1.本发明涉及板材自动加工技术领域,特别是涉及一种板材的螺母加工系统。
背景技术:
2.随着人们生活水平的提高,越来越多的人们在装修时倾向于选择木质家具,例如衣柜、床、茶几等,制作材料来源于自然,具有环保、健康等优点,能够帮助人们打造出充满田园气息的生活环境。木质家具的组装主要靠木质板材通过螺栓连接、钉钉的方式连接、粘接、卡勾连接等方式进行拼接,在采用螺栓连接的家具制作过程中,需要在木质板材上加工螺母。
3.传统技术中,上述木板等板材的加工方式完全是通过人工完成的,特别是对板材上加工金属内外牙螺母时,需要人工手持螺母枪对木质板材进行连续的多次打螺母,这种方式不仅生产效率低下,加工质量参差不齐,也使得木质板材加工的人工成本居高不下,不利于大规模的自动化生产。
技术实现要素:
4.基于此,有必要克服现有技术的缺陷,提供一种板材的螺母加工系统,能够有效提高板材上螺母加工的效率和质量,降低人工成本。
5.其技术方案如下:一种板材的螺母加工系统,包括:上料机构,所述上料机构包括第一识别件与第一传输件,所述第一传输件用于传输板材,所述第一识别件用于识别板材的位置信息;上料机器人,所述上料机器人与所述第一识别件控制连接,所述上料机器人用于拾取和释放板材;螺母安装机构,所述螺母安装机构包括第二传输件及安装组件,所述第二传输件与所述上料机器人间隔设置,所述安装组件与所述第二传输件相邻设置,所述安装组件用于给板材加工螺母;下料机构,所述下料机构包括第三传输件与下料件,所述第三传输件与所述第二传输件相邻设置,所述下料件用于将所述第二传输件上的板材下料至所述第三传输件上。
6.上述板材的螺母加工系统,在工作过程中,首先,板材通过第一传输件传输至上料位置,第一识别件识别第一传输件上的板材的位置到达上料位置后,上料机器人工作,将第一传输件上的板材拾取并转运至第二传输件上;然后,第二传输件继续将板材传输至安装位置,安装组件自动对板材加工螺母;螺母加工完成后,第二传输件将板材传输至下料位置,下料件启动,将下料位置上的板材拾取,并转运至第三传输件上;最后,第三传输件将加工好的板材运输至下一工位。本螺母加工系统,通过第一传输件、第二传输件及第三传输件分别的传输作用,有利于提高板材在各个工位之间的自动运输效率,同时通过第一识别件的自动识别作用和上料机器人、下料件的自动上下料作用,有利于减少人工参与,提高工作效率和可靠性,降低人工成本,同时安装组件的自动加工方式有利于保证板材上螺母的加工质量,进而提高总体产能。
7.在其中一个实施例中,所述上料机构为至少两个,两个所述上料机构分别设置于
所述第二传输件的相对两侧,所述上料机器人设置于两个所述上料机构之间。
8.在其中一个实施例中,所述第二传输件为至少两个,两个所述第二传输件相邻设置,且两个所述第二传输件均设置于两个所述第一传输件之间。
9.在其中一个实施例中,所述安装组件为两个以上,两个以上所述安装组件沿所述第二传输件的传输方向分别设置于一个或两个以上所述第二传输件的相对两侧。
10.在其中一个实施例中,所述安装组件包括机械臂及自动打螺母枪,所述机械臂与所述第二传输件相邻设置,所述自动打螺母枪与所述机械臂的驱动端连接,所述自动打螺母枪用于对板材加工螺母。
11.在其中一个实施例中,所述螺母安装机构还包括第二识别件,所述第二识别件设置于所述第二传输件上,所述第二识别件用于识别所述板材的类型信息,且所述第二识别件与所述安装组件控制连接。
12.在其中一个实施例中,所述螺母加工系统还包括打标机构,所述打标机构设置于所述第二传输件靠近所述下料件的一侧,所述打标机构与所述第二识别件控制连接,所述打标机构用于对板材进行打标操作。
13.在其中一个实施例中,所述上料机构还包括第一升降机,所述第一升降机设置于所述第一传输件的传输路线上,所述第一升降机用于驱使板材沿所述第一传输件的高度方向运动。
14.在其中一个实施例中,所述下料机构还包括第二升降机,所述第二升降机设置于所述第三传输件的传输路线上,所述第二升降机用于驱使板材沿所述第三传输件的高度方向运动。
