1.本发明涉及电子技术和智能农业领域,涉及一种应用于大棚、园艺等领域的全自动无人值守多功能农业机器人。
背景技术:
2.随着互联网产业以及农业的日益发展,农业机械化、智能化发展是大势所趋。到2020年我国主要农作物耕种综合机械化水平超过65%,粮食作物生产基本实现机械化。针对现代农业生产中普遍存在的农药污染、土壤侵蚀和基因退化等问题,世界各国越来越重视现代农业的永续化和生态化,精准农业这一新的农业发展方向成为当今农业的热门话题。精准农业一般通过自动化方法对田间植物进行检测,并根据它们的标签和位置除草或施肥,自动调整局部生态环境,在尽量不使用化学制剂的前提下提高农业产量。但传统检测方法在部署前一般需要专业人员进行选型和调试,且无法同时满足精准农业高精度和低误苗率(将作物检测为杂草的概率)的需求。与其它发达国家相比,中国的耕地面积广、种类多且地形复杂,发展精准农业拥有一定的环境基础。甘肃具有独特的地形气候且机械化程度低,研究面向甘肃地理环境的小型无人除草与作物智能监测装备具有广阔的应用前景。
3.本发明基于甘肃省独有的地理环境提出,尝试设计一种可以与规模化农业机械互补的新式农耕设备,以期解决在大棚中大规模农业机械无法应用或效率低下的痛点。基于这些原因本发明主要针对解决小型化智能农业机械方面的相关难题,设计了一种适用于大棚中的多功能农业机器人,实现定位播种、精准除草、按需浇水撒药和收割作物等功能。
技术实现要素:
4.为解决上述技术问题,本发明提供一种小型全自动无人值守多功能大棚农业机器人。
5.其中,无线通讯模块,用于与终端设备,以及图像采集模块和传感器模块与终端的连接。
6.电源模块包括给can电机供电的12v电源,以及给树莓派、stm32供电的5v以及3v3电源,给水位传感器供电的太阳能电池板等。
7.传感器数据采集模块,由一系列传感器构成,与通信模块链接,用于采集各项数据并传递给终端设备进行分析,是否需要补水或者给药等。
8.图像识别模块,包括一个单目相机,用于识别植物位置,植物是否正在或将遭受虫害,以及植物处于何种生长阶段。
9.操作模块,与无线通讯模块连接,包括定点浇水的水枪,撒药的药箱,以及用于剪除杂草的机械臂。用于通过无线通讯模块接收终端设备发送的操作指示,根据所述操作指示对机械臂进行操作,并通过无线连接向终端设备发送操作结果信息。
10.本发明的构造流程为:农业机器人定时进入地里巡视,向终端传递收集到的信息,传感器模块收集植物生长的各项环境数据,图像采集模块收集植物生长数据,并将传感器
数据和图像采集模块数据传送给终端进行分析,继而给机械臂操作模块下达动作指令,完成指定功能。
11.本发明的效果为:
12.1、提供了一种全自动无人值守多功能大棚农业机器人方法,小巧灵活便于移动,以实现山地丘陵、梯田等地大型农机无法进入大棚作业的问题。
13.2、提供了一种全自动无人值守多功能大棚农业机器人方法,通过各模块协调作业,实现精准作业。
附图说明
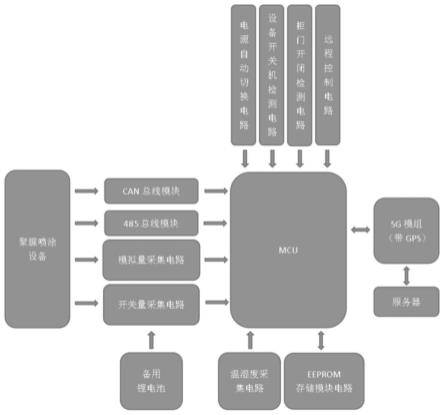
14.附图1为本发明提供的农业机器人的模块化系统示意图。图中包括终端处理设备,无线通讯模块,传感器模块,图像采集模块,操作模块,电源模块。
15.附图2为本发明提供的农业机器人的外部结构示意图。图中,1为3030工业铝型材四面凹槽框架,2为加宽稳固可适应多地形轮胎,3为三轴滑台,4为滑台电机,5为控制机器人行进的can电机,6为控制终端,7为图像采集单目相机,8为多功能机械臂,9为浇水给药通道。
具体实施方式
16.图2为本发明提供的农业机器人的结构示意图。如图2所示,农业机器人包括控制终端、三轴滑台、can电机、单目相机、以及多功能机械臂等组成部分。
17.控制终端,由stm32f7作为主控,连接树莓派4b,并通过树莓派pico控制下属各传感器模块,并将其数据传给k32w061。
18.其中结构方面,3030工业铝型材四面凹槽框架保证了机器人整体架构的稳定性,且便于在机器人上固定各个模块。加宽稳固可适应多地形轮胎保证了农业机器人在耕地中依然可以保持稳定。
19.三轴滑台可控制机械臂移动到需要操作的植物位置,并且辅助机械别的操作;也可以控制浇水撒药通道移动到其对应位置,实现精准浇水和给药。
20.无线通讯模块,包括wifi模块、蓝牙模块和thread网络等,用于与终端设备,以及图像采集模块、传感器模块和操作模块与终端的互相连接。
21.传感器模块包括环境温度传感器、空气湿度传感器、土壤湿度传感器、光照强度传感器、二氧化碳浓度传感器、水位传感器等。其中温湿度传感器、光照强度传感器、二氧化碳浓度传感器位于机器人上,对植物生长所处的环境温湿度、光照强度、二氧化碳浓度进行监测。土壤湿度传感器位于作物根系附近,并实时检测土壤湿度,判定植物是否缺水,若缺水,则机器人前往对应位置进行浇水。同时在水箱中设置了水箱水位传感器,判断水箱的水是否充足,若不足则及时为水箱加水。
