技术特征:
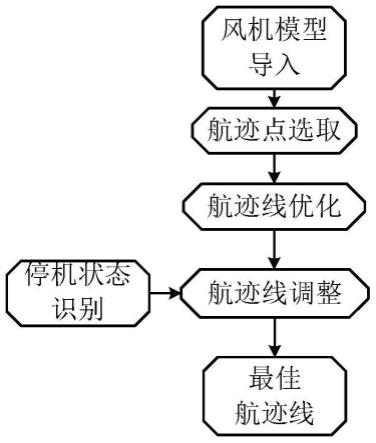
1.一种面向风机叶片巡检的无人机自动航迹线规划方法,其特征在于,包括以下步骤:首先,建立风机模型,并且根据巡检要求将风机模型进行网格化处理,得到风机面图形学模型,在风机面图形学模型的每个网格面片的基础上规划出候选航迹点区域,保证航迹点区域中选择出的航迹点至少可见一个完整的面片区域,保证获取完整的风机表面图像;随后,基于候选航迹点区域进行航迹点采样,完成航迹点优化;完成航迹线规划;进行风机姿态的识别并完成航迹线的调整。2.根据权利要求1所述的一种面向风机叶片巡检的无人机自动航迹线规划方法,其特征在于,建立风机模型,并且根据巡检要求将风机模型进行网格化处理,得到风机面图形学模型的步骤包括:选择建模工具根据风机三维尺寸信息建立三维的风机模型,从中导出风机模型的.stl格式的模型文件,.stl格式的模型文件以小三角形面片为基本单位,离散地近似描述上述风机模型的表面,能够满足将模型进行图像学表示的要求,.stl格式的模型文件记录所有三角形面片数量、各三角形顶点坐标及各面片的法向量,法向量符合右手规则,在此模型文件中,可获取风机模型的三角形面片数量、各面片的法向量及各三角形顶点坐标;使用materialise magics 24.0对建模工具得到的网格化的风机模型再次进行处理,得到满足需求的风机面图形学模型。3.根据权利要求1所述的一种面向风机叶片巡检的无人机自动航迹线规划方法,其特征在于,在规划候选航迹点区域时,从安全性考虑,约束安全范围,设定最大及最小安全空间,从可见性方面考虑,需要使无人机航向与三角形网格面片之间呈锐角,即使无人机的航向与三角形超平面的法向量之间的夹角大于零,三角形面片的超平面由其入射角决定,构建出约束条件,从而选择出可覆盖风机面图形学模型的所有三角形面片,保证获得高质量的完整风机表面图像,保证以最高的质量完成巡检任务。4.根据权利要求3所述的一种面向风机叶片巡检的无人机自动航迹线规划方法,其特征在于,从可见性方面考虑,使无人机航向与三角形面片之间为锐角,即使无人机的航向与三角形超平面的法向量之间的夹角大于零,三角形面片的超平面由其入射角决定,得到候选航迹区域,约束条件表述为平面约束,如式(1)所示:其中,g=(x,y,z)表示航迹点的空间位置,d
max
为最大安全空间,d
min
为最小安全空间,x
i
是网格三角形的角,a
n
是归一化三角形法线,m是三角形面片的中心点,n
i
是针对入射角约束的分离超平面的法线,∠in1,∠in2,∠in3表示最小入射角;无人机携带的成像设备以固定的俯仰角和相对航向安装在无人机上,其视场角fov分为垂直和水平开口,利用fov上限的等效约束,候选航迹区域被限制为三角形截面,由无人机自带的垂直照相机打开约束产生的总采样空间是在所有垂直方向上所有这些三角形截面的并集;将空间划分为n
c
块相等的凸块,约束条件则表示为式(2):
其中,分别表示三角形面片的相关角,n
right
、n
left
分别表示各个分离超平面的法向量。5.根据权利要求1所述的一种面向风机叶片巡检的无人机自动航迹线规划方法,其特征在于,根据风场的风机模型构建出其对应的风机面图形学模型,并通过该模型得到候选航迹点区域,在候选航迹点区域内选择航迹点时,需要迭代优化的进行,实现整体航迹点集的优化。6.根据权利要求5所述的一种面向风机叶片巡检的无人机自动航迹线规划方法,其特征在于,在进行航迹点的优化时,在候选航迹点区域内随机采样一个航迹点,然后以最小化当前航迹点g
k
到当前候选航迹点区域内航迹点g
k-1
、当前航迹点的前一个航迹点和后一个航迹点距离的平方之和为目标,如式(3)所示,前两个部分通过将航迹点移到更近的位置而缩短航迹线长度,而后两个部分则限制了改进步骤的大小,因为和也可能移近,通过逐步优化航迹点的选取,实现整体航迹点集的优化:近,通过逐步优化航迹点的选取,实现整体航迹点集的优化:式(4)中约束条件与选择候选航迹点区域一致;邻居距离的加权矩阵为:b=diag(b
const
,b
const
,a
const
b
const
)式中,b
const
为到邻居的距离的一般权重,a
const
为权重变化惩罚;旧巡视中当前视点的距离的加权矩阵为:d=diag(d
const
,d
const
,d
const
)
式中,d
const
为权重值;选取出航迹点后,选取当前航迹点g
k
至三角形面片中心点m的方向为航迹点的航向,即:ψ
k
=g
