组221以及由丝杆滑块模组221驱动的移动杆222。丝杆滑块模组221可以包括通过螺纹连接的丝杆223和滑块224、与滑块224固定连接的移动杆222以及与丝杆223连接的驱动单元(图中未示)。在一些实施例中,丝杆滑块模组221还可以包括滑动穿设在滑块224上的导杆225。可生长管110(或210-610)的外层112或内层111与移动杆222密封连接。驱动单元驱动丝杆223旋转,滑块224可以沿导杆225线性移动,驱动与滑块224固定连接的移动杆222线性移动,从而驱动可生长管110的外层112或内层111运动。
45.应当理解,本公开的管驱动机构包括但不限于上述实施例的结构,只要能够实现线性运动的驱动机构均不脱离本公开的范围。
46.图7示出根据本公开一些实施例的可引导生长器械100(或200)的结构示意图。如图7所示,在一些实施例中,可引导生长器械100(或200)还包括流体控制器130。流体控制器130用于向流体140加压,以驱动流体140逐渐充满外层112和内层111之间的流体腔113。在一些实施例中,流体140可以为液态流体,例如生理盐水,或者为气态流体,例如空气、二氧化碳气体或者其他惰性气体。在一些实施例中,流体控制器130可以包括气体泵或液体泵等。
47.在一些实施例中,如图7所示,可引导生长器械100(或200)还可以包括流体箱150。流体箱150可以包括流体出口通道151和流体控制通道152,流体控制器130通过流体控制通道152与流体箱150连通。控制通道152可以包括流体导管、开关等等。在一些实施例中,可生长管110的外层112可以密封连接在流体出口通道151的外周,可生长管110的内层111可以穿过流体出口通道151向流体箱150近端延伸并且和管驱动机构120的移动杆122密封连接。管驱动机构120可以驱动可生长管110的内层111向远端或者近端移动。流体控制器130可以
控制流体箱150以及流体腔113中的流体压强,例如将流体箱150和流体腔113中的压强维持在预定值或预定区间。在一些实施例中,当外层112或内层111被管驱动机构120驱动以在可翻展区域114中翻展时,流体控制器130可以控制流体140填充生长的流体腔113或从回撤的流体腔113收回。例如,管驱动机构120驱动可生长管110的内层111向远端移动长度l,内层111在可翻展区域114外翻长度l,形成外层112,使得流体腔113向远端生长。流体控制器130向流体箱150内加压(例如注入流体),使流体140向可生长管110的流体腔113填充,从而填充可翻展区域114中生长的流体腔113。再例如,管驱动机构120驱动可生长管110的内层111向近端移动长度l’,外层112在可翻展区域114内翻长度l’,形成内层111,使得流体腔113向近端回撤。流体控制器130对流体箱150内减压(例如抽出流体),使流体140从可生长管110的流体腔113中回撤至流体箱150,从而使可生长管110向近端回撤。在一些实施例中,翻展生长或回撤的距离与管驱动机构120移动的距离基本相等。在一些实施例中,翻展生长或回撤的距离小于管驱动机构120移动的距离。
48.在一些实施例中,管驱动机构120可以设置在流体箱150外侧,可生长管110的内层111可以延伸贯穿流体箱150与管驱动机构120连接。在一些实施例中,如图7所示,管驱动机构120的移动杆122至少一部分可以设置在流体箱150内侧与可生长管110的内层111连接。
49.在一些实施例中,引导器170设置在通道1111内,引导器170的近端通过管驱动机构120的移动杆122的内腔与引导器驱动机构(图中未示)连接,引导器170的远端在引导器驱动机构的驱动下发生弯转,从而可以带动可生长管110弯转。
50.在一些实施例中,可引导生长器械100还包括系统控制器(图中未示),通过系统控制器控制管驱动机构120的移动距离以及流体控制器130施加在流体腔113内的压强,从而使可引导生长器械100可以可控地生长。在一些实施例中,系统控制器可以控制流体控制器130,例如向流体控制器130发送加压、减压指令。在一些实施例中,系统控制器还可以控制引导器270的弯转,以便对可引导生长器械200进行生长方向控制。
