grapes-reps区域集合预报方法及系统
技术领域
1.本发明属于数值预报技术领域,尤其涉及grapes-reps区域集合预报方法及系统。
背景技术:
2.目前,数值预报是我国天气预报,尤其是灾害性强天气预报的一个有效工具,但由于单一数值预报存在不确定性,集合预报便成为了数值预报领域的一个重要发展方向。然而我国现有的集合预报系统由于物理扰动方案和侧边界扰动方案不够完善、模式雷达回波诊断量预报不够准确等原因,存在系统发散度不够、概率预报技巧不够高等问题,导致其不足以完全满足系统业务化应用需求,从而难以提供有力的防害减灾气象预报服务技术支撑。
3.grapes(global and regional assimilation and prediction enhanced system)是我国自主开发的新一代数值模式,其中包含全球和区域两个版本。近年来,高分辨率数值模式虽对中尺度天气系统具有一定的预报能力,但由于模式初始场误差和离散化模式误差等原因引发的预报不确定性,当具体到定点、定时、定量方面,数值模式的可用性较低。中小尺度强天气具有突发性和转折性,其预报不确定性因素难以把握,如何基于区域模式,通过合适的扰动方法来构建有效的区域集合预报,以描述中尺度灾害天气的不确定性,是目前的研究热点和难点。
4.由于中小尺度和热带气旋的动力机制不同于中高纬度的大尺度天气系统,相应的集合预报理论和方法还不完备。在国外,有学者将从中期集合预报中发展出来的bgm、svs等方法应用于中尺度集合预报实验,也有学者专门针对中尺度预报特点发展初值扰动方法。在我国,中国气象科学研究院数值预报研究中心采用了增长模繁殖法建立了多初值多物理区域集合预报系统,同时也有研究开发与全球集合预报系统数据耦合的grapes-meso区域集合预报技术和试验系统,发展集合变换卡尔曼滤波(etkf,ensemble transform kalman filter)初值扰动技术和grapes模式随机扰动技术,并建立grapes-区域集合预报试验系统。
5.现有技术多采用etkf初值扰动方法以及多物理过程组合模式扰动方法构建区域集合预报试验方法,但计算中使用的是模拟观测资料,并未使用真实观测资料;此外,仅采用初值扰动与物理过程扰动相结合,构建的预报系统离散度不足。现有技术还使用随机物理过程倾向项扰动方案sppt,通过随机扰动净倾向来表示模式不确定性,从而构建集合预报系统,但系统发散度不够,不足以完全满足系统业务化应用需求。现有技术还使用slaf方法(利用尺度化因子σ缩放过去时刻预报场与分析场的差值,将其叠加到测边界上)来构建区域集合预报系统的测边界扰动方案。但是,slaf方法中,时间距离较大的两个时刻的预报误差偏大,导致离散度结构不合理,从而在预报过程中,不合理的测边界扰动很快由模式过滤,导致方案的预报技巧偏差过大。因此,亟需一种新的区域集合预报方法,以弥补现有技术的缺陷。
6.通过上述分析,现有技术存在的问题及缺陷为:
7.(1)现有的集合预报系统由于物理扰动方案和侧边界扰动方案不够完善、模式雷达回波诊断量预报不够准确等原因,存在系统发散度不够、概率预报技巧不够高等问题,导致其不足以完全满足系统业务化应用需求,从而难以提供有力的防害减灾气象预报服务技术支撑。
8.(2)由于模式初始场误差和离散化模式误差等原因引发的预报不确定性,当具体到定点、定时、定量方面,高分辨率数值模式的可用性较低;中小尺度强天气的预报不确定性因素难以把握,如何基于区域模式,通过合适的扰动方法来构建有效的区域集合预报,以描述中尺度灾害天气的不确定性,是目前的研究热点和难点。
9.(3)现有采用etkf初值扰动方法以及多物理过程组合模式扰动方法构建区域集合预报试验方法,计算中使用的是模拟观测资料,并未使用真实观测资料;仅采用初值扰动与物理过程扰动相结合,构建的预报系统离散度不足。
10.(4)现有使用随机物理过程倾向项扰动方案sppt,通过随机扰动净倾向来表示模式不确定性,从而构建集合预报系统,但系统发散度不够,不足以完全满足系统业务化应用需求。
11.(5)现有技术还使用slaf方法(利用尺度化因子σ缩放过去时刻预报场与分析场的差值,将其叠加到测边界上)来构建区域集合预报系统的测边界扰动方案中,时间距离较大的两个时刻的预报误差偏大,导致离散度结构不合理,从而在预报过程中,不合理的测边界扰动很快由模式过滤,导致方案的预报技巧偏差过大。