15.在其中一个实施例中,所述下料件包括龙门机及下料吸盘,所述下料吸盘与所述龙门机活动连接,所述龙门机与所述第二传输件及所述第三传输件呈夹角设置,所述龙门机用于驱使所述下料吸盘沿所述第二传输件的宽度方向和高度方向运动,所述下料吸盘用于拾取和放置板材。
16.在其中一个实施例中,所述螺母加工系统还包括第四传输件,所述第四传输件与所述第一传输件相邻设置,所述第四传输件用于传输板材的托盘。
附图说明
17.构成本技术的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
18.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
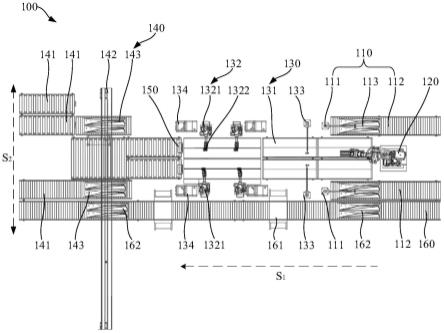
19.图1为一实施例中所述的板材的螺母加工系统的整体结构示意图;
20.图2为一实施例中所述的螺母安装机构的结构示意图。
21.附图标记说明:
22.100、板材的螺母加工系统;110、上料机构;111、第一识别件;112、第一传输件;113、第一升降机;120、上料机器人;130、螺母安装机构;131、第二传输件;132、安装组件;
1321、机械臂;1322、自动打螺母枪;1323、第三识别件;133、第二识别件;134、螺母传输设备;140、下料机构;141、第三传输件;142、下料件;143、第二升降机;150、打标机构;160、第四传输件;161、天桥;162、第三升降机。
具体实施方式
23.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施例的限制。
24.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
25.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
26.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
27.在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
28.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
29.请参阅图1与图2,图1示出了本发明一实施例中所述的板材的螺母加工系统100的整体结构示意图;图2示出了本发明一实施例中所述的螺母安装机构130的结构示意图。本发明一实施例提供了一种板材的螺母加工系统100,包括:上料机构110、上料机器人120、螺母安装机构130及下料机构140。上料机构110包括第一识别件111与第一传输件112,第一传输件112用于传输板材,第一识别件111用于识别板材的位置信息。上料机器人120与第一识别件111控制连接,上料机器人120用于拾取和释放板材。螺母安装机构130包括第二传输件
131及安装组件132,第二传输件131与上料机器人120间隔设置,安装组件132与第二传输件131相邻设置,安装组件132用于给板材加工螺母。下料机构140包括第三传输件141与下料件142,第三传输件141与第二传输件131相邻设置,下料件142用于将第二传输件131上的板材下料至第三传输件141上。
30.上述板材的螺母加工系统100,在工作过程中,首先,板材通过第一传输件112传输至上料位置,第一识别件111识别第一传输件112上的板材的位置到达上料位置后,上料机器人120工作,将第一传输件112上的板材拾取并转运至第二传输件131上;然后,第二传输件131继续将板材传输至安装位置,安装组件132自动对板材加工螺母;螺母加工完成后,第二传输件131将板材传输至下料位置,下料件142启动,将下料位置上的板材拾取,并转运至第三传输件141上;最后,第三传输件141将加工好的板材运输至下一工位。本螺母加工系统,通过第一传输件112、第二传输件131及第三传输件141分别的传输作用,有利于提高板材在各个工位之间的自动运输效率,同时通过第一识别件111的自动识别作用和上料机器人120、下料件142的自动上下料作用,有利于减少人工参与,提高工作效率和可靠性,降低人工成本,同时安装组件132的自动加工方式有利于保证板材上螺母的加工质量,进而提高总体产能。