51.如图7所示,在一些实施例中,可引导生长器械100还包括压强传感器160。压强传感器160可以设置在流体箱150上,用于检测流体箱150内的压强。压强传感器160可以连接到流体控制器130,以便向流体控制器130发送流体箱150内的流体压强信号。流体控制器130可以根据流体压强信号来控制流体腔150以及流体腔113中的流体压强。
52.图8示出根据本公开一些实施例的可引导生长器械200(或100)的结构示意图。在一些实施例中,如图8所示,可引导生长器械200(或100)还可以包括流体箱250,流体箱250包括流体出口通道251和流体控制通道252,流体控制器230通过流体控制通道252与流体箱250连通。流体箱250内可以设有至少一个密封圈253,密封圈253外周与流体箱250的内壁密封贴合。流体出口通道251呈环状,可生长管210的内层211密封连接在流体出口通道251的内环壁的内侧或外侧,可生长管210的外层212穿过流体出口通道251向流体箱250近端延伸和密封圈253密封连接,密封圈253和管驱动机构220的移动杆222通过至少一个连接杆226紧固连接。管驱动机构220的移动杆222至少一部分设置在流体箱250内侧,与密封圈253连接,以驱动密封圈253沿流体箱250的长度方向线性移动。密封圈253可以防止流体箱250内的流体240从可生长管210的外层212与流体箱250的内层之间的间隙泄漏。例如,管驱动机构220驱动可生长管210的外层212向远端移动长度l,在可翻展区域214中长度为l的外层212内翻,形成内层211,流体240填充由外层212内翻而生长的流体腔213,从而可生长管210
可以向前生长。外层212向近端移动长度l’,在可翻展区域214中长度为l’的内层211外翻,形成外层212,从而可生长管210可以回撤。在一些实施例中,如图8所示,压强传感器260设置在流体箱250上,用于检测流体箱250内的压强。压强传感器260可以连接到流体控制器230,以便向流体控制器230发送流体箱250内的流体压强信号。流体控制器230可以根据流体压强信号来控制流体箱250以及流体腔213中的流体压强。
53.在一些实施例中,引导器270设置在通道2111内,引导器270的近端通过管驱动机构220的移动杆222的内腔与引导器驱动机构(图中未示)连接,引导器270的远端在引导器驱动机构的驱动下发生弯转,从而可以带动可生长管210弯转。在一些实施例中,可引导生长器械200还包括系统控制器(图中未示),通过系统控制器控制管驱动机构220的移动距离以及流体控制器230施加在流体腔213内的压强,从而使可引导生长器械200可以精准工作。在一些实施例中,系统控制器可以控制流体控制器230,例如向流体控制器230发送加压、减压指令。在一些实施例中,系统控制器还可以控制引导器270的弯转,以便对可引导生长器械200进行生长方向控制。
54.图9示出根据本公开一些实施例的引导器170的结构示意图。在一些实施例中,如图9所示,引导器170可以包括至少一个远端连续体172。远端连续体172包括远端基盘1721、远端止盘1722和多根第一结构骨1723。远端基盘1721和远端止盘1722间隔布置,多根第一结构骨1723的远端与远端止盘1722紧固连接,多根第一结构骨1723的近端穿过远端基盘1721。在一些实施例中,多根第一结构骨1723的远端沿周向间隔紧固设置在远端止盘1722上。例如,多根第一结构骨1723可以均匀间隔设置或者规律的对称设置。在一些实施例中,多根第一结构骨1723可以为镍钛合金丝、钢丝等等。在一些实施例中,第一结构骨1723的数量可以为4根,协同推拉对应设置的两根结构骨,可以实现远端连续体172向第一自由度方向的弯转,协同推拉对应设置的另外两根结构骨,可以实现远端连续体172向第二自由度方向的弯转,从而使引导器170具有至少一个方向上的自由度。在一些实施例中,第一结构骨1723的数量还可以为6根、8根、12根等等。第一结构骨1723的数量可以包括但不限于上述实施例中的数量。
