1.本发明涉及检测带状的物品的变形的传感器。
背景技术:
2.作为与现有的传感器有关的发明,例如已知专利文献1所记载的把持探测传感器。该把持探测传感器具备:压电膜、第一电极以及第二电极。压电膜具有长的带形状。压电膜具有第一主面和第二主面。第一电极设置于压电膜的第一主面。第二电极设置于压电膜的第二主面。把持探测传感器以螺旋状卷绕在管的周面。由此,当管被弯曲时,则压电膜变形。其结果,从第一电极和第二电极输出与压电膜的变形相应的信号。
3.专利文献1:国际公开第2018/173429号
4.然而,在专利文献1的把持探测传感器中,有时无法高精度地探测管的变形。例如,若管以弯曲的方式变形,则压电膜中位于比管更靠外周侧的部分因拉伸应力而以伸长的方式变形。此时,在压电膜中位于比管更靠外周侧的部分中例如产生正电荷。另一方面,压电膜中位于比管更靠内周侧的部分因压缩应力而以被压缩的方式变形。此时,在压电膜中位于比管更靠内周侧的部分例如产生负电荷。其结果,在压电膜产生的电荷被抵消。其结果,专利文献1的把持探测传感器有时无法高精度地探测管的变形。
技术实现要素:
5.因此,本发明的目的在于提供能够检测带状的物品的变形的传感器。
6.本发明的一方式所涉及的传感器是检测带状的物品的变形的传感器,具备:
7.第一膜,具有第一主面以及第二主面,产生与第一膜的变形量相应的电荷;
8.第一电极,设置于上述第一主面;
9.第二电极,设置于上述第二主面;以及
10.第一固定部件及第二固定部件,将上述第一膜、上述第一电极以及上述第二电极固定于上述物品,
11.上述第一膜绕上述物品的周面半周以上,
12.上述第二电极位于比上述第一电极更靠上述物品的附近,
13.上述第一固定部件在上述物品延伸的延伸方向上远离上述第二固定部件。
14.在本说明书中,沿前后方向延伸的轴、部件不一定仅表示与前后方向平行的轴、部件。所谓的沿前后方向延伸的轴、部件,是相对于前后方向在
±
45
°
的范围内倾斜的轴、部件。同样地,所谓的沿上下方向延伸的轴、部件,是相对于上下方向在
±
45
°
的范围内倾斜的轴、部件。所谓的沿左右方向延伸的轴、部件,是相对于左右方向在
±
45
°
的范围内倾斜的轴、部件。
15.以下,第一部件、第二部件以及第三部件是传感器具备的构造物。在本说明书中,第一部件被第二部件支承包括:第一部件相对于第二部件不可移动地安装于第二部件(即,被固定或被保持)的情况、以及第一部件相对于第二部件可移动地安装于第二部件的情况。
另外,第一部件被第二部件支承包括:第一部件直接安装于第二部件的情况、以及第一部件经由第三部件安装于第二部件的情况这两方。
16.在本说明书中,沿前后方向排列的第一部件以及第二部件表示以下的状态。在与前后方向垂直的方向上观察第一部件以及第二部件时,是第一部件以及第二部件的双方配置在表示前后方向的任意的直线上的状态。在本说明书中,在上下方向上观察时沿前后方向排列的第一部件以及第二部件表示以下的状态。在上下方向上观察第一部件以及第二部件时,第一部件以及第二部件双方配置在表示前后方向的任意的直线上。该情况下,若从与上下方向不同的左右方向观察第一部件以及第二部件,则第一部件以及第二部件的任意一方也可以不配置在表示前后方向的任意的直线上。此外,第一部件和第二部件也可以接触。第一部件和第二部件也可以远离。也可以在第一部件与第二部件之间存在第三部件。该定义也适用于前后方向以外的方向。
17.在本说明书中,将第一部件配置在第二部件的前面是指以下的状态。第一部件的一部分配置在第二部件向前方向平行移动时通过的区域内。因而,第一部件可以收纳在第二部件向前方向平行移动时通过的区域内,也可以从第二部件向前方向平行移动时通过的区域突出。该情况下,第一部件以及第二部件沿前后方向排列。该定义也适用于前后方向以外的方向。
