技术特征:
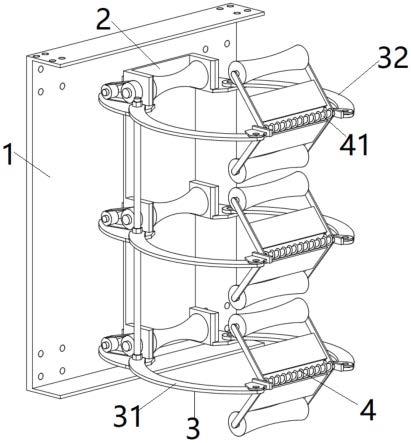
1.一种砍树机器人用攀爬机构,其特征在于,包括:支撑组件、动力组件、连接组件与夹轮组件;所述动力组件包括:动力轮与驱动电机;所述动力轮可竖直转动设置于所述支撑组件上;所述驱动电机设置于所述支撑组件上,且与所述动力轮传动连接;所述连接组件包括:第一曲杆与第二曲杆;所述第一曲杆的第一端固定连接所述支撑组件;所述第二曲杆的第一端固定连接所述支撑组件;所述第一曲杆与第二曲杆分别设置于所述动力轮两侧,且二者相向设置围成夹持腔;所述夹轮组件包括:连接轴、扭簧、上夹杆、下夹杆、上夹轮与下夹轮;所述连接轴水平设置,且两端分别连接所述第一曲杆的第二端和所述第二曲杆的第二端;所述上夹杆与下夹杆均可竖直转动设置于所述连接轴上,且二者之间形成夹角;所述扭簧套接于所述连接轴上,且两端分别连接所述上夹杆与下夹杆;所述上夹轮可竖直转动设置于所述上夹杆上;所述下夹轮可竖直转动设置于所述下夹杆上;所述上夹轮与下夹轮沿竖直面的投影均位于所述夹持腔内。2.根据权利要求1所述的砍树机器人用攀爬机构,其特征在于,所述动力组件、连接组件与夹轮组件均包括多组;多组所述动力组件沿竖直方向间隔分布于所述支撑组件上;多组所述连接组件与多组所述动力组件一一对应设置;多组所述夹轮组件与多组所述连接组件一一对应设置。3.根据权利要求2所述的砍树机器人用攀爬机构,其特征在于,所述动力组件、连接组件与夹轮组件均包括三组。4.根据权利要求1所述的砍树机器人用攀爬机构,其特征在于,所述动力组件包括:传动轮与传送带;所述传动轮可转动设置于所述支撑组件上,且通过传送带与所述动力轮同步传动连接;所述驱动电机的输出轴与所述传动轮固定连接。5.根据权利要求1所述的砍树机器人用攀爬机构,其特征在于,所述动力轮、上夹轮与下夹轮的水平投影均为内凹弧型。6.根据权利要求2所述的砍树机器人用攀爬机构,其特征在于,所述支撑组件包括:竖板与横架;所述竖板竖直设置;所述横架设置于所述竖板上;所述第一曲杆的第一端与第二曲杆的第一端均固定于所述横架上;所述动力轮与驱动电机均设置于所述横架上。7.根据权利要求6所述的砍树机器人用攀爬机构,其特征在于,所述横架上设置有u型连接板;
所述动力轮可转动设置于所述u型连接板内。8.根据权利要求6所述的砍树机器人用攀爬机构,其特征在于,所述支撑组件还包括:串接杆;所述横架设置有多个;多个所述横架与多组所述连接组件一一对应设置;所述串接杆竖直设置,且与各所述横架均固定连接。9.根据权利要求6所述的砍树机器人用攀爬机构,其特征在于,所述竖板上设置有多个安装孔。10.根据权利要求1所述的砍树机器人用攀爬机构,其特征在于,所述动力轮、上夹轮与下夹轮上均设置有防滑纹。
技术总结
本申请公开了一种砍树机器人用攀爬机构,包括:支撑组件、动力组件、连接组件与夹轮组件;动力组件包括:动力轮与驱动电机;动力轮转动设置于支撑组件上;驱动电机与动力轮传动连接;连接组件包括:第一曲杆与第二曲杆;第一曲杆与第二曲杆分别设置于动力轮两侧;夹轮组件包括:连接轴、扭簧、上夹杆、下夹杆、上夹轮与下夹轮;连接轴两端分别连接第一曲杆和第二曲杆;上夹杆与下夹杆均转动设置于连接轴上,二者之间形成夹角;扭簧套接于连接轴上,且两端分别连接上夹杆与下夹杆;上夹轮转动设置于上夹杆上;下夹轮转动设置于下夹杆上。通过夹轮组件、连接组件与动力轮组成对树干的夹持结构,可以适配不同尺寸的树干且无需复杂的结构。构。构。
技术研发人员:吴毅江 崔益国 陈浩河 董芝春
受保护的技术使用者:广东电网有限责任公司中山供电局
技术研发日:2022.06.22
技术公布日:2022/8/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。