1.本实用新型属于轮胎制造领域,特别涉及一种锭子房中多个锭子全方位自动装配设备。
背景技术:
2.在轮胎制造过程中,钢丝帘布的质量影响到胎面稳定能力,承受载荷能力、限制变形能力以及行驶安全等各项指标。而钢丝帘线作为帘布的骨架材料,表面镀有一层黄铜镀层,为了确保帘布的质量,钢丝帘线必须缠绕在锭子上,并由人工或者机器辅助锭子上架,以保证不使锭子掉落并且钢丝帘线上无杂质。
3.但是锭子房中要保证温度高于室温5℃环境中,工作环境温度造成工人额外负担。并且单个锭子重量40-55kg,人工更换锭子耗费大量时间,工人劳动强度大生产效率低下,造成大量的人工成本。机器辅助作业目前一般采用抓手或者吸盘方式安装锭子,但由于抓手或者吸盘的抓力或者吸力不足等问题,容易造成锭子脱落,存在安全隐患。
4.无论是人工更换还是机器辅助更换锭子都只能同时操控单个锭子上架,因此现有技术仍需进一步发展和改进。
技术实现要素:
5.为解决背景技术中提到的缺陷,本实用新型展示了一种锭子房中多个锭子全方位自动装配设备。可替代人工操作,大大降低工人劳动强度,可以操控多个锭子同时上架提高工作效率,大幅降低企业的生产成本的锭子自动上架设备。
6.为实现上述目的,现提供技术方案如下:
7.一种锭子房中多个锭子全方位自动装配设备,平台上部设置有竖梁,横梁设置在竖梁上,通过竖梁上的直线模组实现横梁升降;横梁与竖梁之间还设置有角度调节结构;若干个锭子支架设置在横梁上,通过横梁上的直线模组实现锭子支架左右移动。
8.进一步的,所述平台上设置有配重。
9.进一步的,所述竖梁通过支架固定在平台上。
10.进一步的,所述平台下部设置有万向轮。
11.进一步的,所述角度调节结构设置为锥齿轮组,并通过电机三带动锥齿轮旋转。
12.进一步的,所述竖梁的直线模组设置有电机一带动,横梁的直线模组设置有电机二带动。
13.进一步的,所述锭子支架包括底座、磁吸十字推爪、支柱和定位器,所述底座的两侧设置有卡盘,卡盘卡在横梁上,横梁内部设置有直线模组,带动底座左右移动,支柱固定在底座上,磁吸十字推爪套在支柱底部,定位器安装在支柱的端部。
14.本实用新型的有益效果:
15.1、本实用新型采用机器设备实现锭子自动装配,解放人工操作,大大降低工人工作强度,提高工作效率,节省企业成本,为实现无人化工厂做准备。
16.2、本实用新型采用支柱支撑锭子,解决了抓手和吸盘存在的抓力或吸力不足时锭子脱落的情况,解除安全隐患提高工作安全系数,避免锭子脱落造成钢丝污染的经济损失。
17.3、本实用新型采用磁吸十字推爪确保锭子在装配过程中稳定性,避免脱落。
18.4、本实用新型采用旋转控制装置,实现多角度全方位操控锭子进行装配,大大提高了锭子在装配过程中的可操作性和灵活性。
19.5、本实用新型采用多个锭子支架装置,实现同时操控多个锭子进行装配,成倍提高了工作效率。
附图说明
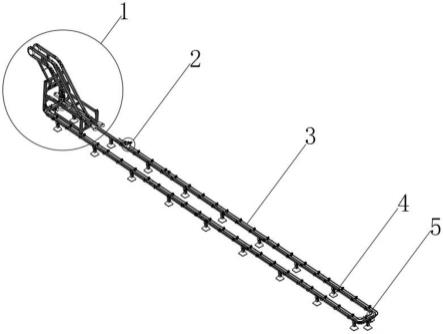
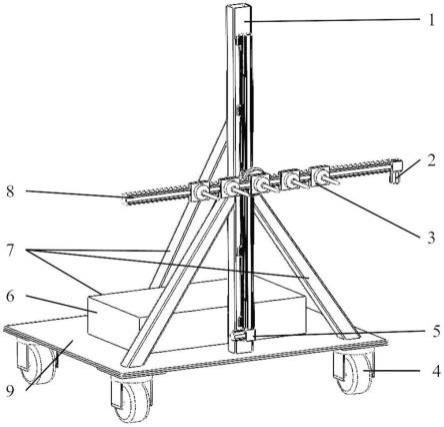
20.图1为一种锭子房中多个锭子全方位自动装配设备的立体图;
21.图2为一种锭子房中多个锭子全方位自动装配设备的竖梁和横梁结构图;
22.图3为一种锭子房中多个锭子全方位自动装配设备的锭子支架结构图;
23.图4为一种锭子房中多个锭子全方位自动装配设备的锥齿轮组结构图;
24.图5为一种锭子房中多个锭子全方位自动装配设备的磁吸十字推爪结构图;
25.其中:1、竖梁;2、电机二;3、锭子支架;4、万向轮;5、电机一;6、配重;7、支架;8、横梁;9、平台;10、锥齿轮组;11、电机三;12、卡盘一;13、底座一;14、底座二;15、磁吸十字推爪;16、支柱;17、定位器;18、卡盘二;19、吸附装置。
具体实施方式
26.为使本领域技术人员更加清楚和明确本实用新型技术方案,下面结合附图对本实用新型技术方案进行详细描述,但本实用新型的实施方式不限于此。