12.解决以上问题及缺陷的难度为:
13.研究需要花费大量时间与资金投入,且实验需要大量真实数据支持,一般企业或高校难以满足系统构建及开发需求。
14.预报系统的业务化及推广需要权威性气象预报服务机构支持,地方气象台缺少财力物力,也难以进行全国性推广。
15.解决以上问题及缺陷的意义为:
16.保障系统发散度,提高概率预报技巧,减少预报偏差,使其能满足系统业务化应用需求,并将业务化系统推广到全国各级气象台,从而提供有力的防害减灾气象预报服务技术支撑。
技术实现要素:
17.针对现有技术存在的问题,本发明提供了grapes-reps区域集合预报方法及系统。
18.本发明是这样实现的,grapes-reps区域集合预报方法,包括:
19.建立0.1度水平分辨率grapes-reps的初值扰动etkf计算方案,改进集合变换卡尔曼滤波变换矩阵权重模计算变量,优化观测误差协方差矩阵和放大因子计算方案,实现代表初值不确定性的技术由etkf msb更新为etkf技术;模式不确定性由多物理过程 sppt更新为单一物理过程 sppt,改进集合预报成员降水等同性和降水概率预报技巧;
20.侧边界扰动不确定性由t639更新为grapes-geps全球集合预报,设计适合grapes-geps变量特点的侧边界扰动计算方案;集合预报成员增加台风涡旋条件重定位方案,集合预报成员增加云分析同化技术;建立ecflow的grapes-reps区域集合预报实时监控与调度流程,实现grapes-reps区域集合预报作业调度;优化改进统一后处理系统,改进概率预报
产品。
21.进一步,所述概率预报产品,包括风、温、湿、位势高度、降水多要素、多层次的集合平均、离散度、面条图、强对流诊断产品、台风应急服务产品。
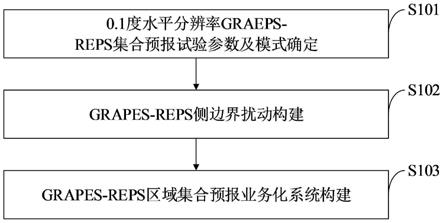
22.进一步,所述grapes-reps区域集合预报方法包括以下步骤:
23.步骤一,0.1度水平分辨率graeps-reps集合预报试验参数及模式确定;
24.步骤二,grapes-reps侧边界扰动构建;
25.步骤三,grapes-reps区域集合预报业务化系统构建。
26.进一步,步骤一中,所述0.1度水平分辨率graeps-reps集合预报试验参数及模式确定,包括:
27.试验模式采用grapes-meso v4.0,垂直坐标采用地形追随高度坐标,垂直层次为51层,集合预报成员数为14个集合扰动成员,加上控制预报共15个集合成员,集合预报成员物理过程略有差异,控制预报初值采用grapes-3dvar系统生成的分析场,背景场和侧边界条件由数值预报中心t639全球集合预报系统提供;etkf初值扰动方法采用12h集合扰动循环计算方案,即将集合预报系统12h短期预报场构成的预报扰动更新为当前时刻的分析扰动,计算投影矩阵e采用的变量为grapes-meso模式面纬向风u和经向风v,采用的垂直层次为11层;观测资料采用模拟观测资料,即将t639全球模式分析场插值到观测站点上,模拟观测站点选择参考真实观测站分布。
28.观测站数为1100个,扰动分析场由etkf方法计算的14个扰动场与控制预报初值相加获得;试验预报时效为72h,预报范围覆盖整个中国区域15
°
~55
°
n,70
°
~140
°
e;试验时段为2015年6月1日12:00至6月15日12:00,协调世界时,其中6月1日至10日为etkf分析扰动α参数计算适应调整期。
29.进一步,步骤二中,所述grapes-reps侧边界扰动构建,包括:
30.设计基于grapes-geps全球集合预报系统的大尺度背景驱动数据,提取grapes-reps区域集合预报系统所需侧边界条件的扰动值,并与控制预报侧边界条件相加形成扰动成员预报所需的扰动侧边界条件,包括:
31.(1)基于grpaes-meso-3km的全球模式背景场数据,利用动力降尺度方法产生grapes-reps控制预报模式的初值和测边界条件bdy_ctl
reps
。
32.(2)从grapes-geps全球集合预报中选择控制预报和第1至14个集合成员的背景场资料,采用grapes-geps集合预报业务编号01~14的扰动成员和编号00的控制预报背景场资料,利用动力降尺度方法产生01~14个集合成员侧边界条件,并减去编号为00的控制预报产生的侧边界,获得第i个集合预报成员的侧边界扰动值bdy_perti:
