1.本实用新型涉及医疗器械技术领域,特别涉及一种喉罩通气监测系统。
背景技术:
2.气道管理是临床麻醉和急救复苏中的关键环节,在众多气道管理工具中,喉罩是现代临床麻醉和院前急救-院内急诊-重症监护与治疗中应用广泛的通气工具之一。喉罩是由一个可充气的树叶形的硅树脂罩和橡胶连接管组成的气道用具,它可经口盲插或明视经口插入咽喉部,给喉罩气囊部位充气时,膨胀的喉罩可以包绕并密封会厌和声门,围绕喉头而形成一个低压的密封罩,喉罩连接管通向口腔外可以与呼吸机相连,可自主呼吸或正压通气。
3.喉罩适用于禁食的患者短时常规麻醉过程中达到及维持对气道的控制,也适用于出现已知或未知困难的气道管理,还可以用于具有气道堵塞风险、可能需要人工通气的深度昏迷患者的复苏抢救过程中建立清洁的气道。手术过程中,气道导管先装入喉罩中再一并置入人体气道,在喉罩到达预定位置时,再继续送入气道导管至规定位置,此时需要将气道导管固定住,以避免气道导管发生位移。
4.目前,可视化插管技术已广泛应用,包括在可视喉镜直视下置入气管导管或喉罩,保障了机械通气的成功实施。
5.术中机械通气往往需要持续数小时,尽管喉罩的置入过程是在直视下完成,但对于非稳定通气技术,喉罩在接下来的机械通气过程中存在极大的监管隐患。患者术中体位的变动、喉部轻微的吞咽活动都可能导致喉罩位置发生变化,引起气道压和胃内压增加、通气不足甚至窒息,这些问题通过常规的呼吸机参数往往难以及时发现,为患者术中通气带来风险。
技术实现要素:
6.现有的喉罩在连续通气的过程中,由于患者术中体位、喉部轻微的吞咽活动可能导致喉罩位置发生变化,引起气道压和胃内压增加、通气不足甚至窒息,存在极大的安全隐患。
7.针对上述问题,提出一种喉罩通气监测系统,通过获取感兴趣物体(例如气泡)关键点位置(例如声门位置、小角结节处或者楔形结节处等)及其光流信息,对关键点位置的喉罩通气异常情况进行定性和定量分析,根据上述光流信息计算分析喉罩通气定量参数(呼吸频率),将呼吸频率参数与呼吸机的通气参数进行对比,获取喉罩当前通气情况,及时发现喉罩的位移或者患者呼吸不规则的情况,发现可能存在的误吸及返流情况,提醒监测人及时进行检查,保障喉罩通气的安全。
8.一种喉罩通气监测系统,包括:通气设备、图像采集设备以及数据处理设备;
9.所述通气设备包括第一通气管及第二通气管,所述第一通气管的一端连接有喉罩套囊;所述第二通气管嵌套设置在所述第一通气管的内部,所述第二通气管的一端连接有
气管导管接头,在所述第二通气管靠近所述气管导管接头的位置设置有导管套囊;所述第二通气管能够沿所述第一通气管的内壁自由伸缩,所述气管导管接头能够从所述喉罩套囊的开口处伸出,
10.所述图像采集设备用于获取喉罩通气连续监测视频;
11.所述图像处理设备包括特征提取模块、分析判断模块;所述特征提取模块用于从所述监测视频中的单帧图像或者多帧图像提取表观特征或者像素光流特征,并传输到所述分析判断模块;所述分析判断模块用于根据所述表观特征及像素光流特征,分别预测关键点位置及预测运动信息,并根据所述关键点位置及预测运动信息获取感兴趣光流信息;
12.其中,所述关键点位置包括声门位置和楔状结节、小角结节位置,所述感兴趣光流信息为感兴趣物体一定时间内形成的光流信息,所述感兴趣物体包括因漏气或者返流形成的大小气泡。
13.优选地,所述特征提取模块包括
14.第一特征提取单元;
15.第二特征提取单元;
16.所述第一特征提取单元用于提取所述监测视频中单帧图像的第一表观特征或者第二表观特征,并将所述第一表观特征或者第二表观特征发送到所述分析判断模块进行预测分析;