31.其中,上料机器人120与第一识别件111控制连接应理解为,上料机器人120与第一识别件111能够产生通信和数据交互,第一识别件111获取位置信息后,能够将位置信息传递给上料机器人120,其连接方式可为直接连接或通过中间控制装置间接连接,上料机器人120获取到第一识别件111的位置信息后,能够实现对板材的自动上料操作。
32.需要说明的是,本板材的螺母加工系统100中,板材除了木质板材外,还可为金属板材、复合板材、塑料板材等,且螺母的种类为内外牙螺母,其内牙和外牙的形状也可为不同形状。
33.可选地,第一识别件111可为2d相机、3d相机、读码枪、rfid识别器、扫描设备或其它识别设备。
34.具体地,请参阅图1,第一识别件111为相机。具体地,第一识别件111为3d相机。第一识别件111设置于第一传输件112上或与第一传输件112相邻设置,第一识别件111用于对板材的位置进行识别。如此,能够提高板材的识别效率,从而保证上料机器人120抓取板材的可靠性与稳定性,满足生产需要,提高板材上螺母的加工效率。本实施例仅提供一种第一识别件111的具体实施方式,但并不以此为限。
35.可选地,上料机器人120与第一识别件111控制连接的连接方式可为有线连接、无线连接或其它连接方式。具体在本实施例中,上料机器人120与第一识别件111通过线缆控制连接。
36.具体地,请参阅图1,上料机器人120包括上料机械臂1321及上料夹具,上料夹具与上料机械臂1321的驱动端驱动连接,上料夹具用于拾取和释放板材。如此,上料机械臂1321有利于提供多个自由度,进而扩大上料机器人120的工作范围,提高工作可靠性。上料夹具对板材的拾取方式可为夹取、勾取、吸取、粘取或其它上料方式。在本实施例中,上料夹具对板材的拾取方式为吸取。
37.在一个实施例中,请参阅图1,上料机构110为至少两个。两个上料机构110分别设置于第二传输件131的相对两侧,上料机器人120设置于两个上料机构110之间。具体地,上
料机构110为两个。如此,通过设置生产间隔,能够实现一个上料机器人120对两个上料机构110上的板材同时进行上料,有利于提高上料机器人120的利用率,从而提高板材螺母加工系统的整体工作效率。
38.在一个实施例中,请参阅图1,第二传输件131为至少两个,两个第二传输件131相邻设置,且两个第二传输件131均设置于两个第一传输件112之间。具体地,第二传输件131为四个。如此,四个第二传输件131能够同时工作,为安装组件132传输板材,进而提高板材的传输效率。并且,两个第一传输件112与两个第二传输件131分别一一对应设置,上料机器人120将板材从一个第一传输件112转运至一个第二传输件131中,有利于进一步提高上料机器人120的利用率,进而有利于提高整体生产效率。
39.在一个实施例中,请参阅图1,安装组件132为两个以上,两个以上安装组件132沿第二传输件131的传输方向分别设置于一个或两个以上第二传输件131的相对两侧。具体地,安装组件132为四个,每条第二传输件131对应两个安装组件132。如此,两个安装组件132能够同时对两条第二传输件131上的板材不同位置处进行螺母加工操作,有利于提高加工效率。当然,安装组件132还可三个、五个、六个、或其它数量,在此不作具体限定。
40.其中,为了进一步理解与说明第二传输件131的传输方向,以图1为例,第二传输件131的传输方向为图1中直线s1上箭头所指的方向。
41.在一个实施例中,请参阅图1与图2,安装组件132包括机械臂1321及自动打螺母枪1322,机械臂1321与第二传输件131相邻设置,自动打螺母枪1322与机械臂1321的驱动端连接,自动打螺母枪1322用于对板材加工螺母。如此,机械臂1321带动打螺母枪运动至板材的螺母加工位置,自动打螺母枪1322启动,将自动打螺母枪1322内的螺母安装至板材上,如此,有利于提高螺母的加工质量,同时提高螺母的加工效率,降低人工成本。
