1.本发明涉及一种可以在极限位置实现运动自锁的动臂结构。
背景技术:
2.原有挖掘装载机,挖掘装置动臂油缸,在行驶过程中,由于阀体的内漏,导致动臂油缸缓慢伸出,致使挖掘装置动臂下掉,不做处理可能会下掉至地面,使装备行驶发生危险。发生这种问题的原因在于挖掘装置的动臂在收起过程中不能收缩至“死点”之后,“死点”位置是指动臂油缸上下两个铰点及动臂下铰点处于一条直线时的位置,此时动臂油缸的伸缩都不再其作用,所以一般挖掘机在设计时动臂收起位置都不会达到死点位置,这种情况下动臂的位置保持就依赖于动臂油缸,而不管任何油缸都不能实现完全密封,表现为动臂下掉。
技术实现要素:
3.本发明所要解决的技术问题:针对现有的动臂运动的设计无法绕过死点的问题,提供了一种可以绕过死点的动臂运动机构,将这种机构运用在挖掘机工作装置上可以实现动臂的运动自锁。
4.为实现上述目的,本发明采用如下技术方案:
5.一种动臂自锁机构,包括安装座、动臂和伸缩臂,动臂和伸缩臂的下端分别铰装在安装座上不同位置的a、b两个铰点,a点在前,b点在后,伸缩臂上端与动臂上的铰点d铰接,伸缩臂的伸缩会改变铰点d的空间位置,当a、b、d三点运动至同一直线时,动臂在重力作用下具有向后转动的趋势。
6.当a、b、d三点运动至同一直线时铰点d的位置称为死点e,铰点d到达死点e后动臂向后转动直至到达锁止点f。
7.动臂上端铰装第二动臂,动臂和第二动臂之间安装有第二伸缩臂,第二伸缩臂可以调节动臂和第二动臂之间的夹角,当abd三点运动至同一直线时,若动臂和第二动臂的夹角小于一定值x则动臂因重力具有向后转动的趋势,当铰点d位于锁止点f时,张开第二动臂至一定位置y时动臂因重力具有向前转动的趋势。
8.角x等于或略大于动臂和第二动臂夹角所能达到的最小值。
9.位置y为水平位置或接近水平水平位置。
10.第二动臂上安装有第三动臂和第三伸缩臂。
11.所述伸缩臂为油缸。
12.本动臂自锁机构应在挖掘机的工作装置上,挖掘机的动臂2和动臂油缸3下端分别固定在铰点a、b上,动臂油缸3上端铰装在动臂2上,铰点为d。
13.动臂2采用半封闭结构形式,背部留出足够空腔,满足跨越死点的运动空间。
14.动臂2上安装有斗杆总成4,斗杆总成上安装有铲斗总成5。
15.动臂2背面空腔内安装有减震胶垫6。
16.动臂2的自锁过程为:将斗杆总成4和铲斗总成5收起,控制动臂油缸3收缩动臂2至死点位置,此时在重力的作用下动臂2转过死点,动臂油缸3继续收缩直至锁止位置。
17.动臂2的解锁过程为:首先展开斗杆总成4和铲斗总成5,然后控制动臂油缸3收缩至死点位置,在重力的作用下动臂2转过死点。
18.本发明的有益效果:
19.突破动臂运动机构自身结构的工作死点,反向利用动臂油缸的下掉,达到动臂自锁的目的。
20.只需改变油缸的安装距,不用做很大的结构形式调整,并且生产加工方便,简单实用。
附图说明
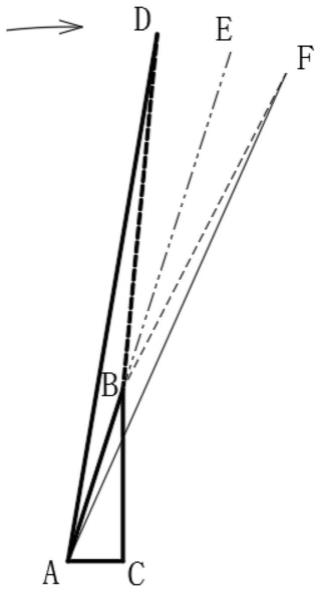
21.图1是实施例1的运动原理简图。
22.图2是实施例2的锁止原理简图。
23.图3是实施例2的解锁原理简图。
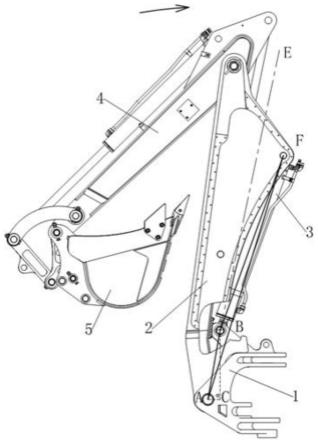
24.图4是实施例3中挖掘机工作装置结构示意图。
25.图5是实施例3中动臂背面的结构示意图
26.图6是动臂运动示意图。
27.图7是动臂死点示意图。
28.图8是动臂自锁示意图。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