18.在本说明书中,在左右方向上观察时,将第一部件配置在第二部件的前面是指以下的状态。在左右方向上观察时,第一部件和第二部件沿前后方向排列,并且,在左右方向上观察时,第一部件与第二部件对置的部分配置于第二部件的前面。在该定义中,第一部件和第二部件可以不是在三个维度上沿前后方向排列。该定义也适用于前后方向以外的方向。
19.在本说明书中,比第二部件更靠前配置第一部件是指以下的状态。
20.第一部件配置在通过第二部件的前端且与前后方向正交的平面的前面。该情况下,第一部件和第二部件可以沿前后方向上排列,也可以不沿前后方向排列。该定义也适用于前后方向以外的方向。
21.在本说明书中,只要未特殊说明的情况下,如以下那样对第一部件的各部进行定义。第一部件的前部意味着第一部件的前半部分。第一部件的后部意味着第一部件的后半部分。第一部件的左部意味着第一部件的左半部分。第一部件的右部意味着第一部件的右半部分。第一部件的上部意味着第一部件的上半部分。第一部件的下部意味着第一部件的下半部分。第一部件的前端意味着第一部件的前方向的端。第一部件的后端意味着第一部件的后方向的端。第一部件的左端意味着第一部件的左方向的端。第一部件的右端意味着第一部件的右方向的端。第一部件的上端意味着第一部件的上方向的端。第一部件的下端意味着第一部件的下方向的端。第一部件的前端部意味着第一部件的前端及其附近。第一部件的后端部意味着第一部件的后端及其附近。第一部件的左端部意味着第一部件的左端及其附近。第一部件的右端部意味着第一部件的右端及其附近。第一部件的上端部意味着第一部件的上端及其附近。第一部件的下端部意味着第一部件的下端及其附近。
22.在本说明书中,第一部件和第二部件电连接包括以下两种意思。第一种意思是通过第一部件和第二部件物理接触,从而直流电流能够流向第一部件和第二部件。第二种意思是通过第一部件和第三部件物理接触且第三部件和第二部件物理接触,从而直流电流能
够流向第一部件和第二部件。在第二种意思中,第一部件和第二部件可以物理接触,也可以不接触。在第二种意思中,第三部件可以是单一的部件,也可以包括多个部件。
23.根据本发明所涉及的传感器,传感器能够检测带状的物品的变形。
附图说明
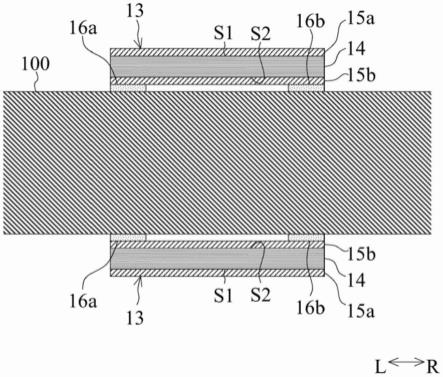
24.图1是传感器13的展开图以及a-a处的剖视图。
25.图2是将传感器13安装于物品100的状态的立体图。
26.图3是图2的b-b处的剖视图。
27.图4是物品100被弯曲时的剖视图。
28.图5是物品100被弯曲的状态下的传感器13以及物品100的立体图。
29.图6是物品100被弯曲的状态下的比较例所涉及的传感器113以及物品100的立体图。
30.图7是传感器13a的展开图以及a-a处的剖视图。
31.图8是传感器13b的展开图以及a-a处的剖视图。
32.图9是传感器13b以及物品100的剖视图。
33.图10是传感器13c的展开图以及a-a处的剖视图。
34.图11是传感器13d以及物品100的剖视图。
35.图12是传感器13e以及物品100的剖视图。
36.图13是表示传感器13e-1、13e-2各自输出的第一检测信号和第二检测信号的波形的图表。
37.图14是表示传感器13e-1、13e-2各自输出的第一检测信号和第二检测信号的波形的图表。
38.图15是传感器13f以及物品100的剖视图。
39.图16是传感器13g的展开图以及a-a处的剖视图。
40.图17是传感器13h的展开图以及a-a处的剖视图。
具体实施方式
41.(实施方式)
42.以下,参照附图,对本发明的一个实施方式所涉及的传感器13的结构进行说明。图1是传感器13的展开图以及a-a处的剖视图。图2是将传感器13安装于物品100的状态的立体图。图3是图2的b-b处的剖视图。