42.进一步地,请参阅图2,自动打螺母枪1322为两个以上,两个以上自动打螺母枪1322分别与机械臂1321的驱动端连接。如此,一个机械臂1321能够带动两个以上自动打螺母枪1322运动,两个以上自动打螺母枪1322同时工作,能够同时对板材同一位置处相邻位置加工螺母,有利于提高加工效率,并且有利于减少机械臂1321的行程,减少重复定位的频率,进而提高定位精度和螺母加工品质。
43.在一个实施例中,请参阅图1,螺母安装机构130还包括螺母传输设备134,螺母传输设备134与自动打螺母枪1322连通,螺母传输设备134用于给自动打螺母枪1322输送螺母。如此,能够实现自动打螺母枪1322的螺母自动上料,进而提高螺母安装机构130的自动化程度和螺母加工效率。
44.在一个实施例中,安装组件132还包括第三识别件1323,第三识别件1323与自动打螺母枪1322连接,第三识别件1323用于识别板材上螺母的预设安装位置。如此,第三识别件1323能够进一步识别螺母安装位置,从而进行定位,提高定位精度,进而保证螺母的安装品质。
45.可选地,第三识别件可为2d相机、3d相机、激光扫描仪、超声波传感器、位移传感器或其它识别装置。
46.具体地,第三识别件为2d相机。如此,在保证定位需求的基础上有利于降低成本,提高经济效益。本实施例仅提供一种第三识别件的具体实施方式,但并不以此为限。
47.在一个实施例中,请参阅图1,螺母安装机构130还包括第二识别件133,第二识别
件133设置于第二传输件131上,第二识别件133用于识别板材的类型信息,且第二识别件133与安装组件132控制连接。如此,第二识别件133用于板材的定位工序,能够对第二传输件131上的板材识别类型,对应不同的螺母预设加工位置,然后将这些位置信息上传到系统,系统根据打螺母孔的位置与所有产品型号的cad图进行比对,找到对应型号的cad图,将其传达给机械臂1321和安装组件132,机械臂1321驱使安装组件132对相应位置进行螺母加工,因此有利于提高螺母加工效率。
48.第二识别件133可为线扫相机、2d相机、3d相机、读码枪、rfid识别器、扫描设备或其它识别设备。
49.具体地,请参阅图1,第二识别件133为相机。具体地,第二识别件133为线扫相机。第二识别件133设置于第二传输件131上或与第二传输件131相邻设置,第二识别件133用于对板材的类型进行识别。如此,扫描效率高,能够提高第二识别件133对板材类型的识别效率,从而保证安装组件132的加工正确性和稳定性,满足生产需要,提高板材上螺母的加工效率。本实施例仅提供一种第二识别件133的具体实施方式,但并不以此为限。
50.在一个实施例中,请参阅图1,螺母加工系统还包括打标机构150。打标机构150设置于第二传输件131靠近下料件142的一侧,打标机构150与第二识别件133控制连接,打标机构150用于对板材进行打标操作。具体地,打标机构150为激光打标机。如此,板材上加工好螺母后,第二传输件131继续对板材进行传输,板材被运送到打标工序,由激光打标机对板材进行标号,方便板材的管理和储存。
51.进一步地,打标机构150设有防护罩和抽吸件(图中未示出)。防护罩的开口朝向第二传输件131设置,抽吸件与防护罩连通,抽吸件另一端与负压气源连通。如此,激光打标过程中会产生木屑,防护罩能够避免木屑飞溅污染工作环境,同时抽吸件能够将木屑抽吸走,进而完成打标操作,提高打标工序的工作品质。
52.在上料过程中,板材可以为平铺放置在第一传输件112上进行运输,也可为多个相同或不同型号的板材堆叠放置在第一传输件112上进行运输。