[0033][0034]
其中,i为集合预报成员号。
[0035]
(3)将控制预报侧边界条件bdy_ctl
reps
与上式计算出的侧边界扰动量相加,生成grapes-reps侧边界扰动,如下式所示:
[0036][0037]
进一步,步骤三中,所述grapes-reps区域集合预报业务化系统构建,包括:
[0038]
在中国气象局曙光pi-sugon高性能计算机上,研发并应用区域集合预报系统,基
于ecflow技术构建系统运行流程的调度,通过并发调度和并发数控制机制,建立grapes_reps区域集合预报系统。
[0039]
其中,所述grapes-reps区域集合预报系统参数,包括:
[0040]
①
当控制预报模式为水平分辨率/垂直层次时,grapes-meso4.3为0.1度,50层;
[0041]
②
当控制预报模式为控制预报初值时,grapes-meso4.3同grapes-3km初值生成方法;
[0042]
③
当控制预报模式为物理过程时,grapes-meso4.3同grapes-3km kf积云对流参数化过程;
[0043]
④
当控制预报模式为积分步长时,grapes-meso4.3为60秒;
[0044]
⑤
当控制预报模式为初值不确定性时,grapes-meso4.3为集合变换卡尔曼滤波方法;
[0045]
⑥
当控制预报模式为模式不确定性时,grapes-meso4.3为随机物理过程倾向项扰动法;
[0046]
⑦
当控制预报模式为测边界不确定性时,grapes-meso4.3为grapes-geps全球集合预报;
[0047]
⑧
当控制预报模式为台风定位不确定性时,grapes-meso4.3为台风涡旋条件重定位方法;
[0048]
⑨
当控制预报模式为集合成员数时,grapes-meso4.3为15;
[0049]
⑩
当控制预报模式为预报时效时,grapes-meso4.3为84小时,00、12时次;6小时,06、18时次;
[0050]
当控制预报模式为模式产品输出频率时,grapes-meso4.3为1小时;
[0051]
当控制预报模式为集合预报后处理时,grapes-meso4.3为grib2数据、常规天气预报产品、应急服务数据。
[0052]
本发明的另一目的在于提供一种应用所述的grapes-reps区域集合预报方法的grapes-reps区域集合预报系统,所述grapes-reps区域集合预报系统包括:
[0053]
背景资料预处理模块,用于进行grapes-reps背景场资料处理;grapes-reps的背景场资料处理分为控制预报背景场资料处理和基于grapes-geps的扰动成员背景场资料处理;其中,所述控制预报背景场资料处理使用grapes-3km同样的全球模式资料,即全球0.5
°
grib2格式资料,处理得到初步的控制预报初始场和侧边界条件,为控制预报台风涡旋重定位和侧边界扰动构建提供输入数据;所述扰动成员背景场资料处理,基于grapes-geps提供的集合背景场资料,即全球集合预报0.5
°
grib2格式资料,处理得到初步的15组扰动成员预报初始场和侧边界条件,为侧边界扰动构建提供输入数据;其中,所述扰动成员包括geps控制预报。
[0054]
侧边界扰动构建模块,用于进行控制预报和集合预报成员侧边界扰动构建;基于grapes-meso-3km的全球模式背景场数据产生grapes-reps控制预报侧边界条件,利用grapes-geps全球集合预报背景场资料产生集合扰动成员侧边界扰动量,并叠加到控制预报侧边界条件上,获得集合预报扰动成员侧边界。
[0055]
初值扰动模块,用于进行集合卡尔曼滤波变换etkf初值扰动;使用grapes-reps区域集合预报前一个时次的6h预报场,当前预报时次的模拟观测数据,模拟观测站点信息以
及当前预报时次的grapes-reps控制预报的模式初值,构建分析扰动场,生成14个扰动成员的扰动初始场,为扰动成员台风涡旋重定位提供输入数据。
[0056]