17.所述第二特征提取单元用于提取所述监测视频中多帧图像的像素光流特征,并将所述像素光流特征传输到所述分析判断模块进行预测分析。
18.优选地,所述第二特征提取单元包括:光流传感器电路;光流控制电路;
19.所述光流传感器电路与所述光流控制电路电连接;
20.所述光流传感器电路用于对采集到的视频图像帧进行灰度、裁剪,生成预处理图像,并将所述预处理图像传输到光流控制电路进行像素光流算法计算。
21.优选地,所述光流传感器电路为vga型cmos传感器电路,所述光流控制电路包括光流控制芯片u1;
22.所述光流传感器u2包括24引脚,所述光流控制芯片包括100引脚;
23.其中,所述光流传感器u2的第19引脚、第21引脚、第22引脚、第20引脚、第18引脚、第16引脚、第14引脚、第12引脚依次为像素数据引脚dcmi_d0~ dcmi_d7,分别与所述光流控制芯片u1的第63引脚、第64引脚、第97引脚、第98引脚、第3引脚、第92引脚、第4引脚、第5引脚连接;所述光流传感器u2的第9引脚、第7引脚、第17引脚依次为行同步信号引脚、帧同步信号引脚、像素时钟引脚,分别与所述控制芯片u1的第29引脚、第93引脚、第 31引脚连接。
24.优选地,所述第一表观特征为:利用卷积神经网络模型或者残差网络模型算法获取;所述第二表观特征为:利用fpn算法从所述第一表观特征中提取的分辨率及尺寸最大的多尺度表观特征。
25.优选地,所述像素光流特征为:利用循环神经网络模型算法或者lstm算法从所述监测视频中的多帧图像提取。
26.优选地,所述数据处理设备还包括检测模块;所述检测模块用于对喉罩通气关键点位置进行漏气、返流进行异常检测,对喉罩声门左右及前后位移进行异常检测。
27.优选地,所述数据处理设备还包括定量分析模块;所述定量分析模块用于根据一定运行时间内的感兴趣光流信息对患者的呼吸频率进行分析计算,获取患者呼吸频率。
28.优选地,所述数据处理设备还包括对比模块;所述对比模块用于将监测到的呼吸频率参数与呼吸机参数进行比较分析,以确定喉罩通气是否异常。
29.实施本实用新型所述的一种喉罩通气监测系统,通过获取感兴趣物体(例如气泡)关键点位置(例如声门位置、小角结节处或者楔形结节处等)及其光流信息,对关键点位置的喉罩通气异常情况进行定性和定量分析,根据上述光流信息计算分析喉罩通气定量参数(呼吸频率),将呼吸频率参数与呼吸机的通气参数进行对比,获取喉罩当前通气情况,及时发现喉罩的位移或者患者呼吸不规则的情况,发现可能存在的误吸及返流情况,提醒监测人及时进行检查,保障喉罩通气的安全。
附图说明
30.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
31.图1是本实用新型中的通气设备的第一结构示意图;
32.图2是本实用新型中的通气设备的第二结构示意图;
33.图3是本实用新型中一种喉罩通气监测系统实施例示意图;
34.图4是人体咽喉位置构造图;
35.图5是本实用新型中光流控制电路电子元件连接示意图;
36.图6是本实用新型中光流传感器电路电子元件连接示意图;
37.附图中各数字所指代的部位名称为:100——分析判断模块、200——图像采集模块、300——特征提取模块、310——光流传感器电路、320——光流控制电路、400——检测模块、500——定量分析模块、600——对比模块、710——声门、711——声带、720——楔形结节、730——小角结节。
具体实施方式
