弯曲度可控的经桡脑血管介入导管及介入导管组件
【技术领域】
1.本技术涉及医疗器械领域,尤其是关于一种弯曲度可控的经桡脑血管介入导管及介入导管组件。
背景技术:
2.目前采用血管介入方式治疗颅内疾病采用的通路均为股动脉入路,即用穿刺针穿刺股动脉,插入导丝和穿刺鞘,然后通过各种通路导管建立从股动脉到颅内各血管分支的通路。但经股入路有一些不可克服的缺陷,穿刺点并发症较大,手术后病人卧床时间长,等等。而桡动脉入路作为治疗颅内血管疾病的一种方式,桡动脉位置浅表、内径细,穿刺术后容易找准动脉破口压迫止血。需要外科手术干预的穿刺点出血并发症率低至0.06%,相比于股动脉入路,经桡动脉入路介入治疗后患者舒适度较高,无需严格卧床制动,住院时间明显缩短,住院费用低,同时有降低相关并发症的优点。
3.医生在给病人进行造影或治疗时,通常需要将导管头端进入到颅内动脉各分支的开口处,分别对各分支打造影剂进行造影,观察病人血管的情况。由于各分支血管的分布不一样,单一形状的导管往往不能导入到所有需要导入的血管分支,从而医生需要将导管从血管中取出,更换另一根不同形状的导管,这不仅造成材料的浪费,还给医生手术过程造成麻烦,造成器械浪费并对病患造成多次创伤。
4.因此,有必要设计一种操作更灵活、符合不同手术需要、可以即时调节导管前端弯曲度的介入导管,可提高手术效率、减轻病人痛苦、减少并发症,提高手续效率、改善手术效果。
技术实现要素:
5.本技术的目的在于提供一种操作更灵活、符合不同手术需要、可以即时调节导管前端弯曲度的弯曲度可控的经桡脑血管介入导管及介入导管组件。
6.为实现本技术目的,提供以下技术方案:
7.本技术提供一种弯曲度可控的经桡脑血管介入导管,其包括管体和至少一根控制丝,所述管体包括至少一段管体分部,所述控制丝设于所述管体中,每根所述控制丝头端与一段所述管体分部连接,且所述控制丝其余部分可相对所述管体移动。
8.采用本技术技术方案,每一根控制丝都连接一段管体分部,可以通过牵引所述控制丝从而拉动所述管体分部,使其弯曲改变角度,由此实现在手术中的管体的位置、角度调控,使操作更灵活。
9.其中,所述管体本身在自然状态时的形状可为直态,也可为预塑型的弯曲态。
10.在一些实施方式中,可以只有一段管体分部和一根控制丝,所述控制丝的头端连接所述管体分部的头端(也就是管体头端),所述控制丝的尾端可以牵引操作,例如可以直接或通过介质件连接进行操作,或控制丝尾端连接一些可操作的调控件,操作所述调控件相对所述管体前后移动,可调控所述控制丝的运动,从而可带动所述管体分部的弯曲。所述
控制丝向尾端拉动距离越大,相当于将控制丝置于管体内的部分缩短,所述管体分部的头端也跟随着控制丝的移动而向管体尾端相应移动,也就是管体分部头端的弯曲越大,也就是管体头端弯曲度越大。相反操作时,操控所述控制丝将控制丝向外释放,也就是将所述控制丝置于管体内的部分变长,所述管体分部的头端也跟随着控制丝的移动而向外释放逐渐趋向于回复自然形态,相应的其弯曲度就越小,也就是所述管体头端弯曲度越小。因此,通过对管体的控制以及结合调控所述控制丝可以根据需要调控所述管体头端的弯曲度、朝向和位置。