台风涡旋重定位模块,用于进行台风涡旋条件重定位;grapes-reps的台风涡旋重定位方案通过检索台风报文、计算模式分析场台风涡旋中心和观测台风涡旋中心的距离是否大于0.15度阈值,对预报初始场进行修正;控制预报的台风涡旋重定位方案在控制预报背景场资料处理之后执行,为控制预报模式积分提供初始场,并提供更为合理的控制预报模式初值给集合卡尔曼滤波初值扰动模块;扰动成员的台风涡旋重定位方案则设计在集合卡尔曼滤波初值扰动之后,在etkf提供的合理扰动初始场的基础上,对预报初始场进行修正,为扰动成员模式积分提供更合理的扰动初始场。
[0057]
云分析模块,用于进行集合预报成员云分析,生成云水资料,为控制预报和14个扰动成员的模式积分提供云分析数据;综合各国多普勒天气雷达三维格点拼图资料、风云静止气象卫星亮温和模式背景场资料信息,根据云热力动力学原理及观测试验经验关系等,对云的信息进行分析,应用到模式预报前期改善模式降水预报效果。
[0058]
预报积分控制模块,用于利用0.1
°
分辨率grapes-meso v4.3模式、前面步骤得到的控制预报初始场和侧边界条件进行84hr积分,得到控制预报积分结果;输入数据为0.1
°
控制预报初值和侧边界条件,输出为84hr预报时效内逐1hr预报结果,输出结果存储于曙光高性能计算机的文件系统中。
[0059]
扰动成员模式积分模块,用于进行模式扰动参数生成及14个扰动成员模式积分;生成14个扰动成员sppt模式扰动方案所需的随机种子、扰动量大小、随机扰动截断波数、失相关时间系数,利用加入grapes-meso模式中的模式扰动sppt模式运行程序,完成14个扰动成员的84hr积分,得到14个扰动成员预报结果;输入数据为14个扰动成员初始场、随机种子、扰动量大小、随机扰动截断波数、失相关时间系数在内的参数,输出为84hr预报时效内逐1hr预报结果,输出结果存储于曙光高性能计算机的文件系统中。
[0060]
积分数据处理模块,用于进行集合预报积分数据统一后处理;通过控制文件规定需要输出的要素和层次,模式面的模式变量输出经过统一后处理模块生成grib2格式的输出结果,其中包含等压面变量、模式面变量和全部诊断变量,改处理过程在某一诗词集合预报结果生成后立即开启,为产品后处理提供及时的grib2数据。
[0061]
集合预报产品后处理模块,用于利用统一后处理得到的grib2格式集合预报结果,生成业务集合预报产品;常规集合预报产品模块将生成集合预报箱线图数据、台风路径集合预报数据以及micaps格式数据;设计系统合理的启动时间节点,实现自动化业务运行;进行集合预报产品传送流程设计,实现集合预报产品传送至中央气象台;其中,所述产品内容包括:集合平均、集合离散度、集合最大/最小值、集合分位数、众数和概率。
[0062]
本发明的另一目的在于提供一种计算机设备,所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如下步骤:
[0063]
建立0.1度水平分辨率grapes-reps的初值扰动etkf计算方案,改进集合变换卡尔曼滤波变换矩阵权重模计算变量,优化观测误差协方差矩阵和放大因子计算方案,实现代表初值不确定性的技术由etkf msb更新为etkf技术;模式不确定性由多物理过程 sppt更新为单一物理过程 sppt,改进集合预报成员降水等同性和降水概率预报技巧;
reps区域集合预报作业调度。
[0076]
(7)优化改进统一后处理系统,改进概率预报产品,包括风、温、湿、位势高度、降水等多要素、多层次的集合平均、离散度、面条图、强对流诊断产品、台风应急服务产品。
附图说明
[0077]
为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例中所需要使用的附图做简单的介绍,显而易见地,下面所描述的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下还可以根据这些附图获得其他的附图。
[0078]
图1是本发明实施例提供的grapes-reps区域集合预报方法流程图。
[0079]
图2是本发明实施例提供的grapes-reps区域集合预报系统结构框图;
[0080]
图中:1、背景资料预处理模块;2、侧边界扰动构建模块;3、台风涡旋重定位模块;4、云分析模块;5、预报积分控制模块;6、扰动成员模式积分模块;7、积分数据处理模块;8、集合预报产品后处理模块。
[0081]