43.另外,在本说明书中,如以下那样定义方向。在展开状态的传感器13中,将第一膜14的法线方向定义为上下方向。将第一膜14的长边延伸的方向定义为前后方向。将第一膜14的短边延伸的方向定义为左右方向。上下方向、左右方向以及前后方向相互正交。此外,本说明书中的方向的定义是一个例子。因此,传感器13的实际使用时的方向和本说明书中的方向不需要一致。另外,在图1中,上下方向也可以反转。同样地,在图1中,左右方向也可以反转。在图1中,前后方向也可以反转。
44.传感器13检测带状的物品100的变形。带状是长且具有挠性的形状。在本实施方式中,如图2所示,物品100是包含信号线的电缆。将物品100延伸的方向称为延伸方向。如图2
所示,延伸方向与左右方向一致。另外,物品100的周面是包围物品100的中心线的面。
45.传感器13输出与物品100的变形相应的检测信号。物品100的变形例如是物品100的弯曲、物品100的扭曲。所谓的物品100的弯曲是指使物品100的中心轴线从直线变形为曲线。所谓的物品100的扭曲是指不使物品100的中心轴线变形,而使物品100绕物品100的中心轴线变形。在本实施方式中,物品100的变形是物品100的弯曲。如图1所示,传感器13具备:第一膜14、第一电极15a、第二电极15b、第一固定部件16a以及第二固定部件16b。
46.如图1所示,第一膜14具有片形状。因此,第一膜14具有第一主面s1和第二主面s2。第一主面s1是上主面。第二主面s2是下主面。在上下方向上观察,第一膜14具有长方形。第一膜14的长边沿前后方向延伸。第一膜14的短边沿左右方向延伸。第一膜14产生与第一膜14的变形量相应的电荷。第一膜14是压电膜。在本实施方式中,第一膜14是plla膜。以下,进一步详细对第一膜14进行说明。
47.第一膜14是由手性高分子形成的膜。所谓的手性高分子例如是聚乳酸(pla)、特别是左旋聚乳酸(plla)。由手性高分子构成的plla的主链具有螺旋结构。plla若被单轴拉伸而分子取向,则具有压电性。而且,通过第一膜14在左右方向上伸长或者在左右方向上压缩,第一膜14产生电荷。第一膜14若在左右方向上伸长,则例如产生正电荷。第一膜14若在左右方向上被压缩,则例如产生负电荷。电荷的大小取决于拉伸或者压缩引起的第一膜14的变形量。更准确而言,电荷的大小取决于拉伸或者压缩引起的第一膜14的变形量的微分值。因此,第一膜14的单轴拉伸方向(取向方向)相对于前后方向以及左右方向的每个方向形成45度的角度。因此,在第一膜14被展开的状态下,第一膜14的单轴拉伸方向(取向方向)相对于左右方向(延伸方向)形成45度的角度。该45度例如包括包含45度
±
10度左右的角度。
48.第一电极15a是接地电极。第一电极15a与接地电位连接。如图1所示,第一电极15a设置于第一主面s1。在本实施方式中,第一电极15a覆盖第一主面s1的整个面。因此,在上下方向上观察,第一电极15a具有长方形。第一电极15a的材料例如是pedot那样的导电性高分子。
49.第二电极15b是信号电极。从第二电极15b输出检测信号。如图1所示,第二电极15b设置于第二主面s2。由此,第一膜14位于第一电极15a与第二电极15b之间。在本实施方式中,第二电极15b覆盖第二主面s2的整个面。因此,在上下方向上观察,第二电极15b具有长方形。第二电极15b的材料例如是pedot那样的导电性高分子。
50.如图3所示,第一固定部件16a以及第二固定部件16b将第一膜14、第一电极15a以及第二电极15b固定于物品100。如图1所示,第一固定部件16a以及第二固定部件16b设置于第二电极15b的下表面。更详细而言,第一膜14在左右方向(延伸方向)上具有左端部(第一端部)和右端部(第二端部)。第一膜14的左端部是第一膜14的左侧的长边(以下,左长边)。第一膜14的右端部是第一膜14的右侧的长边(以下,右长边)。第一固定部件16a与第一膜14的左长边(第一端部)接触。第一固定部件16a沿着第一膜14的整个左长边在前后方向上延伸。第二固定部件16b与第一膜14的右长边(第二端部)接触。第二固定部件16b沿着第一膜14的整个右长边在前后方向上延伸。因此,第一固定部件16a位于第二固定部件16b的左侧。第一固定部件16a以及第二固定部件16b的材料例如是丙烯酸系的粘合剂。