55.如图9所示,在一些实施例中,引导器170可以包括串联的远端连续体172、172’。位于远端的远端连续体172的远端基盘1721成为位于近端的远端连续体172’的远端止盘1722’。设置两个或更多个远端连续体172可以增加引导器170的弯转灵活性。
56.在一些实施例中,如图9所示,远端连续体172、172’还可以包括设置在远端基盘1721和远端止盘1722之间、远端基盘1721’和远端止盘1722’之间的至少一个远端间隔盘1724、1724’,多根第一结构骨1723的近端依次穿过至少一个远端间隔盘1724、远端基盘1721、远端间隔盘1724’和远端基盘1721’,多根第一结构骨1723’的近端依次穿过至少一个远端间隔盘1724’和远端基盘1721’。设置远端间隔盘1724、1724’可以加强多根第一结构骨1723、1723’在推拉过程中的稳定性。
57.在一些实施例中,可引导生长器械100(或200)还可以包括引导器驱动机构,引导器驱动机构可以与多根第一结构骨1723、1723’连接,通过推拉第一结构骨1723、1723’以带动远端连续体172、172’在空间中向不同方向的弯转。图10(a)示出根据本公开一些实施例的引导器驱动机构180的结构示意图。如图10(a)所示,在一些实施例中,引导器驱动机构180可以包括至少一组双头螺杆模组181,双头螺杆模组181可以包括双头螺杆182、与双头
螺杆182螺纹连接的一对滑块183a和183b、以及与双头螺杆182连接的驱动单元(图中未示)。在一些实施例中,双头螺杆模组181可以包括分别滑动穿设在滑块183a和183b上的导杆184a和184b。至少一对第一结构骨1723a和1723b分别与滑块183a和183b固定连接。驱动单元驱动双头螺杆182旋转,驱动滑块183a和183b分别同步反向线性移动(例如沿导杆184a和184b),从而可以协同推拉第一结构骨1723a和1723b。通过至少一组双头螺杆模组181可以协同推拉多根第一结构骨1723,以实现远端连续体172或172’的弯转。
58.在一些实施例中,可引导生长器械100(或200)还可以包括引导器驱动机构。图10(b)示出根据本公开一些实施例的引导器驱动机构280的结构示意图。如图10(b)所示,引导器驱动机构280可以包括至少一组丝杆螺母模组281,丝杆螺母模组281可以包括螺纹连接的丝杆282和螺母283、滑动穿设在螺母283上的导杆284以及与丝杆282连接的驱动单元(图中未示)。至少一根第一结构骨1723或1723’与螺母283固定连接。驱动单元驱动丝杆282旋转,驱动螺母283线性移动(例如沿导杆284),从而推或拉第一结构骨1723或1723’。通过至少一组丝杆螺母模组281协同推拉多根第一结构骨1723或1723’,以实现远端连续体172的弯转。应当理解,本公开的引导器驱动机构包括但不限于上述实施例中的结构,只要能够实现推拉结构骨的驱动机构均不脱离本公开的范围。
59.在一些实施例中,如图11所示,引导器170还可以包括至少一个近端连续体173,包括近端基盘1731、近端止盘1732和多根第二结构骨1733。近端基盘1731和近端止盘1732间隔布置,近端基盘1731与远端基盘1721相邻,多根第二结构骨1733的近端与近端止盘1732紧固连接,多根第二结构骨1733的远端可以穿过近端基盘1731分别与多根第一结构骨1723的近端固定连接或一体成型。在一些实施例中,多根第二结构骨1733可以为镍钛合金丝、钢丝等等。
60.在一些实施例中,如图11所示,近端连续体173还可以包括设置在近端基盘1731和近端止盘1732之间的至少一个近端间隔盘1734,多根第二结构骨1733的近端依次穿过至少一个近端间隔盘1734和近端基盘1731。设置近端间隔盘1734可以加强多根第二结构骨1733在推拉过程中的稳定性。