27.一种锭子房中多个锭子全方位自动装配设备,平台9上部设置有竖梁1,横梁8设置在竖梁1上,通过竖梁1上的直线模组实现横梁8升降;横梁8与竖梁1之间还设置有角度调节结构;若干个锭子支架3设置在横梁8上,通过横梁8上的直线模组实现锭子支架3左右移动。所述平台9上设置有配重6。平台9下部设置有万向轮4。所述竖梁1通过支架7固定在平台9上。
28.所述角度调节结构设置为锥齿轮组10,并通过电机三11带动锥齿轮旋转。所述竖梁1的直线模组设置有电机一5带动,横梁8的直线模组设置有电机二2带动。
29.所述锭子支架3包括底座、磁吸十字推爪15、支柱16和定位器17,所述底座的两侧设置有卡盘,卡盘卡在横梁8上,横梁8内部设置有直线模组,带动底座左右移动,支柱16固定在底座上,磁吸十字推爪15套在支柱16底部,定位器17安装在支柱16的端部。
30.设备主体结构如图1所示,竖梁1上安装直线模组,在电机一5的驱动下横梁8沿着竖梁1上下移动。横梁8上安装直线模组,在电机二2的驱动下锭子支架3沿着横梁8左右移动。支架7构成三角形结构,保证设备的稳定性和足够的支撑力。配重6保证设备重心后移,在装配多个锭子时保持稳定。万向轮4安装在平台9的下方,保证设备在锭子装配过程中移动的需要并提供足够的灵活性。
31.角度调节结构如图2所示,电机三11驱动两个相对的锥齿轮相互配合,并限制锥齿轮的主动轮自由转动,实现控制横梁8的旋转角度。横梁8与竖梁1通过卡盘一12和底座一13连接,其中卡盘一12与底座是可拆卸设计。
32.锭子支架3装置如图3所示,锭子支架3与横梁8之间依靠卡盘二18和底座二14连接,通过四个角落的螺栓实现固定,并保持可拆卸设计。锭子在装配过程中存放在支柱16上,定位器17安装在支柱16顶端,实现支柱16与锭子架准确定位。磁吸十字推爪15在定位完成后,推动锭子沿着支柱16向外移动,实现锭子装配到锭子架。
33.卡盘一12和底座一13可拆卸结构如图4所示,卡盘一12固定在竖梁1的的卡槽中,底座一13通过四个角落的螺栓固定在卡盘一12上。并且锥齿轮组10与底座一13之间通过滚动轴承连接,方便横梁8的拆卸和更换。
34.磁吸十字推爪15结构如图5所示,推手在四方向各设置一个,保证在卸载过程中锭子受力稳定。推手前端位置安装有电磁吸附装置19,在锭子装载过程中保持吸附状态,保证锭子支架3装置在定位过程中可靠的固定在支柱16上。磁吸十字推爪15推爪设置为向外突出的形状,保证锭子在卸载过程中能移动到锭子架上。
35.工作流程介绍:
36.1)锭子在锭子房中按照要求停放后,由电机一5控制横梁8上下移动,调整至合适的高度,整个设备在万向轮4的控制下向前移动,由锭子支架3上的支柱16插入锭子中心孔,通过磁吸十字推爪15前端的吸附装置19将锭子固定在支柱16上。并通过电机一5控制支撑横梁8抬高高度,完成锭子的装载过程。
37.2)设备装载锭子后,由万向轮4控制设备移动位置至相应的锭子架前。电机一5控制横梁8上下移动,由最中心的锭子支架3依靠定位器17与钉子架之间实现高度定位。电机三11控制锥齿轮组10转动,相应的控制横梁8周向转动实现角度定位。电机二2控制横梁8上的锭子支架3装置左右移动实现长度定位。
38.3)定位完成后,电机控制锭子支架3中的磁吸十字推爪15向前推动锭子,直到锭子移动到锭子架上,断开磁吸十字推爪15前端的吸附装置19与锭子分离,完成锭子的卸载过程。
39.以上所述,仅是本实用新型的最佳实施例而已,并非对本实用新型的任何形式的限制,任何熟悉本领域的技术人员,在不脱离本实用新型技术方案范围的情况下利用上述揭示的方法和内容对本实用新型做出的许多可能的变动和修饰,均属于权利要求书保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。