图3是本发明实施例提供的grapes-reps模式的etkf初值扰动计算方案观测站点分布示意图。
[0082]
图4是本发明实施例提供的grapes-reps侧边界扰动方案流程图。
[0083]
图5是本发明实施例提供的grapes-reps区域集合预报系统运行流程图。
[0084]
图6是本发明实施例提供的2015年6月11日00:00至15日12:00(每日两次,共计10次)平均的预报和分析扰动协方差矩阵特征值分布示意图。
[0085]
图6(a)是本发明实施例提供的10km水平分辨率试验(简称10km试验)示意图;其中,深色:预报扰动;浅色:分析扰动。
[0086]
图6(b)是本发明实施例提供的15km水平分辨率试验(简称15km试验)示意图;其中,深色:预报扰动;浅色:分析扰动。
[0087]
图7是本发明实施例提供的2015年6月1日12:00至15日12:00(每日两次,共计10次)的0.1度试验与0.15度试验的模式初值扰动量示意图。
[0088]
图7(a)是本发明实施例提供的参数值α的逐日演变示意图。
[0089]
图7(b)是本发明实施例提供的放大因子π的逐日演变示意图。
具体实施方式
[0090]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0091]
针对现有技术存在的问题,本发明提供了grapes-reps区域集合预报方法及系统,下面结合附图对本发明作详细的描述。
[0092]
如图1所示,本发明实施例提供的grapes-reps区域集合预报方法包括以下步骤:
[0093]
s101,0.1度水平分辨率graeps-reps集合预报试验参数及模式确定;
[0094]
s102,grapes-reps侧边界扰动构建;
[0095]
s103,grapes-reps区域集合预报业务化系统构建。
[0096]
如图2所示,本发明实施例提供的grapes-reps区域集合预报系统包括:
[0097]
背景资料预处理模块1,用于进行grapes-reps背景场资料处理;
[0098]
侧边界扰动构建模块2,用于进行控制预报和集合预报成员侧边界扰动构建;
[0099]
台风涡旋重定位模块3,用于进行台风涡旋条件重定位;
[0100]
云分析模块4,用于进行集合预报成员云分析,生成云水资料,为控制预报和14个扰动成员的模式积分提供云分析数据;
[0101]
预报积分控制模块5,用于利用0.1
°
分辨率grapes-meso v4.3模式、前面步骤得到的控制预报初始场和侧边界条件进行84hr积分;
[0102]
扰动成员模式积分模块6,用于进行模式扰动参数生成及14个扰动成员模式积分;
[0103]
积分数据处理模块7,用于进行集合预报积分数据统一后处理;
[0104]
集合预报产品后处理模块8,用于利用统一后处理得到的grib2格式集合预报结果,生成业务集合预报产品。
[0105]
下面结合具体实施例对本发明的技术方案作进一步描述。
[0106]
本发明的技术方案为:
[0107]
(1)建立0.1度水平分辨率grapes-reps的初值扰动etkf计算方案,改进集合变换卡尔曼滤波变换矩阵权重模计算变量,优化观测误差协方差矩阵和放大因子计算方案,增加计算稳定性,实现代表初值不确定性的技术由etkf msb更新为etkf技术;
[0108]
(2)模式不确定性由多物理过程 sppt更新为单一物理过程 sppt,改进集合预报成员降水等同性和降水概率预报技巧。
[0109]
(3)侧边界扰动不确定性由t639更新为grapes-geps全球集合预报,设计适合grapes-geps变量特点的侧边界扰动计算方案。
[0110]
(4)集合预报成员增加台风涡旋条件重定位方案,提升台风中心定位初始不确定性的合理性。
[0111]
(5)集合预报成员增加云分析同化技术,提升初值水汽分析质量和降水预报质量。
[0112]
(6)建立ecflow的grapes-reps区域集合预报实时监控与调度流程,实现grapes-reps区域集合预报作业调度。
[0113]
(7)优化改进统一后处理系统,改进概率预报产品,包括风、温、湿、位势高度、降水等多要素、多层次的集合平均、离散度、面条图、强对流诊断产品、台风应急服务产品。
[0114]
下面详细阐述技术方案的原理并配合附图进行说明。
[0115]