51.另外,第一固定部件16a在左右方向(延伸方向)上远离第二固定部件16b。在本实
施方式中,在第一膜14被展开的状态下,在上下方向(第一膜14的第一主面s1的法线方向)上观察,第一固定部件16a以及第二固定部件16b与第一膜14的左右方向(延伸方向)的中央不重叠。
52.此处,对传感器13被固定于物品100的方式进行说明。第一膜14绕物品100的周面半周以上。在本实施方式中,如图2所示,第一膜14通过绕物品100的周面一周而具有圆筒形状。第一电极15a以及第二电极15b也通过绕物品100的周面一周而具有圆筒形状。此时,第一主面s1是第一膜14形成的圆筒形状的外周面。第二主面s2是第一膜14形成的圆筒形状的内周面。第一电极15a设置于第一主面s1。第二电极15b设置于第二主面s2。因此,第二电极15b位于比第一电极15a更靠物品100的附近。
53.在左右方向上观察,第一固定部件16a具有圆环形状。第一固定部件16a位于物品100与第二电极15b之间。由此,第一固定部件16a将第二电极15b固定于物品100。
54.在左右方向上观察,第二固定部件16b具有圆环形状。第二固定部件16b位于物品100与第二电极15b之间。由此,第二固定部件16b将第二电极15b固定于物品100。
55.第二电极15b中未设置第一固定部件16a以及第二固定部件16b的部分没有固定于物品100。因此,如图3所示,在第二电极15b中未设置第一固定部件16a以及第二固定部件16b的部分与物品100之间存在间隙。由此,传感器13中未设置第一固定部件16a以及第二固定部件16b的部分没有固定于物品100。此外,在上下方向上观察,第二电极15b中未设置第一固定部件16a以及第二固定部件16b的部分是第二电极15b中位于第一固定部件16a与第二固定部件16b之间的部分。
56.[效果]
[0057]
根据传感器13,传感器13能够检测带状的物品100的变形。图4是物品100被弯曲时的剖视图。若物品100被弯曲,则第一膜14中位于比物品100更靠外周侧的部分由于拉伸应力而在左右方向上伸长。另一方面,第一膜14中位于比物品100更靠内周侧的部分由于压缩应力而在左右方向上被压缩。但是,第一固定部件16a在左右方向(延伸方向)上远离第二固定部件16b。由此,第二电极15b中未设置第一固定部件16a和第二固定部件16b的部分没有固定在物品100。因此,如图4所示,第一膜14中位于比物品100更靠内周侧的部分没有被大幅压缩而挠曲。由此,减少第一膜14中位于比物品100更靠内周侧的部分产生的电荷量。其结果,减少第一膜14中位于比物品100更靠外周侧的部分产生的电荷被第一膜14中位于比物品100更靠内周侧的部分产生的相反极性的电荷抵消。因而,传感器13能够输出具有充分的电压的检测信号。综上所述,根据传感器13,传感器13能够检测带状的物品100的变形。
[0058]
根据传感器13,传感器13能够更高精度地探测带状的物品100的变形。更详细而言,第一固定部件16a与第一膜14的左端部接触。第二固定部件16b与第一膜14的右端部接触。因此,若物品100变形,则第一膜14的左端部被向左拉伸,第一膜14的右端部被向右拉伸。由此,第一膜14的整体变形。因而,第一膜14的变形量变大。其结果,传感器13输出的检测信号的电压变大。综上所述,根据传感器13,传感器13能够更高精度地探测带状的物品100的变形。
[0059]
