技术特征:
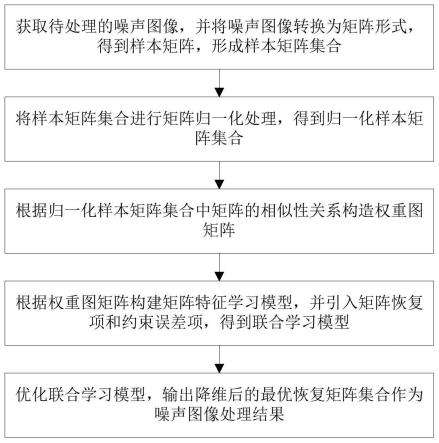
1.一种基于鲁棒性矩阵特征学习的噪声图像处理方法,其特征在于,包括以下步骤:s1:获取待处理的噪声图像,并将噪声图像转换为矩阵形式,得到样本矩阵,形成样本矩阵集合;s2:将样本矩阵集合进行矩阵归一化处理,得到归一化样本矩阵集合;s3:根据归一化样本矩阵集合中矩阵的相似性关系构造权重图矩阵;s4:根据权重图矩阵构建矩阵特征学习模型,并引入矩阵恢复项和约束误差项,得到联合学习模型;s5:优化联合学习模型,输出降维后的最优恢复矩阵集合作为噪声图像处理结果。2.根据权利要求1所述的一种基于鲁棒性矩阵特征学习的噪声图像处理方法,其特征在于,在步骤s1中,通过以下方式将噪声图像转换为矩阵形式:根据噪声图像中每个像素点的位置分别对应一个矩阵元素来构造矩阵,并根据像素点的颜色对相应的矩阵元素进行赋值。3.根据权利要求1所述的一种基于鲁棒性矩阵特征学习的噪声图像处理方法,其特征在于,步骤s2中矩阵归一化处理具体为:对样本矩阵集合x
′
=[(x1)
′
,(x2)
′
,
…
(x
i
)
′
,
…
,(x
n
)
′
]中的n个样本矩阵分别除以自身的f范数,得到归一化样本矩阵集合x=[x1,x2,
…
x
i
,
…
,x
n
]即:其中,(x
i
)
′
表示第i个样本矩阵,样本矩阵的维度为m
×
l,‖(x
i
)
′
‖
)
表示(x
i
)
′
的f范数,x
i
表示第i个归一化样本矩阵。4.根据权利要求1所述的一种基于鲁棒性矩阵特征学习的噪声图像处理方法,其特征在于,通过以下方式对权重图矩阵中的元素进行赋值:其中,s
ij
表示权重图矩阵s的第i行第j列的元素,权重图矩阵s中每个元素均表示两两归一化样本矩阵的相似性关系;a=[a1,a2,
…
a
i
,
…
,a
n
]表示恢复矩阵集合,a
i
表示归一化样本矩阵x
i
的恢复矩阵;n
k
(a
j
)表示第j个恢复矩阵a
j
的k近邻集合;表示两矩阵间的距离;t表示高斯核函数的带宽;归一化样本矩阵集合x与恢复矩阵集合a存在以下关系:x=a e其中,e=[e1,e2,...,e
i
,...,e
n
]表示误差矩阵集合,e
i
表示归一化样本矩阵x
i
和恢复矩阵a
i
间的偏差。5.根据权利要求1所述的一种基于鲁棒性矩阵特征学习的噪声图像处理方法,其特征在于,通过以下方式对权重图矩阵中的元素进行赋值:
其中,s
ij
表示权重图矩阵s的第i行第j列的元素,权重图矩阵s中每个元素均表示两两归一化样本矩阵的相似性关系,a=[a1,a2,
…
a
i
,
…
,a
n
]表示恢复矩阵集合,a
i
表示归一化样本矩阵x
i
的恢复矩阵,n
k
(a
j
)表示第j个恢复矩阵a
j
的k近邻集合,t表示高斯核函数的带宽;归一化样本矩阵集合x与恢复矩阵集合a存在以下关系:x=a e其中,e=[e1,e2,...,e
i
,...,e
n
]表示误差矩阵集合,e
i
表示归一化样本矩阵x
i
和恢复矩阵a
i
间的偏差。6.根据权利要求1所述的一种基于鲁棒性矩阵特征学习的噪声图像处理方法,其特征在于,在步骤s4中,所述矩阵特征学习模型的数学公式为:s.t.p
t
ama
t
p=i其中,p是维度为m
×
d的线性投影矩阵,d是设定的低维空间的维度,d<m;(
·
)
t
表示矩阵的转置;表示第i个恢复矩阵a
i
和第j个恢复矩阵a
j
间的距离信息,p
t
a表示恢复矩阵集合a降维后得到的集合,m是一个对角线矩阵,i表示单位矩阵;为了方便求解,将矩阵特征学习模型的数学公式推导为:s.t.p
t
ama
t
p=itr(
·