30.实施例1:
31.如图1,三角形abc为动臂安装座,a点为动臂根部的铰接点,b点为动臂油缸缸筒铰接点;用动臂铰点连线ad表示动臂,用油缸铰点连线bd表示动臂油缸;d点为动臂与动臂油缸活塞杆的铰接点。e位置为死点位置,f位置为自锁位置。通过动臂油缸bd的伸缩可带动动臂ad上下旋转,直到死点位置。
32.在ae线左侧区域,动臂油缸bd收缩,动臂ad向上旋转,逐渐接近be线,此时db《ad-ab;在此区域内,当油缸下掉bd伸长时,动臂ad会向左侧旋转,表现为动臂下掉。
33.在ae线上时,bd与ad重合,动臂ad经过死点,此时be=ad-ab;一般的挖掘装置都会避免经过此死点,本发明则需要越过此死点。
34.在ae线右侧区域,动臂油缸bd可进行少量的收缩,最终达到安装距尺寸,此时db《ad-ab;在此区域内,当油缸下掉bd伸长时,动臂ad会向右侧旋转,直到动臂限定位置,此时,动臂不再移动,达到了限位自锁的目的。
35.实施例2:
36.如图2,三角形abc为动臂安装座,a点为动臂根部的铰接点,b点为动臂油缸缸筒铰接点;用动臂铰点连线ad表示动臂,用油缸铰点连线bd表示动臂油缸;d点为动臂与动臂油缸活塞杆的铰接点。e位置为死点位置,f位置为自锁位置。通过动臂油缸bd的伸缩可带动动
臂ad上下旋转,直到死点位置。动臂上铰装第二动臂,动臂和第二动臂之间安装有第二伸缩臂,第二伸缩臂可以调节动臂和第二动臂之间的夹角,当abd三点运动至同一直线时,若动臂和第二动臂的夹角小于一定值x则动臂因重力具有向后转动的趋势,角x等于或略大于动臂和第二动臂夹角所能达到的最小值。
37.当铰点d位于锁止点f时,张开第二动臂至一定位置y时动臂因重力具有向前转动的趋势。位置y为水平位置或近似水平的位置。
38.进一步的可以在第二动臂上安装其他机构,例如第三动臂和第三伸缩臂。伸缩臂一般为油缸结构,也可以是蜗杆结构或其他可以改变轴向长度的机构。
39.实施例3:
40.本实施例是在挖掘装载机的工作装置上的应用,工作装置的动臂2和动臂油缸3下端分别固定在铰点a、b上,动臂油缸3上端铰装在动臂2上,铰点为d。
41.动臂2采用半封闭结构形式,背部留出足够空腔,满足跨越死点的运动空间。动臂的长度与工作范围进行匹配确定,动臂油缸铰点位置的布置满足最大挖掘深度和油缸最小安装距的要求;动臂2背面空腔内安装有减震胶垫6,减震胶垫6通过垫片7和螺栓8进行固定,减轻动臂2和转臂1的上铰接点限位面撞击。动臂2上安装有斗杆总成4,斗杆总成上安装有铲斗总成5。
42.动臂油缸3位于ae线左侧时,因阀体内漏导致动臂油缸3伸出,动臂2会进行逆时针转动,长时间会导致铲斗5着地,行驶过程中导致危险。动臂油缸3与ae线重合时,动臂油缸3经过死点,此时,动臂油缸3伸出和收回皆无效,若无外力加入,动臂2不会动作;动臂油缸3位于ae线右侧时,动臂2越过死点,因阀体内漏导致动臂油缸3伸出,动臂2会进行顺时针转动,当动臂2上的减震胶垫6转到转臂1上铰点外缘限位面时,动臂2转动受限不再转动,到达自锁的目的。
43.动臂2的自锁过程为:将斗杆总成4和铲斗总成5收起,控制动臂油缸3收缩动臂2至死点位置,此时在重力的作用下动臂2转过死点,动臂油缸3从收缩转为伸长直至锁止位置。
44.动臂2的解锁过程为:首先展开斗杆总成4和铲斗总成5,然后控制动臂油缸3收缩至死点位置,在重力的作用下动臂2转过死点。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。