22.图像识别模块,包括一个单目相机,用于识别植物位置,植物是否正在或将遭受虫害,以及植物处于何种生长阶段。为精准播种、浇水、施肥以及撒药提供了视野,并结合植物所处生长时期,确定其所需浇水施肥量,给作物提供最适宜的生长环境。
23.操作模块,与无线通讯模块连接,包括定点浇水的水枪,撒药的药箱,以及用于拔除杂草和收割作物的机械臂。通过无线通讯模块接收终端设备发送的操作指示,根据所述
操作指示对机械臂进行操作,当终端设备识别到杂草,会发出指令给机械臂拔除杂草,当终端设备判定植物缺水/缺少营养/正在遭受虫害,也会向操作模块发送指令,通过滑台调节机械臂的操作位置,以实现进行定点播种、浇水、给肥、撒药和收割的操作,并通过无线通讯模块向终端设备发送操作结果信息。
24.本发明中的小型农业机器人,可以通过传感器数据采集模块和图像采集模块收集到的信息分析环境和植物当前状态,并作出相应的操作,在实际操作中实现了去人工、去污染,实现了精准作业,满足了精准农业的高精度和低误苗率的要求。
25.多功能大棚机器人的具体操作流程如下:
26.1、规定时间让机器人在大棚的轨道上进行巡视。
27.2、巡视过程中检查大棚中的各个植物生长状态。
28.3、每隔一定时间收集传感器模块和图像识别模块的各项数据,分析环境数据。
29.4、依据收到的各项数据,对多功能农业机器人下达指令,使其前往指定地点执行指定动作。
技术特征:
1.一种全自动无人值守多功能大棚农业机器人,它包括终端设备、通信模块、电源模块、传感器数据采集模块、图像识别模块、机械臂操作模块,其特征在于:终端设备,用于分析各模块传回的数据,并下达指令使机器人行进,并使操作模块工作;无线通讯模块,用于与终端设备和其他模块之间建立无线连接;电源模块,与无线通讯模块、传感器模块和操作模块连接,用于为无线通讯模块、传感器模块和操作模块提供电源;传感器数据采集模块,用于收集植物生长环境的各项数据;图像识别模块,与终端设备连接,用于收集植物生长状态和健康状态,并传回中断进行分析;操作模块,与无线通讯模块连接,用于通过无线通讯模块连接接收终端设备发送的操作指示,并向终端设备发送操作结果信息;全自动无人值守,通过各个模块反馈协调作业,实现无人值守的精准农业。2.根据权利要求1所述的全自动无人值守多功能大棚农业机器人,其特征在于框架的稳定性,及其实用性,3030工业铝型材四面凹槽框架保证了机器人整体架构的稳定性,且便于在机器人上固定各个模块,可按照需求添加任意模块。3.根据权利要求1所述的全自动无人值守多功能大棚农业机器人,其特征在于三轴滑台可控制机械臂移动到西药操作的植物位置,并且辅助机械别的操作;也可以控制浇水撒药通道移动到其对应位置,实现精准浇水和给药。4.根据权利要求1所述的全自动无人值守多功能大棚农业机器人,其特征在于无线通讯模块,包括wifi模块、蓝牙模块、thread网络等,用于与终端设备,以及图像采集模块、传感器模块和操作模块与终端的互相连接。5.根据权利要求1所述的全自动无人值守多功能大棚农业机器人,其特征在于传感器模块,包括环境温度传感器、空气湿度传感器、土壤湿度传感器、光照强度传感器、二氧化碳浓度传感器、水位传感器等。其中温湿度传感器、光照强度传感器、二氧化碳浓度传感器位于机器人上,对植物生长所处的环境温湿度、光照强度、二氧化碳浓度进行监测。6.根据权利要求1所述的全自动无人值守多功能大棚农业机器人,其特征在于图像识别模块,包括一个单目相机,用于识别植物位置,植物是否正在或将遭受虫害,以及植物处于何种生长阶段;为精准播种、浇水、施肥以及撒药提供了视野,并结合植物所处生长时期,确定其所需浇水施肥量,给作物提供最适宜的生长环境。7.根据权利要求1所述的全自动无人值守多功能大棚农业机器人,其特征在于操作模块,包括定点浇水的水枪,撒药的药箱,以及用于拔除杂草的机械臂;通过无线通讯模块接收终端设备发送的操作指示,根据所述操作指示对机械臂进行操作,通过三轴滑台调节机械臂的操作位置,以实现进行定点浇水、给肥和撒药的操作,并通过无线通讯模块向终端设备发送操作结果信息。
技术总结
本发明提出了一种用于大棚的全自动无人值守多功能农业机器人解决办法,涉及电子技术和智能农业领域。主要包括,无线通讯模块、传感器数据采集模块、图像识别模块、操作模块。本发明实现了无人值守全自动智能农业机器人,定时进入地里巡视,向终端传递传感器模块收集的植物生长各项环境数据,以及图像采集模块收集的植物生长数据,并将传感器数据和图像采集模块数据传送给终端进行分析,继而给机械臂操作模块下达动作指令,完成指定功能。本发明中的小型农业机器人,可以通过分析环境和植物当前状态,实现精准作业,满足了精准农业的高精度和低误苗率的要求。低误苗率的要求。
技术研发人员:周庆国 陈越 苟煜春 姜雪涛 江梅雨 白鹏宇
受保护的技术使用者:兰州大学
技术研发日:2022.06.11
技术公布日:2022/8/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。