38.下面将结合实用新型中的附图,对本实用新型中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的其他实施例,都属于本实用新型保护的范围。
39.现有的喉罩在连续通气的过程中,由于患者术中体位、喉部轻微的吞咽活动可能导致喉罩位置发生变化,引起气道压和胃内压增加、通气不足甚至窒息,存在极大的安全隐患。
40.针对上述问题,提出一种喉罩通气监测系统。现有的喉罩在连续通气的过程中,由于患者术中体位、喉部轻微的吞咽活动可能导致喉罩位置发生变化,引起气道压和胃内压增加、通气不足甚至窒息,存在极大的安全隐患。
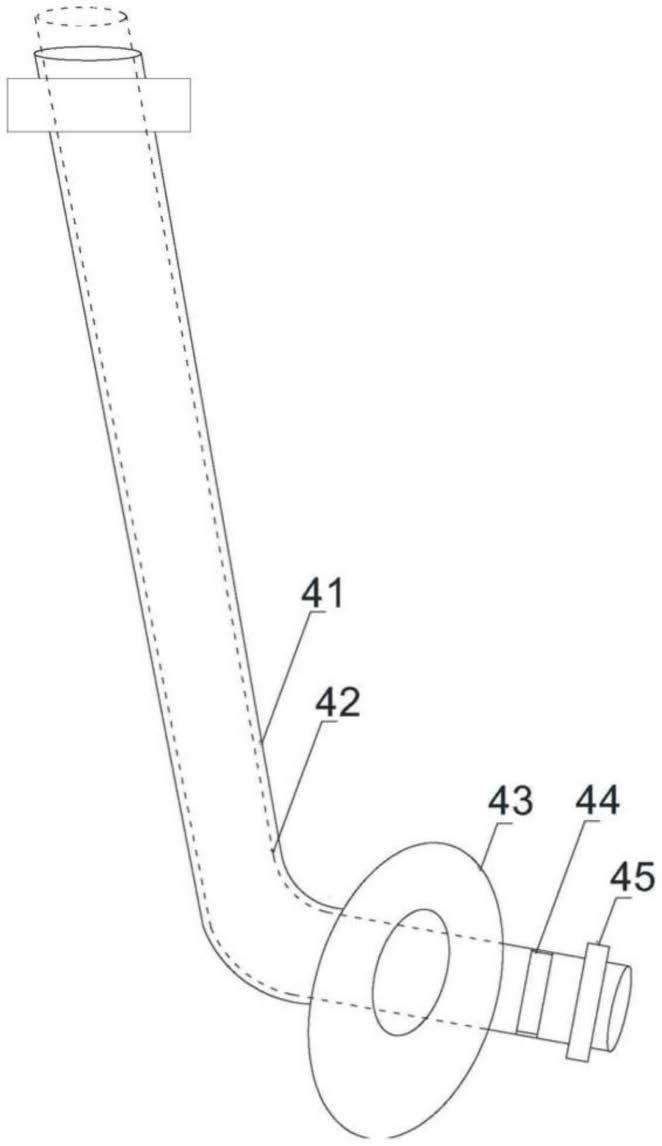
41.如图1及图2所示,图1为本实用新型所述通气设备4的第一结构示意图,图2为本发
明所述通气设备4的第二结构示意图,所述通气设备与所述控制模块相连接,所述通气设备4具体包括第一通气管41及第二通气管42,所述第一通气管41的一端连接有喉罩套囊43;所述第二通气管42嵌套设置在所述第一通气管41的内部,所述第二通气管42的一端连接有气管导管接头45,在所述第二通气管42靠近所述气管导管接头45的位置设置有导管套囊44;所述第二通气管42能够沿所述第一通气管41的内壁自由伸缩,所述气管导管接头45能够从所述喉罩套囊43的开口处伸出。图1即为所述气管导管接头45从所述喉罩套囊43的开口处伸出的状态,此时所述通气设备4通过所述第二通气管42 伸出至气管内实施通气;图2为所述第二通气管42收缩至所述第一通气管41 内部的状态,此时,所述气管导管接头45也收缩至所述第一通气管41的内部与所述第一通气管41结合成一体,因此,此时所述通气设备4的所述第一通气管41通过所述喉罩套囊43实施在声门上部通气。在发明优选的实施例中,在所述第一通气管41及所述第二通气管42的最上端接口处,有一旋钮连接所述第一通气管41及所述第二通气管42,实现两者的固定和密封。
42.图3是本实用新型中一种喉罩通气监测系统实施例示意图,用于对喉罩通气进行监测,向监测人发出监测信息,包括图像采集模块200、特征提取模块 300及分析判断模块100;图像采集模块200用于获取喉罩通气连续监测视频;特征提取模块300用于从监测视频中的单帧图像或者多帧图像提取表观特征或者像素光流特征,并传输到分析判断模块100;分析判断模块100用于根据表观特征及像素光流特征,分别预测关键点位置及预测运动信息,并根据关键点位置及预测运动信息获取感兴趣光流信息;关键点位置包括声门710位置和楔状结节、小角结节730位置,感兴趣光流信息为感兴趣物体一定时间内形成的光流信息,感兴趣物体包括因漏气或者返流形成的大小气泡。
43.根据一段时间的光流信息,对病人的呼吸频率进行定量分析,供监测人参考。感兴趣物体可以为在喉罩通气过程中因返流或者返流产生的大小气泡,可能产生感兴趣物体的关键点位置可以为喉罩生门区域的声门710位置、小角结节730或者楔形结节720等。
44.如图4是人体咽喉位置构造图,通过获取感兴趣物体(例如气泡)关键点位置(例如声门710位置、声门710两侧较亮部位为声带711,小角结节730处或者楔形结节720处等)及其光流信息,对关键点位置的喉罩通气异常情况进行定性和定量分析,根据上述光流信息计算分析喉罩通气定量参数(呼吸频率),将呼吸频率参数与呼吸机的通气参数进行对比,获取喉罩当前通气情况,及时发现喉罩的位移或者患者呼吸不规则的情况,发现可能存在的误吸及返流情况,提醒监测人及时进行检查,保障喉罩通气的安全。