11.在一些实施方式中,所述管体包括至少两段所述管体分部。在设有两段所述管体分部的实施方式中,分别为靠近管体头端的第一管体分部、与第一管体分部相连接的第二管体分部,所述控制丝设有至少两根,至少一根所述控制丝头端与所述第一管体分部连接,及至少一根所述控制丝头端与所述第二管体分部连接。在设有三段所述管体分部的实施方式中,包括靠近头端的第一管体分部、第二管体分部,以及与所述第二管体分部连接的第三管体分部,所述控制丝设有至少三根,分别至少有一根所述控制丝头端与所述第一管体分部、第二管体分部、第三管体分部连接。以此类推,在设有三段以上所述管体分部的实施方式中,后一段管体分部与前一段管体分部连接。所述控制丝数量与所述管体分部数量可以一致,也可以控制丝数量多于管体分部数量,一段管体分部由至少一根控制丝所连接控制;或者,接近头端的至少一根管体分部当中,每段管体分部由至少一根控制丝所连接控制,具体的,在接近尾端的管体分部可以有一段或两段不设置控制丝连接。
12.具体的实施方式中,在所述管体包括至少两段所述管体分部时,各管体分部之间的硬度不同,硬度变化从管体尾端向头端逐步减少。在一些具体实施方式中,在管体内有介入腔室,介入腔室内会设置导丝,导丝的硬度也有变化,相应的硬度变化从管体尾端向头端逐步减少。
13.在所述管体包括至少两段所述管体分部的一些实施例中,所述第一管体分部的长度为10-50mm,第二管体分部的长度为20-100mm。人体主动脉弓的血管直径一般在20-50毫米范围内,所述第一管体分部的长度取值范围便于在主动脉弓血管内能直接进入到不同的血管分支,所述第二管体分部的长度是根据主动脉弓上各分支血管开口的间距而定的,便于能在主动脉弓上超选。
14.在一些实施方式中,在管体内还设有至少一个调控腔,所述调控腔从所述管体尾端连通至所述至少一段管体分部头端,所述控制丝设置于所述调控腔内。在只有一根调控丝的实施例中,可以只设置一个调控腔容纳所述调控丝,所述调控腔贯通管体头端和尾端,所述控制丝头端连接一段所述管体分部的头端。在设有两根或以上的调控丝的实施例中,可以设置一个调控腔容纳所有调控丝,所述调控腔贯通管体头端和尾端,同时也就是所述调控腔贯通所有管体分部,所述控制丝设均置于所述调控腔内,每一根控制丝的头端分别连接一段管体分部头端。在一些具体实施方式中,也可以设置两个或以上的调控腔来容纳所述调控丝,所述调控腔的数量可以与调控丝的数量一致,也可以不一致。在所述调控腔的数量与所述调控丝数量一致的实施例中,每一根调控丝容置在不同的调控腔中,每个所述管体分部都设有一个从该管体分部的头端连通至尾端的所述调控腔,每一根控制丝的头端分别连接一段管体分部头端。在所述调控腔的数量与所述调控丝数量不一致的实施例中,每一个调控腔中可以容置一根或一根以上调控丝。
15.在具体实施方式中,所述介入腔室和所述调控腔的横截面形状可以是圆形、椭圆形、三角形、多边形,或其他几何形状,也可以是不规则的异形。
16.在具体实施方式中,所述控制丝为单根金属丝或非金属丝,或是包括多根金属丝或非金属丝缠绕而成的线缆。
17.本技术还提供一种介入导管组件,其包括如上所述弯曲度可控的经桡脑血管介入导管,以及调控机构,所述调控机构包括调控主体以及可相对调控主体移动的调控件,所述管体尾端与所述调控机构连接,所述控制丝的尾端连接所述调控件。
18.在一些实施方式中,所述调控件的数量与所述控制丝数量一致,每一根所述控制丝的头端分别连接一段管体分部的头端,每一根所述控制丝的尾端分别连接一个所述调控件,通过所述调控件对每一根控制丝单独控制,进而单独调控每一段管体分部。
19.在其他实施例中,也可以有至少一个调控件连接两根控制丝,对两段管体分部同时调控;或者,其中有至少一个调控件连接两根控制丝,这两个控制丝同时连接同一段管体分部,加强对同一段管体分部的调控力度;或者,每一个调控件分别连接一根控制丝,而有至少两根控制丝同时连接同一段管体分部头端的不同位置,通过不同角度对所述管体分部进行调控,由所述两根控制丝对所述管体分部施加不同角度的不同力度之间的平衡,进而实现符合预期的所述管体分部的头端弯曲度和角度。