61.在一些实施例中,如图11所示,引导器驱动机构380可以与近端止盘1732连接,用于驱动近端止盘1732运动翻转,从而实现推拉设置在近端止盘1732上的第二结构骨1733,通过第二结构骨1733推拉第一结构骨1723以带动远端连续体172在空间中沿着不同方向的弯转。在一些实施例中,第二结构骨1733与第一结构骨1723可以为固定连接或一体成型的同一根结构骨。在一些实施例中,多根第二结构骨1733近端与近端止盘1732紧固连接并穿过近端止盘1732,引导器驱动机构180(或280)可以与多根第二结构骨1733连接,通过协同推拉多根第二结构骨1733以带动远端连续体172在空间中沿着不同方向的弯转。
62.图12示出根据本公开一些实施例的引导器270的结构示意图。在一些实施例中,如图12所示,引导器270还可以包括至少一个近端连续体273,包括近端基盘2731、第一近端止盘2732a、第二近端止盘2732b和多根第二结构骨2733。近端基盘2731、第一近端止盘2732a和第二近端止盘2732b间隔布置,近端基盘2731与远端基盘2721相邻,多根第二结构骨2733的近端与第二近端止盘2732b紧固连接并且远端可以穿过第一近端止盘2732a与近端基盘2731紧固连接,多根第一结构骨2723的近端穿过近端基盘2731与第一近端止盘2732a紧固连接。
63.在一些实施例中,引导器驱动机构480可以与第二近端止盘2732b连接,用于驱动第二近端止盘2732b运动翻转,使近端基盘2731和第二近端止盘2732b产生错位,以使多根第二结构骨2733产生弯转,带动第一近端止盘2732a随之产生协同翻转,从而对端部固定在第一近端止盘2732a上的多根第一结构骨2723产生推拉,从而带动远端连续体272在空间中向不同方向的弯转。在一些实施例中,多根第二结构骨2733近端与第二近端止盘2732b紧固连接并穿过第二近端止盘2732b,与引导器驱动机构180(或280)连接,通过推拉第二结构骨2733以使第一近端止盘2732a产生协同翻转,从而推拉多根第一结构骨2723以带动远端连续体272在空间中向不同方向的弯转。
64.在一些实施例中,引导器可以包括:转弯构件和与转弯构件连接的驱动丝。图13示出根据本公开一些实施例的引导器370的转弯构件371的结构示意图。如图13所示,驱动丝373的远端与转弯构件371的远端紧固连接,驱动丝373可以在引导器驱动机构(例如引导器驱动机构180或280)的驱动下带动转弯构件371在至少一个自由度方向上弯转,从而驱动可生长管110(或者210、310、510)转向,以适应弯曲复杂的腔道115。
65.在一些实施例中,如图13所示,转弯构件371可以包括蛇骨结构372。图14示出根据本公开一些实施例的弯转单元3721的结构示意图。如图13和图14所示,蛇骨结构372可以包括多个首尾相接的中空竹节状弯转单元3721,相邻两个弯转单元3721之间可以通过相互嵌套的连接凹槽3722和连接凸起3723形成可径向弯转的运动副。驱动丝373可以贯穿设置在各弯转单元3721内或贯穿设置在各弯转单元3721的管壁中(可参考图13),驱动丝373的远端固定设置在蛇骨结构372的远端,引导器驱动机构推或拉驱动丝373,以带动蛇骨结构372弯转,从而驱动可生长管110弯转。在一些实施例中,驱动丝373的数量可以为多根,沿周向间隔分布,通过推、拉或协同推拉多根驱动丝373,以调整蛇骨结构372的弯转方向,以实现可生长管110向多个自由度方向的弯转。
66.在一些实施例中,转弯构件可以为柔性套管。图15示出根据本公开一些实施例的引导器470的转弯构件471的结构示意图,图16示出根据本公开一些实施例的狭缝单元473的结构示意图。如图15和图16所示,柔性套管472可以沿其延伸方向间隔设有多个狭缝单元473,各狭缝单元473可以包括至少一个沿柔性套管472周向延伸的狭缝4731。在一些实施例中,狭缝单元473可以包括多个狭缝4731,多个狭缝4731沿柔性套管472的轴向间隔设置,且多个狭缝4731依次沿柔性套管472的周向错位设置。驱动丝474可以贯穿设置在柔性套管472内或贯穿设置在柔性套管472的管壁中(可参考图15),驱动丝474的远端固定设置在柔性套管472的远端。引导器驱动机构(例如引导器驱动机构180或280)推拉驱动丝474,以带动柔性套管472弯转,从而驱动可生长管110弯转。在一些实施例中,驱动丝474的数量可以为多根,沿周向间隔分布,通过推、拉或协同推拉多根驱动丝474,以调整柔性套管472的弯转方向。在一些实施例中,柔性套管472可绕轴向旋转,从而可以调整柔性套管472的弯转方向,以实现可生长管110向多个自由度方向的弯转。