k-m。7.根据权利要求1所述的一种面向风机叶片巡检的无人机自动航迹线规划方法,其特征在于,完成航迹线规划的步骤包括:规划航迹线与选取航迹点时类似,都需要根据任务信息及无人机的操作注意事项对航迹线的规划进行约束,从而得到最优的航迹线,相关约束条件包括航迹线长度约束、爬升约束、避障约束、最小转弯半径约束;根据上述约束条件,无人机的航迹线在保证完成任务的情况下,使无人机的飞行时间越短越好,即完成覆盖全目标的航迹线规划过程中,最短的航迹线为最优;在求解最优航迹线的过程中,选择迭代重优化的方式,使航迹线逐步优化直至达到最优。8.根据权利要求7所述的一种面向风机叶片巡检的无人机自动航迹线规划方法,其特征在于,规划出的航迹线不重复的经过所有航迹点,采用如下算法获得初始航迹线:(1)选择初始航迹点v
i
(2)按以下3条约束从未被选过的航迹点中选择下一航迹点v
j
:1)边e
ij
是一条候选边;2)边e
ij
的α
π-接近度α
π
(e
ij
)=0;3)边e
ij
属于当前最优航迹线;若选择出的v
j
不能全部满足以上3条约束,则优先选择满足约束1)的航迹点,若都不能满足,则在未被选择过的航迹点中随机选择;(3)令i=j,i和j分别表示航迹点的编号,用于标记所有选择出的航迹点,如果还有未被选择的航迹线,返回步骤(2);如果在步骤(2)有多个的航迹点可供选择,则从中随机选择一点;规划出航迹线后,需要对航迹线进行迭代优化,在迭代优化的过程中,以5-opt操作为基本单位,称为基本操作,基本操作选择上次基本操作最后添加的边作为最先删除的边,并且最后被删除的边不能是本次基本操作曾经添加的边,在基本操作内搜索出可进行的2-opt、3-opt或4-opt操作进行航迹线优化,如果一次基本操作后,未搜索到合适的航迹点则停止搜索;从某航迹点出发经过任何基本操作都不能使航迹线优化,则进行一次非连续的、闭合的5-opt操作,由一次非闭合的2-opt操作和另外一次非闭合的2-opt操作或者3-opt操作组成,这被称为一次打断操作;判断经过一次打断操作后航迹线是否得到优化,若航迹线被优化,则继续进行基本操作优化航迹线,然后再进行打断操作,如此循环,直至两者都不能使航迹线优化,则称为完成一次迭代优化;然后,当航迹点重新选取后,再次进行航迹线的优化,两者重复进行,完成航迹线的迭代优化。9.根据权利要求1所述的一种面向风机叶片巡检的无人机自动航迹线规划方法,其特征在于,风机姿态的识别包括以下步骤:无人机根据所规划路径飞抵风机轮毂处,对风机进行拍照并传送至处理端进行处理,确认风机杆塔和风机叶片,识别风机叶片的顺桨停机位置,根据代表风机叶片边缘的直线
斜率获得风机叶片停机的偏转角度γ:其中,(x1,y1)、(x2,y2)分别为代表风机叶片的直线段两端的点的坐标,表示平均偏转角,α
i
表示代表风机叶片的每条直线的偏转角度,n为图像检测生成的代表风机叶片的直线的数量。10.根据权利要求1所述的一种面向风机叶片巡检的无人机自动航迹线规划方法,其特征在于,航迹线的调整步骤包括:风机叶片的结构相对固定,估计出风机叶片的偏转角度并用于无人机巡检风机航迹线的调整。在三维空间中,风机叶片所在面可视为z值固定的平面,风机旋转一定角度γ,则航迹点跟随旋转γ,可实现不同停机状态下的叶片巡检,按球坐标的表示规则,航迹点调整为:利用获取到的偏转角度对根据风机模型得到的基准路径数据进行变换,得到能够适应当前风机状态的路径数据,最后,无人机根据修正的路径数据进行自动巡检,完成叶片的巡检工作。
技术总结
本发明公开一种面向风机叶片巡检的无人机自动航迹线规划方法,包括以下步骤:建立风机模型,根据巡检要求将风机模型进行网格化处理,得到风机面图形学模型,在模型的每个网格面片的基础上规划候选航迹点区域,保证航迹点区域中选择出的航迹点至少可见一个完整的面片区域,保证获取完整的风机表面图像;基于候选航迹点区域进行航迹点采样,完成航迹点优化;完成航迹线规划;进行风机姿态的识别并完成航迹线的调整。本发明基于模型生成航迹路径规划,再根据现场风机信息进行调整,对硬件要求低,所规划路径可靠性高,鲁棒性强;利用机器视觉方法获取风机叶片的偏转角度,实现航迹规划的调整,使巡检时不需关注风机的停机角度问题,自动化水平高。自动化水平高。自动化水平高。
技术研发人员:曾凡春 麻红波 王晓宁 徐明寿 李涛 王宇
受保护的技术使用者:北京华能新锐控制技术有限公司
技术研发日:2022.06.14
技术公布日:2022/8/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。