20.在一些实施方式中,所述调控机构为操作手柄,所述调控本体为操作手柄本体,所述调控件是可以相对手柄本体滑动的推块,每一根所述控制丝的尾端(近端)固定于操作手柄的推块上,每一根所述控制丝的头端(远端)分别固定于(不同硬度)不同管体分部上。具体的,所述控制丝固定的方式包括但不限于熔接、粘接或焊接等不同方式;相对手柄本体滑动的推块可分别独立控制,且具有自锁或其他锁定装置;在一些具体实施方式中,控制丝的头端分别与不同硬度段的管体分部头端固定,控制丝的尾端与所述操作手柄连接,操作推块的运动可分别控制其对应的控制丝的运动,从而可带动不同硬度管体分部的弯曲。
21.在一些具体实施方式中,所述不同硬度管体分部彼此之间的对接方式可以是将需要对接的不同硬度导管的两端加热软化,在模具型腔内相互施加导管推力进行对接,不同硬度管体分部的材质可以采用塑料材质如pebax、ps、pa、pe、pvc等。
22.在一些具体实施方式中,所述调控机构还可以采用具备粗调和微调功效的调节结构。
23.对比现有技术,本技术具有以下优点:
24.采用本技术弯曲度可控的经桡脑血管介入导管,每一根控制丝都连接一段管体分部,可以通过牵引所述控制丝从而拉动所述管体分部,使其弯曲改变角度,由此实现在手术中的管体的位置、角度调控,使操作更灵活。本技术介入导管组件设置调控机构方便于牵引所述控制丝的操作。
【附图说明】
25.图1为本技术介入导管实施例一中第三管体分部截面示意图;
26.图2为本技术介入导管实施例一中第二管体分部截面示意图;
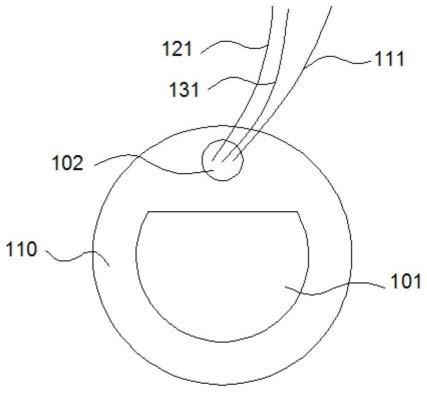
27.图3为本技术介入导管实施例一中第一管体分部截面示意图;
28.图4为本技术介入导管实施例一中第三管体分部纵向透视示意图;
29.图5为本技术介入导管实施例一中第二管体分部纵向透视示意图;
30.图6为本技术介入导管实施例一中第一管体分部纵向透视示意图;
31.图7为本技术介入导管组件实施例一的结构示意图;
32.图8为本技术介入导管实施例二中第三管体分部截面示意图;
33.图9为本技术介入导管实施例二中第二管体分部截面示意图;
34.图10为本技术介入导管实施例二中第一管体分部截面示意图;
35.图11是本技术介入导管实施例具体应用时原理示意图之一;
36.图12是本技术介入导管实施例具体应用时原理示意图之二;
37.图13是本技术介入导管实施例具体应用时原理示意图之三;
38.图14是本技术介入导管实施例具体应用时原理示意图之四;
39.图15是本技术介入导管实施例具体应用时原理示意图之五;
40.图16是本技术介入导管实施例具体应用时原理示意图之六;
41.图17是本技术介入导管实施例在介入血管时操作示意图之一;
42.图18是本技术介入导管实施例在介入血管时操作示意图之二;
43.图19是本技术介入导管实施例在介入血管时操作示意图之三。
【具体实施方式】
44.本技术中有关“第一”、“第二”、“第三”、“头端”、“尾端”等用语并不成为限定本技术技术方案的特征,仅用于区分各部件进行描述用。其中,“头端”在实施例描述中一般是指远离调控机构的方向的一端,其他用语也会称之为远端,“尾端”在实施例描述中一般是指靠近调控机构的方向的一端,其他用语也会称之为近端。
