1.本实用新型涉及工业机器人技术领域,具体是一种工业机器人用卡爪。
背景技术:
2.工业机器人被广泛应用在制造生产的工业中,工业机器人具有高效工作的特点,可以节约大量的劳动力,且工作时具有高耐用性、高速度和高精度的特点。现有的工业机器人用卡爪在对不同形状的物品进行夹持时,难以稳定夹持。
技术实现要素:
3.本实用新型的目的在于提供一种工业机器人用卡爪,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:
5.一种工业机器人用卡爪,包括环形盘和夹持块,所述环形盘内侧设有空腔,还包括:
6.齿轮,所述齿轮通过其中部固定连接有支撑轴设于所述环形盘的空腔内,所述齿轮呈圆周阵列分布,其中一个齿轮固定连接的支撑轴一端与电机连接;
7.齿环,所述齿环滑动支撑设于所述环形盘的空腔内,且所述齿轮与所述齿环啮合;
8.驱动杆,所述齿轮的端面偏心处分别与驱动杆的一端活动连接;
9.缓冲筒,所述缓冲筒的一端与所述驱动杆的另一端活动连接,所述缓冲筒另一端滑动穿过所述环形盘的壳壁;
10.缓冲组件一,所述夹持块与所述缓冲筒之间通过缓冲组件一连接;
11.缓冲组件二,所述夹持块的夹持端一侧设有缓冲组件二。
12.作为本实用新型进一步的方案:所述缓冲组件一包括:
13.缓冲杆,所述缓冲杆一端滑动穿插设在所述缓冲筒内;
14.滑块,所述滑块滑动设于所述缓冲筒内,且与所述缓冲杆的插入端连接;
15.弹簧一,所述弹簧一设于所述缓冲筒内,且所述弹簧一的两端分别与所述缓冲筒内壁和滑块连接。
16.作为本实用新型进一步的方案:所述夹持块的夹持端设有缓冲腔,所述缓冲组件二包括:
17.缓冲块,所述缓冲块滑动设于所述夹持块的缓冲腔内;
18.弹簧二,所述弹簧二处于所述缓冲腔内,所述弹簧二的两端分别与所述缓冲块和夹持块内壁连接。
19.作为本实用新型进一步的方案:所述缓冲块的夹持端设有缓冲组件三。
20.作为本实用新型进一步的方案:所述缓冲块内设有夹持腔,所述缓冲组件三包括:
21.转动板,所述转动板对称设于所述缓冲块的夹持腔内,且所述转动板的一端与所述缓冲块内壁活动连接;
22.橡胶垫,所述橡胶垫固定设于所述转动板的夹持端;
23.弹簧三,所述弹簧三设于所述夹持腔内,所述弹簧三的两端分别与所述缓冲块内壁和转动板连接。
24.与现有技术相比,本实用新型的有益效果是:操作简单,实用性强,本实用新型可对不同形状的工件进行夹持,通过设有齿轮、齿环、驱动杆和缓冲筒可带动所述夹持块对工件进行夹持固定,通过设有缓冲组件一和缓冲组件二可对工件进行缓冲夹持,通过设有缓冲组件三便于对工件的拐角处进行稳定的夹持固定。
附图说明
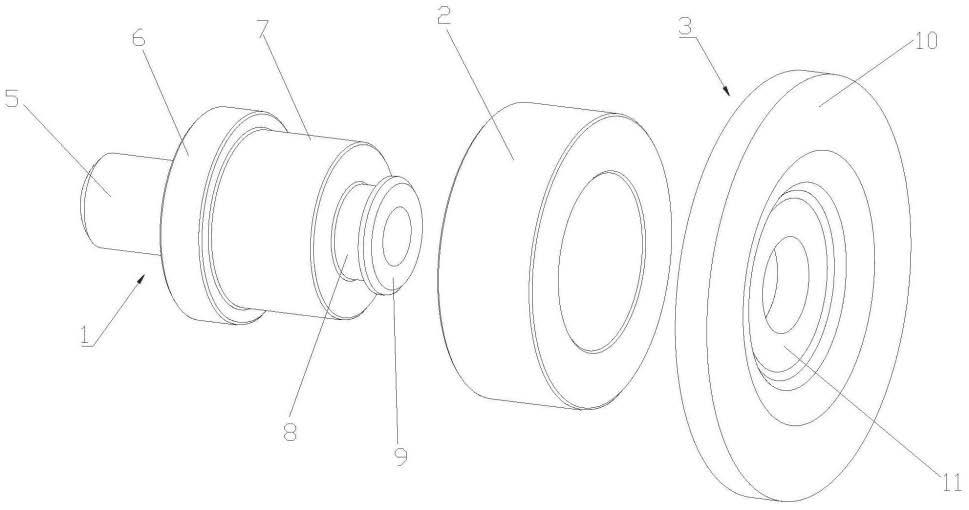
25.图1为一种工业机器人用卡爪的结构示意图。
26.图2为图1中a处局部放大图。
27.图3为图2中b处局部放大图。
28.附图标记注释:1-环形盘、2-齿轮、3-齿环、4-支撑轴、5-驱动杆、6-缓冲筒、7-弹簧一、8-滑块、9-缓冲杆、10-夹持块、12-缓冲块、13-弹簧二、14-橡胶垫、15-转动板、16-弹簧三。