53.在一个实施例中,请参阅图1,上料机构110还包括第一升降机113,第一升降机113设置于第一传输件112的传输路线上,第一升降机113用于驱使板材沿第一传输件112的高度方向运动。具体地,第一升降机113为动力滚筒液压升降台。如此,板材堆叠传输时,在上料工位上,上料机器人120每次拾取最上面一层的板材,每拾取完一片板材后,第一升降机113驱使堆叠的板材上升,使得下一片板材上升至上一片板材的位置,保证上料机器人120拾取每一片板材时都为同一高度,有利于简化上料机器人120的定位程序,提高系统对不同板材的兼容性。
54.在一个实施例中,请参阅图1,下料机构140还包括第二升降机143,第二升降机143设置于第三传输件141的传输路线上,第二升降机143用于驱使板材沿第三传输件141的高度方向运动。具体地,第二升降机143为动力滚筒液压升降台。如此,下料件142下料过程中,需要对加工好的板材进行堆叠时,下料件142陆续将板材下料至第二升降机143上,每堆叠一片板材,第二升降机143下降,保证第二升降机143每次下料时都位于同一高度,直至堆叠完成,再通过第三传输件141传输至下一工位。
55.在一个实施例中,请参阅图1,下料件142包括龙门机及下料吸盘。下料吸盘与龙门机活动连接,龙门机与第二传输件131及第三传输件141呈夹角设置,例如,在本实施例中,
龙门机与第二传输件131及第三传输件141为垂直设置。龙门机用于驱使下料吸盘沿第二传输件131的宽度方向和高度方向运动,下料吸盘用于拾取和放置板材。如此,下料件142进行二轴运动,龙门机带动下料吸盘运动,下料吸盘吸取打标完成的板材后,龙门机带动板材运输至第三传输件141上的下料位置,下料吸盘将板材下料至第三传输件141上,从而运输至下料位置。有利于节省成本,提高经济效益。当然,下料件142还可为机械臂1321等多自由度机器人完成下料操作。
56.为了进一步理解与说明第二传输件131的宽度方向,以图1为例,第二传输件131的传输方向为图1中直线s2上任意一箭头所指的方向。
57.在一个实施例中,请参阅图1,螺母加工系统还包括第四传输件160,第四传输件160与第一传输件112相邻设置,第四传输件160用于传输板材的托盘。如此,板材堆叠时,托盘位于堆叠的板材的底部,随板材一起在第一传输件112上传输,上料完成后,上料机器人120将托盘拾转移至第四传输件160上,第四传输件160将托盘传输至下料位置,然后下料件142将托盘转运至第三传输件141上,供加工好的板材堆叠下料。
58.其中,第一传输件112、第二传输件131、第三传输件141、第四传输件160分别可为传送带、动力平移地辊机、传送链、皮带机或其它传输机构。具体在本实施例中,第一传输件112、第三传输件141、第四传输件160为动力平移地辊机,第二传输件131为皮带机。
59.进一步地,请参阅图1,第四传输件160上还设有天桥161,天桥161横跨所述第四传输件160设置。更进一步地,天桥161为两个以上。如此,天桥161能够供工作人员通过,从而能够进入到系统中间位置,满足调试、操作和维护其它机构的要求。
60.在一个实施例中,请参阅图1,第四传输件160设有第三升降机162,第三升降机162设置于第四传输件160的传输路径上。第三升降机163用于驱使托盘沿第四传输件160的高度方向运动。如此,方便上料机器人120对托盘的定位和运输,提高定位精度和转运效率。
61.进一步地,请参阅图1,第三升降机162为至少两个,两个第三升降机162分别靠近第一传输件112设置和靠近第三传输件141设置。如此,上料和下料时都能够驱使托盘升降,进一步方便上料机器人120和下料件142对托盘的定位和运输,提高工作效率。
62.在一个实施例中,板材的螺母加工系统100还包括rgv运输车(图中未示出),初始位置时,rgv运输车与第三传输件141对应设置。如此,rgv运输车能够自动装载加工好的板材和堆叠好的板材,从而自动运输至预设位置进行储藏等操作,有利于提高板材螺母加工系统的自动化程度。
63.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
64.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。