根据传感器13,传感器13能够更高精度地探测带状的物品100的变形。更详细而言,物品100被弯曲时第一膜14中最被压缩的部分是第一膜14的左右方向上的中央。即,在第一膜14的左右方向上的中央最能产生正电荷以及负电荷。因此,为了增大检测信号的电
压,优选抑制第一膜14的左右方向上的中央的压缩。因此,在第一膜14被展开的状态下,在上下方向上观察,第一固定部件16a以及第二固定部件16b与第一膜14的左右方向上的中央不重叠。因而,第一膜14的左右方向上的中央没有固定在物品100。其结果,抑制第一膜14的左右方向上的中央被压缩。综上所述,传感器13输出的检测信号的电压变大。即,根据传感器13,传感器13能够更高精度地探测带状的物品100的变形。
[0060]
根据传感器13,减少在传感器13输出的检测信号中包含噪声。更详细而言,第二电极15b位于比第一电极15a更靠物品100的附近。第一电极15a是接地电极。第二电极15b是信号电极。因此,作为信号电极的第二电极15b被作为接地电极的第一电极15a覆盖。由此,噪声在作为接地电极的第一电极15a中被屏蔽。即,抑制噪声到达作为信号电极的第二电极15b。其结果,根据传感器13,减少在传感器13输出的检测信号中包含噪声。此外,根据相同的理由,抑制从传感器13产生不必要的辐射。
[0061]
根据传感器13,传感器13能够检测多个方向的物品100的弯曲。图5是物品100被弯曲的状态下的传感器13以及物品100的立体图。图6是物品100被弯曲的状态下的比较例所涉及的传感器113以及物品100的立体图。
[0062]
图6所示的比较例所涉及的传感器113的第一膜114设置于物品100的周向的一部分。该情况下,若传感器113的第一膜114设置于与物品100的弯曲方向正交的面(例如,纸面近前的面),则传感器113的第一膜114的变形量变小。因此,传感器113有时难以检测物品100的弯曲。
[0063]
因此,在传感器13中,如图5所示,第一膜14通过绕物品100的周面一周而具有圆筒形状。由此,传感器13向任意的方向弯曲时,第一膜14都充分地变形。因而,根据传感器13,传感器13能够检测多个方向的物品100的弯曲。
[0064]
以上那样的传感器13例如用于探测配置于机器人手臂的关节部的电缆的变形。但是,传感器13的用途并不限于此。
[0065]
(第一变形例)
[0066]
接下来,参照附图,对第一变形例所涉及的传感器13a进行说明。图7是传感器13a的展开图以及a-a处的剖视图。
[0067]
传感器13a在第一膜14的取向方向上与传感器13不同。在传感器13a中,在第一膜14被展开的状态下,第一膜14的取向方向与左右方向(延伸方向)平行。该平行例如包含从平行偏移
±
10度左右的角度。此外,传感器13a的其它结构与传感器13相同,因此省略说明。根据这样的传感器13a,传感器13a能够检测物品100的扭曲。
[0068]
(第二变形例)
[0069]
接下来,参照附图,对第二变形例所涉及的传感器13b进行说明。图8是传感器13b的展开图以及a-a处的剖视图。图9是传感器13b以及物品100的剖视图。
[0070]
传感器13b与传感器13不同的点在于,还具备第二膜54、第三电极55a、第四电极55b以及固定部件60。以下,以该不同点为中心对传感器13b进行说明。
[0071]
传感器13b的第一膜14、第一电极15a、第二电极15b、第一固定部件16a以及第二固定部件16b与传感器13的第一膜14、第一电极15a、第二电极15b、第一固定部件16a以及第二固定部件16b相同,因此省略说明。
[0072]
如图8所示,第二膜54具有片形状。因此,第二膜54具有第三主面s3以及第四主面