具体实施方式
29.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
30.作为本实用新型的一种实施例,请参阅图1至图2:一种工业机器人用卡爪,包括环形盘1和夹持块10,所述环形盘1内侧设有空腔,还包括:
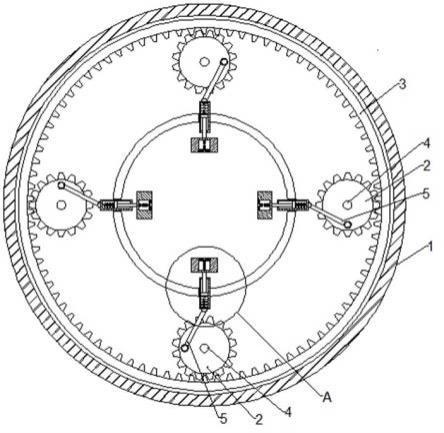
31.齿轮2,所述齿轮2通过其中部固定连接有支撑轴4设于所述环形盘1的空腔内,所述齿轮2呈圆周阵列分布,其中一个齿轮2固定连接的支撑轴4一端与电机连接(电机在图中未示出);
32.齿环3,所述齿环3滑动支撑设于所述环形盘1的空腔内,且所述齿轮2与所述齿环3啮合;
33.驱动杆5,所述齿轮2的端面偏心处分别与驱动杆5的一端活动连接;
34.缓冲筒6,所述缓冲筒6的一端与所述驱动杆5的另一端活动连接,所述缓冲筒6另一端滑动穿过所述环形盘1的壳壁;
35.缓冲组件一,所述夹持块10与所述缓冲筒6之间通过缓冲组件一连接;
36.缓冲组件二,所述夹持块10的夹持端一侧设有缓冲组件二。
37.所述电机带动一个齿轮2转动,所述齿轮2带动齿环3转动,所述齿环3进一步带动所有齿轮2转动,所述齿轮2带动驱动杆5移动,所述驱动杆5进一步带动缓冲筒6相对于圆心处移动,所述缓冲筒6带动夹持块10对工件进行夹持固定,通过设有缓冲组件一和缓冲组件二可进行缓冲夹持。
38.作为本实用新型的一种实施例,请参阅图1至图2:所述缓冲组件一包括:
39.缓冲杆9,所述缓冲杆9一端滑动穿插设在所述缓冲筒6内;
40.滑块8,所述滑块8滑动设于所述缓冲筒6内,且与所述缓冲杆9的插入端连接;
41.弹簧一7,所述弹簧一7设于所述缓冲筒6内,且所述弹簧一7的两端分别与所述缓冲筒6内壁和滑块8连接。
42.所述缓冲组件一可对所述夹持块10进行缓冲,利于对不同尺寸的工件进行夹持。
43.作为本实用新型的一种实施例,请参阅图2:所述夹持块10的夹持端设有缓冲腔,所述缓冲组件二包括:
44.缓冲块12,所述缓冲块12滑动设于所述夹持块10的缓冲腔内;
45.弹簧二13,所述弹簧二13处于所述缓冲腔内,所述弹簧二13的两端分别与所述缓冲块12和夹持块10内壁连接。
46.通过设有缓冲组件二可对待夹持工件的拐角进行夹持,利于稳定夹持。
47.作为本实用新型的一种实施例,请参阅图2至图3:所述缓冲块12的夹持端设有缓冲组件三。所述缓冲块12内设有夹持腔,所述缓冲组件三包括:
48.转动板15,所述转动板15对称设于所述缓冲块12的夹持腔内,且所述转动板15的一端与所述缓冲块12内壁活动连接;
49.橡胶垫14,所述橡胶垫14固定设于所述转动板15的夹持端;
50.弹簧三16,所述弹簧三16设于所述夹持腔内,所述弹簧三16的两端分别与所述缓冲块12内壁和转动板15连接。
51.当对待夹持工件的拐角进行夹持时,通过所述弹簧三16可驱动所述橡胶垫14和转动板15对工件拐角处进行有效稳定的夹持。