1.0.1度水平分辨率graeps-reps集合预报试验参数及模式
[0116]
试验模式采用grapes-meso v4.0,垂直坐标采用地形追随高度坐标,垂直层次为51层,集合预报成员数为14个集合扰动成员,加上控制预报共15个集合成员,集合预报成员物理过程略有差异,控制预报初值采用grapes-3dvar系统生成的分析场,背景场和侧边界条件由数值预报中心t639全球集合预报系统提供。etkf初值扰动方法采用12h集合扰动循环计算方案(即将集合预报系统12h短期预报场构成的预报扰动更新为当前时刻的分析扰动),计算投影矩阵e采用的变量为grapes-meso模式面纬向风u和经向风v,采用的垂直层次为11层。观测资料采用模拟观测资料,即将t639全球模式分析场插值到观测站点上,模拟观测站点选择参考真实观测站分布(见图3)。
[0117]
观测站数为1100个左右,扰动分析场由etkf方法计算的14个扰动场与控制预报初
值相加获得。试验预报时效为72h,预报范围覆盖整个中国区域(15
°
~55
°
n,70
°
~140
°
e)。试验时段为2015年6月1日12:00(协调世界时,下同)至6月15日12:00,其中6月1日至10日为etkf分析扰动α参数计算适应调整期。
[0118]
2.grapes-reps侧边界扰动构建方案
[0119]
设计了基于grapes-geps全球集合预报系统的大尺度背景驱动数据,提取grapes-reps区域集合预报系统所需侧边界条件的扰动值,并与控制预报侧边界条件相加形成扰动成员预报所需的扰动侧边界条件,侧边界扰动生成方案和流程如图4所示。
[0120]
首先,基于grpaes-meso-3km的全球模式背景场数据,利用动力降尺度方法产生grapes-reps控制预报模式的初值和测边界条件bdy_ctl
reps
。其次,从grapes-geps全球集合预报中选择控制预报和第1至14个集合成员的背景场资料,具体采用grapes-geps集合预报业务编号01-14的扰动成员和编号00的控制预报背景场资料,利用动力降尺度方法产生01-14个集合成员侧边界条件,并减去编号为00的控制预报产生的侧边界,获得第i个集合预报成员的侧边界扰动值bdy_perti:
[0121][0122]
其中i为集合预报成员号。最后,将控制预报侧边界条件bdy_ctl
reps
与上式计算出的侧边界扰动量相加,生成grapes-reps侧边界扰动,如下式所示:
[0123][0124]
3.grapes-reps区域集合预报业务化系统构建
[0125]
在中国气象局曙光pi-sugon高性能计算机上,研发并应用区域集合预报系统,基于ecflow技术构建系统运行流程的调度,通过并发调度和并发数控制机制,建立了grapes_reps区域集合预报系统,系统技术参数见表1。
[0126]
表1 grapes-reps区域集合预报系统参数
[0127]
控制预报模式grapes-meso4.3水平分辨率/垂直层次0.1度,50层控制预报初值同grapes-3km初值生成方法物理过程同grapes-3km kf积云对流参数化过程积分步长60秒初值不确定性集合变换卡尔曼滤波方法模式不确定性随机物理过程倾向项扰动法测边界不确定性grapes-geps全球集合预报台风定位不确定性台风涡旋条件重定位方法集合成员数15预报时效84小时(00、12时次),6小时(06、18时次)模式产品输出频率1小时集合预报后处理grib2数据、常规天气预报产品、应急服务数据
[0128]
grapes-reps系统运行流程如图5所示。
[0129]
该系统将背景资料预处理、侧边界扰动构建、台风涡旋重定位、集合卡尔曼滤波初值扰动、云分析、集合预报成员积分模式和产品后处理技术等多项模块集成到一起,各模块
主要功能简述如下:
[0130]
(1)grapes-reps背景场资料处理。grapes-reps的背景场资料处理分为控制预报背景场资料处理和基于grapes-geps的扰动成员背景场资料处理。前者使用grapes-3km同样的全球模式资料(全球0.5
°
grib2格式资料),处理得到初步的控制预报初始场和侧边界条件,为控制预报台风涡旋重定位和侧边界扰动构建提供输入数据。后者基于grapes-geps提供的集合背景场资料(全球集合预报0.5
°