s4。第三主面s3是上主面。第四主面s4是下主面。在上下方向上观察,第二膜54具有长方形。第二膜54的长边沿前后方向延伸。第二膜54的短边沿左右方向延伸。在上下方向上观察,第二膜54的外缘与第一膜14的外缘一致。第二膜54产生与第二膜54的变形量相应的电荷。第二膜54是压电膜。在本实施方式中,第二膜54是plla膜。
[0073]
在第二膜54被展开的状态下,第二膜54的单轴拉伸方向(取向方向)与左右方向(延伸方向)平行。由此,第二膜54通过第二膜54在与前后方向以及及左右方向形成45度的方向上伸长或者在与前后方向及左右方向形成45度的方向上被压缩而产生电荷。第一膜14若在与前后方向及左右方向形成45度的方向上伸长,则例如产生正电荷。第一膜14若在与前后方向及左右方向形成45度的方向上被压缩,则例如产生负电荷。电荷的大小取决于由于伸长或压缩引起的第一膜14的变形量。更准确而言,电荷的大小取决于由于伸长或压缩引起的第一膜14的变形量的微分值。
[0074]
第三电极55a是接地电极。第三电极55a与接地电位连接。如图8所示,第三电极55a设置于第三主面s3。在本实施方式中,第三电极55a覆盖第三主面s3的整个面。因此,在上下方向上观察,第三电极55a具有长方形。第三电极55a的材料例如是pedot那样的导电性高分子。
[0075]
第四电极55b是信号电极。从第四电极55b输出检测信号。如图8所示,第四电极55b设置于第四主面s4。由此,第二膜54位于第三电极55a与第四电极55b之间。在本实施方式中,第四电极55b覆盖第四主面s4的整个面。因此,在上下方向上观察,第四电极55b具有长方形。第四电极55b的材料例如是pedot那样的导电性高分子。
[0076]
固定部件60粘合第四电极55b和第一电极15a。由此,第一膜14和第二膜54重叠。固定部件60的材料例如是丙烯酸系的粘合剂。
[0077]
另外,如图9所示,第二膜54通过绕第一电极15a的周面一周而具有圆筒形状。此时,第四电极55b位于比第三电极55a更靠物品100的附近。
[0078]
根据传感器13b,传感器13b能够检测带状的物品100的弯曲以及扭曲。
[0079]
(第三变形例)
[0080]
接下来,参照附图,对第三变形例所涉及的传感器13c进行说明。图10是传感器13c的展开图以及a-a处的剖视图。
[0081]
传感器13c在第一膜14的取向方向以及第二膜54的取向方向上与传感器13b不同。具体而言,在传感器13c中,在第一膜14被展开的状态下,第一膜14的取向方向与左右方向(延伸方向)平行。在第二膜54被展开的状态下,第二膜54的取向方向相对于左右方向(延伸方向)形成45度的角度。传感器13c的其它结构与传感器13b相同,因此省略说明。
[0082]
根据传感器13c,传感器13c能够检测带状的物品100的弯曲以及扭曲。
[0083]
(第四变形例)
[0084]
接下来,参照附图,对第四变形例所涉及的传感器13d进行说明。图11是传感器13d以及物品100的剖视图。
[0085]
传感器13d在第一固定部件16a、第二固定部件16b以及第二电极15b的构造上与传感器13不同。更详细而言,在第一膜14被展开的状态下,在上下方向(第一膜14的第一主面s1的法线方向)上观察,第一固定部件16a以及第二固定部件16b与第二电极15b不重叠。因此,第二电极15b没有设置于第一膜14的第二主面s2的整个面。第一固定部件16a和第二固
定部件16b与第一膜14的第二主面s2接触。由此,第一固定部件16a以及第二固定部件16b将第一膜14固定于物品100。
[0086]