45.在一个优选实施方式中,特征提取模块300进一步包括第一特征提取单元及第二特征提取单元。
46.第一特征提取单元用于提取监测视频中单帧图像的第一表观特征或者第二表观特征,并将第一表观特征或者第二表观特征发送到分析判断模块100进行预测分析;第二特征提取单元用于提取监测视频中多帧图像的像素光流特征,并将像素光流特征传输到分析判断模块100进行预测分析。
47.在一个实施方式中,利用卷积神经网络模型或者残差网络模型算法获取第一表观特征。将利用fpn算法从第一表观特征中提取的分辨率及尺寸最大的多尺度表观特征作为第二表观特征为。
48.本实施方式中的卷积神经网络模型采用可行变卷积提取第一表观特征,提高帧图
像中感兴趣物体运动细节的提取效果。在每个采样点的位置都增加了一个偏移量。通过这些偏移变量,卷积核就可以在当前覆盖位置附近随意的采样,而不再局限于之前的规则格点,可以更集中于感兴趣或者是需要的区域,最大程度地保留有用特征信息。
49.fpn算法也即金字塔图像算法,以金字塔形状(自下而上)逐步降低,且来源于同一张原始图的图像分辨率集合。其通过梯次向下采样获得,直到达到某个终止条件才停止采样。层级越高,则图像越小,分辨率越低。
50.对帧图像中的感兴趣物体进行多尺度表观特征表示,从上述多尺度表观特征中提取强大的表观特征,也即第二表观特征,进行感兴趣区域及感兴趣物体可能出现的关键点位置预测,得到关键点位置。
51.在一个优选实施方式中,第二特征提取单元包括光流传感器电路310及光流控制电路320;光流传感器电路310与光流控制电路320电连接;光流传感器电路310用于对采集到的视频图像帧进行灰度、裁剪,生成预处理图像,并将预处理图像传输到光流控制电路320进行像素光流算法计算。
52.优选地,如图5和图6,图5是本实用新型中光流控制电路310电子元件连接示意图,图6是本实用新型中光流传感器电路320电子元件连接示意图,光流传感器电路310为vga型cmos传感器电路310,光流控制电路320包括光流控制芯片u1;光流传感器u2包括24引脚,光流控制芯片包括100引脚;其中,光流传感器u2的第19引脚、第21引脚、第22引脚、第20引脚、第18 引脚、第16引脚、第14引脚、第12引脚依次为像素数据引脚dcmi_d0~ dcmi_d7,分别与光流控制芯片u1的第63引脚、第64引脚、第97引脚、第 98引脚、第3引脚、第92引脚、第4引脚、第5引脚连接;光流传感器u2的第9引脚、第7引脚、第17引脚依次为行同步信号引脚、帧同步信号引脚、像素时钟引脚,分别与控制芯片u1的第29引脚、第93引脚、第31引脚连接。
53.光流传感器u2提供全像素、二次采样、窗口化或缩放的8位或者10位图像,可以在vga分辨率下,以每秒60帧的速率采集图像,可以自主设定图像的像素、格式以及帧率等,输出图像功能包括曝光选择、伽马、缺陷像素消除、噪声抑制等。
54.光流控制芯片u1主要负责光流算法实现,获取感兴趣物体的光流信息。
55.在一个优选实施方式中,利用循环神经网络模型算法或者lstm算法从监测视频中的多帧图像提取像素光流特征。
56.lstm算法即长记忆神经网络算法,本技术中的lstm算法加入随机扰动项,使得算法快速收敛,提高光流预测效果,具体地:选取小批次随机梯度下降算法更新初始权重;构建随机扰动参数矩阵;将随机扰动参数矩阵与输入值权重求和得新的权重;将新的权重带入lstm算法进行光流预测。
57.在一个实施方式中,监测系统进一步包括检测模块400;检测模块400用于对喉罩通气关键点位置进行漏气、返流进行异常检测,对喉罩声门710左右及前后位移进行异常检测。