grib2格式资料),处理得到初步的15组扰动成员(包括geps控制预报)预报初始场和侧边界条件,为侧边界扰动构建提供输入数据。
[0131]
(2)控制预报和集合预报成员侧边界扰动构建。基于grapes-meso-3km的全球模式背景场数据产生grapes-reps控制预报侧边界条件,利用grapes-geps全球集合预报背景场资料产生集合扰动成员侧边界扰动量,并叠加到控制预报侧边界条件上,获得集合预报扰动成员侧边界。
[0132]
(3)集合卡尔曼滤波变换etkf初值扰动。使用grapes-reps区域集合预报前一个时次的6h预报场,当前预报时次的模拟观测数据,模拟观测站点信息以及当前预报时次的grapes-reps控制预报的模式初值,构建分析扰动场,生成14个扰动成员的扰动初始场,为扰动成员台风涡旋重定位提供输入数据。
[0133]
(4)台风涡旋条件重定位方案。grapes-reps的台风涡旋重定位方案通过检索台风报文、计算模式分析场台风涡旋中心和观测台风涡旋中心的距离(是否大于0.15度阈值),对预报初始场进行修正。控制预报的台风涡旋重定位方案在控制预报背景场资料处理之后执行,为控制预报模式积分提供初始场,并提供更为合理的控制预报模式初值给集合卡尔曼滤波初值扰动模块。扰动成员的台风涡旋重定位方案则设计在集合卡尔曼滤波初值扰动之后,在etkf提供的合理扰动初始场的基础上,对预报初始场进行修正,为扰动成员模式积分提供更合理的扰动初始场。
[0134]
(5)集合预报成员云分析。综合各我国多普勒天气雷达三维格点拼图资料、风云静止气象卫星亮温和模式背景场资料信息,根据云热力动力学原理及观测试验经验关系等,对云的信息进行分析,应用到模式预报前期改善模式降水预报效果。该模块生成云水资料,为控制预报和14个扰动成员的模式积分提供云分析数据。
[0135]
(6)控制预报积分。利用0.1
°
分辨率grapes-meso v4.3模式、前面步骤得到的控制预报初始场和侧边界条件进行84hr积分,得到控制预报积分结果。输入数据为0.1
°
控制预报初值和侧边界条件,输出为84hr预报时效内逐1hr预报结果。输出结果存储于曙光高性能计算机的文件系统中。
[0136]
(7)模式扰动参数生成及14个扰动成员模式积分。生成14个扰动成员sppt模式扰动方案所需的随机种子、扰动量大小、随机扰动截断波数、失相关时间系数,利用加入grapes-meso模式中的模式扰动sppt模式运行程序,完成14个扰动成员的84hr积分,得到14个扰动成员预报结果。输入数据为14个扰动成员初始场、随机种子、扰动量大小、随机扰动截断波数、失相关时间系数等参数,输出为84hr预报时效内逐1hr预报结果。输出结果存储于曙光高性能计算机的文件系统中。
[0137]
(8)集合预报积分数据统一后处理。通过控制文件规定需要输出的要素和层次,模式面的模式变量输出经过统一后处理模块生成grib2格式的输出结果,其中包含等压面变量、模式面变量和全部诊断变量,改处理过程在某一诗词集合预报结果生成后立即开启,为
产品后处理提供及时的grib2数据。
[0138]
(9)集合预报产品后处理。利用统一后处理得到的grib2格式集合预报结果,生成业务集合预报产品。常规集合预报产品模块将生成集合预报箱线图数据、台风路径集合预报数据以及micaps格式数据。产品内容包括:集合平均、集合离散度、集合最大/最小值、集合分位数、众数和概率等等。设计系统合理的启动时间节点,实现自动化业务运行。进行集合预报产品传送流程设计,实现集合预报产品传送至中央气象台。
[0139]
下面结合仿真实验对本发明的技术方案作进一步描述。
[0140]
1.0.1度水平分辨率graeps-reps集合预报试验结果
[0141]
(1)沿正交方向的误差方差分布
[0142]
图6为2015年6月11日00:00至15日12:00(每日两次,共计10次)平均的预报和分析扰动协方差矩阵特征值分布:(a)10km水平分辨率试验(简称10km试验);(b)15km水平分辨率试验(简称15km试验)。深红、深蓝:预报扰动;浅红、浅蓝:分析扰动。
[0143]