67.图17示出根据本公开一些实施例的引导器570的转弯构件571的纵向剖视图。如图17所示,在一些实施例中,转弯构件571还可以包括波纹管572,驱动丝573可以贯穿设置在波纹管572内或贯穿设置在波纹管572的管壁中(可参考图17),驱动丝573的远端固定设置在波纹管572的远端,引导器驱动机构(例如引导器驱动机构180或280)推或拉驱动丝573,以带动波纹管572弯转,从而驱动可生长管110(或210、310、510)弯转。应当理解,转弯构件
包括但不限于上述结构,任何可以转弯的结构均属于本公开的保护范围。
68.可引导生长器械100(或200)可以包括引导器170-570中的任一个。在一些实施例中,如图7所示,引导器170(或270-570)还可以包括医疗仪器171,医疗仪器171可以固定设置在引导器170的远端,包括例如内窥镜、末端手术执行器、超声探头、探针等。在一些实施例中,医疗仪器171可以设置在引导器170的内部通道中,例如提供药物的给药器等。
69.本公开还提供一种手术机器人系统(图中未示),可以包括系统控制器和上述的可引导生长器械100(或200),系统控制器被配置成可以控制可引导生长器械的运动,例如控制可生长管100的生长或回撤、或者控制引导器170的前进、转向或回撤等。由于可引导生长器械具有较好的柔性,可以实时生长延伸,从而可以很好地适应弯曲复杂的腔道,可广泛应用于各种腔道的介入诊断和治疗。
70.本公开还公开了以下:
71.1.一种可引导生长器械,包括:
72.可生长管,所述可生长管包括内层、外层以及位于所述内层和所述外层之间的流体腔,所述流体腔用于容纳流体;
73.所述可生长管包括位于远端处的可翻展区域,所述内层和所述外层在所述可翻展区域相连并且可翻展;
74.引导器,设置在由所述可生长管的内层包围的通道中,所述引导器的远端可弯曲以带动所述可生长管弯转。
75.2.根据第1项所述的可引导生长器械,所述外层近端的径向尺寸大于或等于所述外层远端的径向尺寸。
76.3.根据第1项所述的可引导生长器械,所述外层的径向尺寸从近端向远端延伸方向基本不变、逐渐减小或者阶跃式减小。
77.4.根据第1项所述的可引导生长器械,所述内层的径向尺寸从近端向远端延伸方向保持不变或逐渐减小。
78.5.根据第1项所述的可引导生长器械,所述引导器包括:至少一个远端连续体,包括远端基盘、远端止盘和多根第一结构骨,所述远端基盘和所述远端止盘间隔布置,所述多根所述第一结构骨的远端与所述远端止盘紧固连接,所述多根所述第一结构骨的近端穿过所述远端基盘。
79.6.根据第5项所述的可引导生长器械,所述引导器还包括:
80.至少一个近端连续体,包括近端基盘、近端止盘和多根第二结构骨,所述近端基盘和所述近端止盘间隔布置,所述近端基盘与所述远端基盘相邻,所述多根第二结构骨的近端与所述近端止盘紧固连接,所述多根所述第二结构骨的远端穿过所述近端基盘分别与所述多根第一结构骨的近端固定连接或一体成型。
81.7.根据第5项所述的可引导生长器械,所述引导器还包括:
82.至少一个近端连续体,包括近端基盘、第一近端止盘、第二近端止盘和多根第二结构骨,所述近端基盘、所述第一近端止盘和所述第二近端止盘间隔布置,所述近端基盘与所述远端基盘相邻,所述多根第二结构骨的近端与第二近端止盘固定连接,所述多根第二结构骨的远端穿过所述第一近端止盘与所述近端基盘紧固连接;
83.所述多根第一结构骨的近端穿过近端基盘与所述第一近端止盘紧固连接。
84.8.根据第5项所述的可引导生长器械,还包括引导器驱动机构,所述引导器驱动机构与所述多根第一结构骨连接,通过推拉所述第一结构骨以带动所述远端连续体在空间中沿着不同方向的弯转。