45.请参阅图1~7,本技术实施例一弯曲度可控的经桡脑血管介入导管及介入导管组件的相关示意图,所述介入导管包括管体100,所述管体100尾端连接调控机构200,所述调控机构200包括调控主体210以及可相对调控主体210移动的调控件,具体的,所述管体100尾端与调控主体210连接,管体100内设有控制丝,所述控制丝容置于所述管体100内的调控腔中,所述控制丝的尾段与所述调控机构200连接,头端与所述管体100的具体位置连接固定,控制丝的中间部分则可相对所述调控腔运动,因此,置于调控腔中的控制丝的部分的长短可变化。所述管体100本身在自然状态时的形状可为直态,也可为预塑型的弯曲态,在介入导管时,因应导管内情况,经由调控操作,结合对管体100的介入腔室101内的导丝(图未示)的调控配合,及采用本技术技术方案控制丝对导管各管体分部施加作用力使其弯曲,从而实现各种符合手术需求的精细调控。
46.在本实施例中,如图4~6所示,所述管体100设有三段管体分部,分别是靠近头端的第一管体分部130、与所述第一管体分部130连接的第二管体分部120,以及与所述第二管体分部120连接的第三管体分部110;以此类推,在设有三段以上所述管体分部的实施方式中,后一段管体分部与前一段管体分部连接。各管体分部之间的硬度不同,硬度变化从管体100尾端向头端逐步减少;介入腔室101内的导丝硬度也有变化,相应的硬度变化从管体100尾端向头端逐步减少。具体的,第一管体分部130的硬度比第二管体分部120的硬度小,第二管体分部120的硬度比第三管体分部110的硬度小;不同硬度的第一管体分部130、第二管体分部120、第三管体分部110之间通过将需要对接的不同硬度导管的两端加热软化,在模具
型腔内相互施加导管推力进行对接,不同硬度管体分部的材质可以采用塑料材质如pebax、ps、pa、pe、pvc等。
47.具体的,所述第一管体分部130的长度为10-50mm,第二管体分部120的长度为20-100mm。人体主动脉弓的血管直径一般在20-50毫米范围内,所述第一管体分部130的长度取值范围便于在主动脉弓血管内能直接进入到不同的血管分支,所述第二管体分部120的长度是根据主动脉弓上各分支血管开口的间距而定的,便于能在主动脉弓上超选。
48.请结合图7,所述控制丝数量与所述管体分部数量一致,包括头端分别连接第一管体分部130、第二管体分部120、第三管体分部110的第一控制丝131、第二控制丝121、第三控制丝111,每根控制丝的尾端均连接所述调控机构200上的调控件。所述调控件的数量与所述控制丝数量一致,包括分别连接第一控制丝131、第二控制丝121、第三控制丝111的尾端的第一调控件213、第二调控件212、第三调控件211,通过所述调控件对每一根控制丝单独控制,进而单独调控每一段管体分部的弯曲状态。每根控制丝头端与对应的管体分部头端固定连接,具体的,所述控制丝固定的方式包括但不限于熔接、粘接或焊接等不同方式;具体的,第一控制丝131头端与第一管体分部130头端固定连接,连接处如图6所示第一熔接点132,第二控制丝121头端与第二管体分部120头端固定连接,连接处如图5所示第二熔接点122,第三控制丝111头端与第三管体分部110头端固定连接,连接处如图4所示第三熔接点112。