根据传感器13d,传感器13d能够更高精度地探测带状的物品100的变形。更详细而言,第一膜14中在上下方向上观察与第一固定部件16a以及第二固定部件16b重叠的部分被固定于物品100。若物品100被弯曲,则第一膜14中在上下方向上观察与第一固定部件16a以及第二固定部件16b重叠的部分在左右方向上伸长或者被压缩。因此,第一膜14中在上下方向上观察与第一固定部件16a以及第二固定部件16b重叠的部分中,正电荷和负电荷容易被抵消。因此,在第一膜14被展开的状态下,在上下方向(第一膜14的第一主面s1的法线方向)上观察,第一固定部件16a以及第二固定部件16b与第二电极15b不重叠。由此,第一膜14中在上下方向上观察与第一固定部件16a和第二固定部件16b重叠的部分产生的电荷对检测信号的生成没有贡献。其结果,根据传感器13d,传感器13d能够更高精度地探测带状的物品100的变形。
[0087]
(第五变形例)
[0088]
接下来,参照附图,对第五变形例所涉及的传感器13e进行说明。图12是传感器13e以及物品100的剖视图。图13和图14是表示传感器13e-1、13e-2分别输出的第一检测信号以及第二检测信号的波形的图表。纵轴表示电压。横轴表示时间。实线表示第一检测信号。虚线表示第二检测信号。
[0089]
传感器13e包括传感器13e-1、13e-2。传感器13e-1、13e-2左右并排地配置在物品100上。传感器13e-1与传感器13e-2的间隔比较小。传感器13e-1、13e-2的构造与传感器13相同,因此省略说明。
[0090]
传感器13e-1、13e-2与信号处理部200连接。信号处理部200基于传感器13e-1、13e-2分别输出的第一检测信号以及第二检测信号,来探测物品100的变形。信号处理部200例如通过cpu(central processing unit:中央处理器)来实现。
[0091]
另外,信号处理部200能够基于第一检测信号和第二检测信号来判定物品100产生了弯曲还是对物品100施加了冲击。具体而言,若物品100产生弯曲,则传感器13e-1和传感器13e-2也产生弯曲。传感器13e-1与传感器13e-2的间隔比较小。因此,在传感器13e-1产生的弯曲和在传感器13e-2产生的弯曲相似。因此,如图13所示,第一检测信号以及第二检测信号取相似的值。
[0092]
另一方面,若对物品100施加冲击,则例如施加于传感器13e-1的冲击比施加于传感器13e-2的冲击大。该情况下,在传感器13e-1产生的变形和在传感器13e-2产生的变形不同。因此,如图14所示,第一检测信号和第二检测信号取不同的值。
[0093]
因此,信号处理部200能够基于第一检测信号和第二检测信号来判定物品100产生了弯曲还是对物品100施加了冲击。
[0094]
(第六变形例)
[0095]
接下来,参照附图,对第六变形例所涉及的传感器13f进行说明。图15是传感器13f的剖视图。
[0096]
传感器13f与传感器13不同的点在于,还具备第三固定部件16c以及第四固定部件16d。在左右方向(延伸方向)上按照第一固定部件16a、第二固定部件16b、第三固定部件16c以及第四固定部件16d的顺序排列第一固定部件16a、第二固定部件16b、第三固定部件16c
以及第四固定部件16d。在本实施方式中,从左到右,按照第一固定部件16a、第二固定部件16b、第三固定部件16c以及第四固定部件16d的顺序等间隔地排列第一固定部件16a、第二固定部件16b、第三固定部件16c以及第四固定部件16d。因此,第二固定部件16b在左右方向(延伸方向)上远离第一固定部件16a。第三固定部件16c在左右方向(延伸方向)上远离第二固定部件16b。第四固定部件16d在左右方向(延伸方向)上远离第三固定部件16c。
[0097]
另外,第一固定部件16a、第二固定部件16b、第三固定部件16c以及第四固定部件16d将第一膜14、第一电极15a以及第二电极15b固定于物品100。
[0098]