52.工作原理:所述电机带动一个齿轮2转动,所述齿轮2带动齿环3转动,所述齿环3进一步带动所有齿轮2转动,所述齿轮2带动驱动杆5移动,所述驱动杆5进一步带动缓冲筒6相对于圆心处移动,所述缓冲筒6带动夹持块10对工件进行夹持固定,通过设有缓冲组件一和缓冲组件二可进行缓冲夹持,当对待夹持工件的拐角进行夹持时,通过所述弹簧三16可驱动所述橡胶垫14和转动板15对工件拐角处进行有效稳定的夹持。
技术特征:
1.一种工业机器人用卡爪,包括环形盘和夹持块,其特征在于,所述环形盘内侧设有空腔,还包括:齿轮,所述齿轮通过其中部固定连接有支撑轴设于所述环形盘的空腔内,所述齿轮呈圆周阵列分布,其中一个齿轮固定连接的支撑轴一端与电机连接;齿环,所述齿环滑动支撑设于所述环形盘的空腔内,且所述齿轮与所述齿环啮合;驱动杆,所述齿轮的端面偏心处分别与驱动杆的一端活动连接;缓冲筒,所述缓冲筒的一端与所述驱动杆的另一端活动连接,所述缓冲筒另一端滑动穿过所述环形盘的壳壁;缓冲组件一,所述夹持块与所述缓冲筒之间通过缓冲组件一连接;缓冲组件二,所述夹持块的夹持端一侧设有缓冲组件二。2.根据权利要求1所述的一种工业机器人用卡爪,其特征在于,所述缓冲组件一包括:缓冲杆,所述缓冲杆一端滑动穿插设在所述缓冲筒内;滑块,所述滑块滑动设于所述缓冲筒内,且与所述缓冲杆的插入端连接;弹簧一,所述弹簧一设于所述缓冲筒内,且所述弹簧一的两端分别与所述缓冲筒内壁和滑块连接。3.根据权利要求2所述的一种工业机器人用卡爪,其特征在于,所述夹持块的夹持端设有缓冲腔,所述缓冲组件二包括:缓冲块,所述缓冲块滑动设于所述夹持块的缓冲腔内;弹簧二,所述弹簧二处于所述缓冲腔内,所述弹簧二的两端分别与所述缓冲块和夹持块内壁连接。4.根据权利要求3所述的一种工业机器人用卡爪,其特征在于,所述缓冲块的夹持端设有缓冲组件三。5.根据权利要求3所述的一种工业机器人用卡爪,其特征在于,所述缓冲块内设有夹持腔,所述缓冲组件三包括:转动板,所述转动板对称设于所述缓冲块的夹持腔内,且所述转动板的一端与所述缓冲块内壁活动连接;橡胶垫,所述橡胶垫固定设于所述转动板的夹持端;弹簧三,所述弹簧三设于所述夹持腔内,所述弹簧三的两端分别与所述缓冲块内壁和转动板连接。
技术总结
本实用新型公开了一种工业机器人用卡爪,属于工业机器人技术领域,包括环形盘和夹持块,所述环形盘内侧设有空腔,还包括:齿轮、齿环、驱动杆、缓冲筒、缓冲组件一、缓冲组件二、缓冲组件三;本实用新型可对不同形状的工件进行夹持,通过设有齿轮、齿环、驱动杆和缓冲筒可带动所述夹持块对工件进行夹持固定,通过设有缓冲组件一和缓冲组件二可对工件进行缓冲夹持,通过设有缓冲组件三可对工件的拐角处进行稳定夹持;解决了现有工业机器人用卡爪难以对不同形状的物品进行稳定夹持。同形状的物品进行稳定夹持。同形状的物品进行稳定夹持。
技术研发人员:段晨旭 申勤
受保护的技术使用者:四川大学锦江学院
技术研发日:2022.02.08
技术公布日:2022/8/11
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。