49.所述第一调控件213、第二调控件212、第三调控件211设置在调控主体210上以及可相对调控主体210滑动,具体可以设置成沿着所述调控主体210上纵向设置的滑槽相对前后滑动的推块,通过第一调控件213、第二调控件212、第三调控件211的滑动操作,来分别牵引所述第一控制丝131、第二控制丝121、第三控制丝111,从而可带动所述第一管体分部130、第二管体分部120、第三管体分部110的头端,使其弯曲改变角度,由此实现在手术中的管体100的位置、角度调控,使操作更灵活。所述控制丝向头端拉动距离越大,相当于将控制丝置于管体100内的部分缩短,所述管体分部的头端也跟随着控制丝的移动而向管体100头端相应移动,也就是管体分部头端的弯曲越大,也就是管体100头端弯曲度越大。相反操作时,移动调控件将控制丝向外释放,也就是将所述控制丝置于管体100内的部分变长,所述管体分部的头端也跟随着控制丝的移动而向外释放逐渐趋向于原自然形态,相应的其弯曲度就越小,也就是所述管体100头端弯曲度越小。因此,通过对管体100的控制以及结合调控所述控制丝可以根据需要调控所述管体100头端的弯曲度、朝向和位置。所述调控主体210带有鲁尔接头。
50.在本实施例中,所述调控腔的数量为一,如图1~3所示,所述调控腔102贯通管体100头端和尾端,也就是所述调控腔102贯通第一管体分部130、第二管体分部120、第三管体分部110。所述调控腔102可容纳所述第一控制丝131、第二控制丝121、第三控制丝111,具体的,所述第一控制丝131尾端连接所述调控机构200上的第一调控件213,第一控制丝131的中间部分经过第一管体分部130、第二管体分部120、第三管体分部110中相连通的所述调控腔102,第一控制丝131的头端与第一管体分部130的头端连接固定。所述第二控制丝121尾端连接所述调控机构200上的第二调控件212,第二控制丝121的中间部分经过第二管体分部120、第三管体分部110中相连通的所述调控腔102,第二控制丝121的头端与第二管体分部120的头端连接固定。所述第三控制丝111尾端连接所述调控机构200上的第三调控件
211,第三控制丝111的中间部分经过第三管体分部110中的所述调控腔102,第三控制丝111的头端与第三管体分部110的头端连接固定。
51.请参阅图8~10,在实施例二中,所述调控腔的数量与调控丝的数量一致,每一根调控丝容置在不同的调控腔中,每个所述管体分部都设有一个从该管体分部的头端连通至尾端的所述调控腔,每一根控制丝的头端分别连接一段管体分部头端。具体的,与调控丝的数量一致的调控腔包括第一调控腔105、第二调控腔104、第三调控腔103,所述第一调控腔105贯通所述第一管体分部130、第二管体分部120、第三管体分部110,所述第二调控腔104贯通所述第一管体分部130、第二管体分部120,第三调控腔103贯通所述第一管体分部130。所述第一控制丝131设置在所述第一调控腔105,其尾端连接所述调控机构200上的第一调控件213,第一控制丝131的中间部分经过第一管体分部130、第二管体分部120、第三管体分部110中相连通的所述第一调控腔105,第一控制丝131的头端与第一管体分部130的头端连接固定。所述第二控制丝121设置在所述第二调控腔104,其尾端连接所述调控机构200上的第二调控件212,第二控制丝121的中间部分经过第二管体分部120、第三管体分部110中相连通的所述第二调控腔104,第二控制丝121的头端与第二管体分部120的头端连接固定。第三控制丝111设置在所述第三调控腔103,其尾端连接所述调控机构200上的第三调控件211,第二控制丝121的中间部分经过第三管体分部110中相连通的所述第三调控腔103,第三控制丝111的头端与第三管体分部110的头端连接固定。