)表示矩阵的迹,拉普拉斯矩阵l=m-s。7.根据权利要求6所述的一种基于鲁棒性矩阵特征学习的噪声图像处理方法,其特征在于,采用||p
t
a
i-p
t
a
j
||
2,1
或||p
t
a
i-p
t
a
j
||
*
来计算矩阵的距离,其中,表示矩阵的f范数的平方,||
·
||
2,1
表示矩阵的l2,1范数,||
·
||
*
表示矩阵的核范数。8.根据权利要求1所述的一种基于鲁棒性矩阵特征学习的噪声图像处理方法,其特征在于,引入的矩阵恢复项和约束误差项的数学公式为:s.t.x=a e其中,φ(e)是对误差矩阵集合e的先验约束,如||e||1、||e||
2,1
、||e||
*
,||
·
||1表示矩阵的l1范数,||
·
||
2,1
表示矩阵的l2,1范数,||
·
||
*
表示矩阵的核范数;α和β分别表示不同的范数项权重平衡变量,x表示归一化样本矩阵集合,a表示恢复矩阵集合。9.根据权利要求1所述的一种基于鲁棒性矩阵特征学习的噪声图像处理方法,其特征在于,所述联合学习模型的数学公式如下:
s.t.x=a e,p
t
ama
t
p=i其中,p是维度为m
×
d的线性投影矩阵,表示第i个恢复矩阵a
i
和第j个恢复矩阵a
j
间的距离信息,p
t
a表示恢复矩阵集合a降维后得到的集合,s
ij
表示权重图矩阵s的第i行第j列的元素,α和β分别表示不同的范数项权重平衡变量,x表示归一化样本矩阵集合,||
·
||
*
表示矩阵的核范数,φ(e)是对误差矩阵集合e的先验约束,m是一个对角线矩阵,i表示单位矩阵。10.根据权利要求9所述的一种基于鲁棒性矩阵特征学习的噪声图像处理方法,其特征在于,步骤s5具体包括以下步骤:s5.1:根据增广拉格朗日乘子法,将所述联合学习模型重新表达:s5.1:根据增广拉格朗日乘子法,将所述联合学习模型重新表达:s.t.p
t
ama
t
p=i其中,q和b分别表示不同的拉格朗日乘子,h表示中间变量,μ表示步长系数,表示矩阵的f范数的平方;s5.2:固定步骤s5.1的公式中与e无关的变量得到:根据φ(e)具体的先验约束求出e;固定步骤s5.1的公式中与a无关的变量得到:利用矩阵微分直接对a求导;固定步骤s5.1的公式中与h无关的变量得到:利用奇异值阈值分解求出h;固定步骤s5.1的公式中与p无关的变量得到:s.t.p
t
ama
t
p=i
利用广义特征值分解求出p;s5.3:更新模型参数q、b、μ:其中,ρ用于调整迭代优化过程的收敛速度,1<ρ<2;s5.4:判断优化联合学习模型相邻两次输出值间的差值是否小于预设的阈值,若是,则满足收敛条件,得到最优恢复矩阵集合,将最优恢复矩阵集合降维后输出作为噪声图像处理结果;若否,则返回步骤s5.2迭代更新优化联合学习模型。
技术总结
本发明提供一种基于鲁棒性矩阵特征学习的噪声图像处理方法,包括以下步骤:S1:获取待处理的噪声图像,并将噪声图像转换为矩阵形式,得到样本矩阵,形成样本矩阵集合;S2:将样本矩阵集合进行矩阵归一化处理,得到归一化样本矩阵集合;S3:根据归一化样本矩阵集合中矩阵的相似性关系构造权重图矩阵;S4:根据权重图矩阵构建矩阵特征学习模型,并引入矩阵恢复项和约束误差项,得到联合学习模型;S5:优化联合学习模型,输出降维后的最优恢复矩阵集合作为噪声图像处理结果。本发明提供一种基于鲁棒性矩阵特征学习的噪声图像处理方法,实现了对噪声图像的降噪降维,解决了在实际场景获得的图像会存在噪声信息,难以得到高质量的图像数据的问题。据的问题。据的问题。
技术研发人员:陈庭坚 袁浩亮 艾怡豪
受保护的技术使用者:广东工业大学
技术研发日:2022.06.15
技术公布日:2022/8/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。