58.在预测气泡产生的关键点位置,也就是因返流或者漏气产生气泡的位置后,此时需要对喉罩进行异常检测,检测喉罩声门710区域左右及前后是出现位置的改变,喉罩本身是否漏气,是否因位移产生返流等等。
59.在一个实施方式中,监测系统进一步地包括定量分析模块500;定量分析模块500用于根据一定运行时间内的感兴趣光流信息对患者的呼吸频率进行分析计算,获取患者呼
吸频率。
60.在有的实施方式中,监测系统进一步地包括对比模块600;对比模块600用于将监测到的呼吸频率参数与呼吸机参数进行比较分析,以确定喉罩通气是否异常。
61.监测系统检测到的量化参数,例如呼吸频率,应该与呼吸机参数保持一致,两者不一致说明喉罩通气出现了问题。
62.对于本技术中的喉罩通气还可以通过如下方法进行监测,监测方法包括:
63.步骤100、对喉罩通气进行连续监测,获取监测视频;
64.步骤200、对监测视频中的单帧图像的感兴趣物体的关键位置进行预测,获取第一预测位置;
65.步骤300、对监测视频中的多帧图像进行运动预测,获取预测运动信息;
66.步骤400、根据第一预测位置及预测运动信息,获取感兴趣光流信息;
67.步骤500、利用感兴趣光流信息获取患者呼吸频率。
68.监测方法还可以包括:
69.步骤600、将监测到的量化参数与呼吸机通气参数进行比较分析;
70.步骤700、根据比较分析结果确定喉罩通气是否出现异常。
71.监测方法还可以包括:
72.步骤800、根据获取的第一预测位置,对喉罩通气进行异常检测。
73.步骤800可以包括:
74.步骤810、检测喉罩声门710510区域左右及前后位移信息;
75.步骤820、检测喉罩的漏气及返流信息。
76.步骤200可以包括:
77.步骤210、利用卷积神经网络模型或者残差网络模型算法获取单帧图像的第一表观特征;
78.步骤220、对第一表观特征进行区域检测及关键点检测,获取第一预测位置。
79.步骤220可以包括:
80.步骤221、确定可能出现感兴趣物体的多个关键点位置;
81.步骤222、利用卷积神经网络或者残差网络模型算法对第一表观特征进行解码,获取通气过程中的感兴趣区域及对应的第一预测位置。
82.利用卷积神经网络模型对帧图像中的表观特征进行还原,得到感兴趣物体出现的关键点位置。
83.步骤200还可以包括:
84.步骤230、利用fpn算法从第一表观特征中提取多尺度表观特征;
85.步骤240、从多尺度表观特征中提取分辨率及尺寸最大的表观特征,获取第二表观特征;
86.步骤250、利用第二表观特征进行区域检测及关键点检测,获取第一预测位置。
87.步骤300可以包括:
88.步骤310、利用lstm算法提取多帧图像的像素光流特征;
89.步骤320、对像素光流进行光流预测,生成预测运动信息。
90.实施本实用新型所述的一种喉罩通气监测系统,通过获取感兴趣物体(例如气泡)
关键点位置(例如声门710位置、小角结节730处或者楔形结节720 处等)及其光流信息,对关键点位置的喉罩通气异常情况进行定性和定量分析,根据上述光流信息计算分析喉罩通气定量参数(呼吸频率),将呼吸频率参数与呼吸机的通气参数进行对比,获取喉罩当前通气情况,及时发现喉罩的位移或者患者呼吸不规则的情况,发现可能存在的误吸及返流情况,提醒监测人及时进行检查,保障喉罩通气的安全。
91.以上仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。