52.请参阅图11~19,通过对不同控制点的控制改变介入导管的管体头端形状,使得一根导管适应多种弓型及针对不同动脉进行造影检查。以三段管体分部的实施方式为例进行说明,第一管体分部130、第二管体分部120、第三管体分部110三段不同硬度的管体分部,各段管体分部的头端分别与第一控制丝131、第二控制丝121、第三控制丝111的头端固定连接,各根控制丝尾端分别连接一个调控件,每个调控件单独控制一根控制丝。
53.如图12所示,导管处于自由平直状态,图为只拉动与管体头端最软段第一管体分部130连接固定的第一控制丝131,第二管体分部120、第三管体分部110仍为平直状态,第一管体分部130被第一控制丝131拉动后弯成一定角度,第一管体分部130的长度为10-50mm之间,拉动第一控制丝131后,能弯曲的角度在0-180
°
之间,调控件向尾端拉动第一控制丝131的距离越长,第一管体分部130弯曲的角度越大,手术时可根据需要调节头端弯曲的角度。
54.图13为只拉动第二控制丝121时导管的状态,此时,通过拉动第二控制丝121拉动了第二管体分部120,使第二管体分部120单独弯曲,第一管体分部130、第三管体分部110仍保持其平直状态。
55.图14为同时拉动第一控制丝131、第二控制丝121时导管的状态,此时,通过拉动第二控制丝121拉动了第二管体分部120,使第二管体分部120弯曲,同时,通过拉动第一控制丝131拉动了第一管体分部130,使一管体分部130弯曲,同时拉动两根控制丝,使导管能处于更复杂的弯曲状态。
56.图15为只拉动第三控制丝111时导管的状态,此时,通过拉动第三控制丝111拉动第三管体分部110,使第三管体分部110弯曲,第一管体分部130、第二管体分部120由于第三管体分部110的弯曲也部分向上翘起。
57.图16为同时拉动第一控制丝131、第三控制丝111时导管的状态,此时,通过拉动第三控制丝111拉动第三管体分部110,使第三管体分部110弯曲,由于第三管体分部110硬度
较高,故弯曲状态相对没那么明显,控制线3拉动多腔管3,使多腔管3弯曲。同时拉动两根控制丝,使导管能处于更复杂的弯曲状态。
58.如图17所示,从左锁骨下动脉超选进入左椎和左颈动脉时,导管达到合适位置后,拉动第一控制丝131,第一控制丝131拉力作用于a处,则可轻松改变导管头端的形状,使导管头端朝向相应的血管开口,使导管可方便地进入相应的分支血管。
59.如图18所示,当导管需要从右锁骨动脉超选到左颈总动脉时,导管进入到主动脉弓时需有一个弯曲角度,同时,从主动脉弓转到左颈总动脉也需要一个弯曲角度,因此,采用该导管,可以先拉动第二控制丝121,拉力作用于b处,使导管顺利地进入主动脉弓,然后合理地拉动第一控制丝131,拉力作用于a处,使导管做二次弯曲,使导管头端顺利朝向左颈总动脉开口处。
60.如图19所示,当导管需要从右锁骨动脉超选到左锁骨下动脉时,导管进入到主动脉弓时需有一个弯曲角度,同时,右锁骨下动脉到左锁骨下动脉在主动脉弓内有一段距离,通过拉动第二控制丝121、第三控制丝111,拉力作用于b、c处,让一段长度的导管整体朝向上,然后通过拉动第一控制丝131可使导管的头端尽量朝向左锁骨下动脉的开口处。多点的协调弯曲可使导管呈现大跨度的准确弯曲,顺利实现导管对各血管分支的超选。
61.本方法提高了导管的适应性,降低了导管选择的容错率,减少了导管交换的可能,对手术进行提供了便利性。
62.以上所述仅为本技术的较佳实施例,本技术的保护范围并不局限于此,任何基于本技术技术方案上的等效变换均属于本技术保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