图6给出了2015年6月11日00:00至15日12:00(每日两次,共计10次)平均的12h预报扰动与分析扰动协方差矩阵的特征值谱分布(由第一个特征值进行归一化处理得到)。归一化特征值谱分布越平缓说明大量的特征向量参与描述预报不确定性,反之,特征值谱分布越陡峭说明只有少量特征向量参与描述预报的不确定性。从图中可看出,0.1度(见图6a)与0.15度(见图6b)试验的模式12h预报扰动特征值谱分布较陡峭,说明特征值相差较大,而分析扰动协方差矩阵的特征值分布较为平缓,特征值大小基本相当。故通过集合卡尔曼滤波后,集合方差可以平均分配到集合子空间的全部特征向量上,保证每个扰动成员均参与描述误差方差,etkf初值扰动方案产生的分析扰动在标准化观测空间中相互正交且不相关,0.15和0.1度试验中集合预报均具有这一特性。
[0144]
(2)集合扰动α参数值及放大因子π变化特征
[0145]
图7为2015年6月1日12:00至15日12:00(每日两次,共计10次)的0.1度(红色)试验与0.15度(蓝色)试验的模式初值扰动量(a)参数值α及(b)放大因子π的逐日演变。
[0146]
放大因子∏n是由不同循环时间αn参数确定的,以确保集合离散度与集合平均均方根误差量级相当。在etkf集合扰动计算初期,由于初始集合离散度与预报均方根误差量级不协调,造成αn参数值很不稳定;经过约3~4天的扰动循环计算后,初始集合离散度与预报均方根误差量级逐渐趋于协调,αn参数逐渐稳定于0.8~1.2左右,放大因子的分布也趋于稳定。图7给出了0.1度与0.15km试验中,αn参数值(见图7a)及放大因子πn(见图7b)随时间的演变,初始时刻的αn参数值及放大因子πn均为1。由图7可知,在2015年6月1日12:00至4日12:00试验时段(即初始扰动适应调整期),αn参数值很不稳定,且10km试验的参数值大于15km试验的,这是因为在此过程中,与15km试验相比,10km试验的集合平均均方根误差显著增长,而集合离散度增长幅度较小。之后,15km和10km分辨率的αn参数值均维持在0.8~1.2之间,平均值接近于1,放大因子πn也趋于稳定,15km试验的放大因子维持在30~40之间,10km试验的放大因子维持在40~50之间,故不同分辨率的etkf初值方案α参数及放大因子均具有较好的稳定性。
[0147]
综上,本发明提供的grapes-reps区域集合预报系统改进了etkf初值扰动方案并优化了测边界扰动不确定性方案,提升了预报系统离散度及区域集合预报系统性能,从而满足区域集合预报系统业务化应用需求,可以有针对性地制作和提供天气预报服务。本发
明可为各级气象台提供不同层次、不同预报时效的1h间隔集合预报产品,为天气预报提供指导和参考;还可为集合预报研发者提供反映模式性能和集合成员特征的产品,以便于模式开发者提高集合预报系统性能;还能为我国参与wmo的fdp、rdp项目提供中国区域集合预报产品;为重大气象保障工作提供更有针对性的产品:如大型体育赛事比赛场馆和格点上的集合预报产品、大型社会活动的精细和人性化的集合预报产品等,为赛事活动的正常开展提供技术保障。
[0148]
在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0149]
在上述实施例中,可以全部或部分地通过软件、硬件、固件或者其任意组合来实现。当使用全部或部分地以计算机程序产品的形式实现,所述计算机程序产品包括一个或多个计算机指令。在计算机上加载或执行所述计算机程序指令时,全部或部分地产生按照本发明实施例所述的流程或功能。所述计算机可以是通用计算机、专用计算机、计算机网络、或者其他可编程装置。所述计算机指令可以存储在计算机可读存储介质中,或者从一个计算机可读存储介质向另一个计算机可读存储介质传输,例如,所述计算机指令可以从一个网站站点、计算机、服务器或数据中心通过有线(例如同轴电缆、光纤、数字用户线(dsl)或无线(例如红外、无线、微波等)方式向另一个网站站点、计算机、服务器或数据中心进行传输)。所述计算机可读取存储介质可以是计算机能够存取的任何可用介质或者是包含一个或多个可用介质集成的服务器、数据中心等数据存储设备。所述可用介质可以是磁性介质,(例如,软盘、硬盘、磁带)、光介质(例如,dvd)、或者半导体介质(例如固态硬盘solid state disk(ssd))等。
[0150]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。