根据传感器13f,四个第一固定部件16a、第二固定部件16b、第三固定部件16c以及第四固定部件16d在左右方向上隔开间隔的状态下将传感器13f固定于物品100。由此,能够将左右方向较长的传感器13f固定于物品100。因此,传感器13f能够探测比物品100更宽的范围的变形。
[0099]
(第七变形例)
[0100]
接下来,参照附图,对第七变形例所涉及的传感器13g进行说明。图16是传感器13g的展开图以及a-a处的剖视图。
[0101]
传感器13g与传感器13不同的点在于第一膜14是pvdf(聚偏二氟乙烯)膜。该情况下,如图16所示,在第一膜14被展开的状态下,第一膜14的取向方向与左右方向(延伸方向)平行。此外,传感器13g的其它结构与传感器13的结构相同,因此省略说明。
[0102]
根据传感器13g,传感器13g能够探测物品100的弯曲。另外,pvdf膜与plla膜相比,具有较高的灵敏度。因此,传感器13g具有较高的灵敏度。
[0103]
(第八变形例)
[0104]
接下来,参照附图,对第八变形例所涉及的传感器13h进行说明。图17是传感器13h的展开图以及a-a处的剖视图。
[0105]
传感器13h在第一膜14的取向方向上与传感器13g不同。在传感器13h中,如图17所示,在第一膜14被展开的状态下,第一膜14的取向方向相对于左右方向(延伸方向)形成45度的角度。此外,传感器13h的其它结构与传感器13g的结构相同,因此省略说明。
[0106]
根据传感器13h,传感器13h能够探测物品100的扭曲。另外,pvdf膜与plla膜相比,具有较高的灵敏度。因此,传感器13h具有较高的灵敏度。
[0107]
(其它实施方式)
[0108]
本发明所涉及的电子设备并不限于传感器13、13a~13g,能够在其主旨的范围内进行变更。另外,也可以任意组合传感器13、13a~13g的结构。
[0109]
此外,物品100并不限于电缆。物品100只要具有带状即可。因此,物品100例如也可以是管等。另外,与物品100的延伸方向正交的截面的形状并不限于圆形,也可以是矩形等。
[0110]
此外,传感器13、13a~13g并不限于压电传感器。传感器13、13a~13g例如也可以是应变传感器。
[0111]
此外,在传感器13、13a~13g中,第一电极15a也可以不覆盖第一主面s1的整个面。
[0112]
此外,在传感器13b、13c中,第一电极15a也可以不覆盖第一主面s1的整个面。第二电极15b也可以不覆盖第二主面s2的整个面。第三电极55a也可以不覆盖第三主面s3的整个面。第四电极55b也可以不覆盖第四主面s4的整个面。
[0113]
此外,在传感器13、13a~13e、13g、13h中,第一固定部件16a也可以与第一膜14的
左端部不接触。第二固定部件16b也可以与第一膜14的右端部不接触。
[0114]
此外,在传感器13、13a~13e、13g、13h中,第一固定部件16a以及第二固定部件16b也可以在第一膜14被展开的状态下,在上下方向上观察,与第一膜14的左右方向的中央重叠。
[0115]
此外,在传感器13、13a~13e、13g、13h中,第一电极15a也可以是信号电极。第二电极15b也可以是接地电极。但是,优选第一电极15a被抗蚀剂等保护层覆盖。
[0116]
附图标记说明
[0117]
13、13a~13h、13e-1、13e-2
…
传感器;14
…
第一膜;15a
…
第一电极;15b
…
第二电极;16a
…
第一固定部件;16b
…
第二固定部件;16c
…
第三固定部件;16d
…
第四固定部件;54
…
第二膜;55a
…
第三电极;55b
…
第四电极;60
…
固定部件;100
…
物品;200
…
信号处理部;s1
…
第一主面;s2
…
第二主面;s3
…
第三主面;s4
…
第四主面。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。