85.9.根据第6或7项所述的可引导生长器械,还包括引导器驱动机构,所述引导器驱动机构与最近端的近端止盘连接,用于驱动所述近端止盘运动翻展,从而推拉所述第二结构骨以带动所述远端连续体在空间中沿着不同方向的弯转;或者
86.所述引导器驱动机构与所述多根第二结构骨连接,通过推拉所述第二结构骨以带动所述远端连续体在空间中沿着不同方向的弯转。
87.10.根据第1项所述的可引导生长器械,所述引导器包括:转弯构件和设置于所述转弯构件内的驱动丝,所述驱动丝的远端与所述转弯构件的远端紧固连接,所述驱动丝用于在引导器驱动机构的驱动下带动所述转弯构件在至少一个自由度方向上弯转。
88.11.根据第10项所述的可引导生长器械,所述转弯构件为蛇骨结构,所述蛇骨结构包括多个首尾相接的中空竹节状弯转单元,相邻两个所述弯转单元之间通过相互嵌套的连接凹槽和连接凸起形成可径向弯转的运动副。
89.12.根据第10项所述的可引导生长器械,所述转弯构件为柔性套管,所述柔性套管沿其延伸方向间隔设有多个狭缝单元,各所述狭缝单元包括至少一个沿所述柔性套管周向延伸的狭缝。
90.13.根据第10项所述的可引导生长器械,所述转弯构件为波纹管,所述驱动丝可以贯穿设置在所述波纹管内或贯穿设置在所述波纹管的波纹管壁中。
91.14.根据第1-8项中任一项所述的可引导生长器械,还包括:管驱动机构,所述管驱动机构与所述可生长管连接,用于驱动所述可生长管的所述外层或所述内层运动。
92.15.根据第14项所述的可引导生长器械,所述管驱动机构包括:驱动单元、移动杆以及与所述驱动单元和所述移动杆连接的传动单元,所述移动杆与所述可生长管的内层或外层密封连接,所述传动单元用于将所述驱动单元的旋转运动转化为线性运动,以驱动所述移动杆带动所述可生长管生长或回撤。
93.16.根据第15项所述的可引导生长器械,所述传动单元包括:并列设置的第一和第二滚轮;
94.所述移动杆的近端设置在所述第一和第二滚轮之间,并与所述第一和第二滚轮抵接,所述移动杆的远端与所述可生长管的内层或外层密封连接;
95.所述驱动单元分别与所述第一和第二滚轮连接,用于驱动所述第一和第二滚轮同步等速反向旋转以带动所述移动杆线性移动。
96.17.根据第15项所述的可引导生长器械,所述传动单元包括:丝杆滑块模组,包括通过螺纹连接的丝杆和滑块;
97.所述移动杆的近端与所述滑块固定连接,所述移动杆的远端与所述可生长管的内层或外层密封连接;以及
98.所述驱动单元与所述丝杆连接,用于驱动所述丝杆旋转以带动所述移动杆线性移动。
99.18.根据第14项所述的可引导生长器械,还包括流体控制器;
100.所述流体控制器用于向所述流体加压或减压,以驱动所述流体填充所述可翻展区
域的所述流体腔或驱动所述流体从所述流体腔回撤。
101.19.根据第1-8项中任一项所述的可引导生长器械,所述流体为液态流体或者气态流体。
102.20.根据第1-8项中任一项所述的可引导生长器械,所述可生长管由柔性材料制成。
103.21.根据第1-8项中任一项所述的可引导生长器械,所述可生长管的截面呈圆形或者椭圆形。
104.22.根据第1-8项中任一项所述的可引导生长器械,所述引导器还包括医疗仪器,所述医疗仪器固定设置在所述引导器的远端或者设置在所述引导器的内部通道中。
105.23.根据第22项所述的可引导生长器械,所述医疗仪器包括超声探头、探针、药物胶囊或末端手术执行器。
106.24.一种手术机器人系统,包括系统控制器和如第1-23项中任一项所述的可引导生长器械,所述系统控制器被配置成控制所述可引导生长器械的运动。
107.注意,上述仅为本公开的示例性实施例及所运用技术原理。本领域技术人员会理解,本公开不限于这里的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本公开的保护范围。因此,虽然通过以上实施例对本公开进行了较为详细的说明,但是本公开不仅仅限于以上实施例,在不脱离本公开构思的情况下,还可以包括更多其他等效实施例,而本公开的范围由所附的权利要求范围决定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。