一种基于sumo仿真的车辆疏散方案生成与可视化方法
技术领域
1.本发明涉及交通仿真技术领域,包含一种考虑时间因素的车辆疏散方案生成方法,和一种利用sumo仿真对方案进行可视化、预估的方法。
背景技术:
2.应急交通疏散问题是指在城市发生突发公共事件时,通过道路将待疏散区域的人群和交通流疏散至安全区域,以避免或减少因紧急情况而造成的人员伤亡和财产损失。突发公共事件的定义是:突然发生,造成或者可能造成重大人员伤亡、财产损失、生态环境破坏和严重社会危害,危及公共安全的紧急事件。由于其发生快、损害大以及损害程度会随时间持续扩大的特性,应急交通疏散问题的解决目标通常是在尽可能短的时间内完成人员及交通流的疏散过程。车流仿真是指利用计算机技术,对车辆流在真实路网上转移时产生的动作进行计算并模拟显示,它是交通仿真的一个重要分支。
3.国内对于突发公共事件的应急疏散预案体系已经初步建立起来,但研究起步相对国外略晚,对突发公共事件的应急预案评价的研究仍处于起步阶段。一方面,虽然近年来有更多的学者开始研究道路网上的交通流疏散问题,但是国内的大多数研究还是集中在建筑物内的人群疏散问题。另一方面,大多数预案内容缺乏检验,无法验证其实用性、可行性。本发明提出了一种基于sumo仿真的车辆疏散方案生成与可视化方法,利用接近真实的地图数据资源,在考虑到距离、速度、等待时间因素情况下生成车辆疏散方案,然后利用sumo仿真对方案进行可视化从而实现模拟预估的目的。
技术实现要素:
4.本发明的目的主要针对上述应急疏散方案的局限性,提出一种基于sumo仿真的车辆疏散方案生成与可视化方法。旨在考虑到距离、时间、车辆速度多方面要素生成车辆应急疏散方案,并利用sumo仿真及其接口对疏散过程实现可视化,并通过仿真结果选择最优的车辆疏散方案。
5.本发明的一种基于sumo仿真的车辆疏散方案生成与可视化方法,包括以下步骤:
6.s1.构建仿真所需的路网,设置初始参数;
7.s2.读取路网数据,筛选、分类并生成数据对象;
8.s3.利用步骤s1的初始参数和步骤s2的数据对象,计算车辆应急疏散方案;
9.s4.根据步骤s3疏散方案生成车辆路径文件,以实时调控方式进行仿真跟踪。
10.步骤s1包含如下步骤:
11.s1.1.使用所需路网的经纬度左、下、右、上边界值lng
l
、latb、lngr、lat
t
(以地理坐标系为单位),在开源地图网站openstreetmap的公开接口下载路网数据;
12.s1.2.使用sumo内置的netconvert组件转换路网数据格式,再使用netedit组件将路口的连接关系修正至与真实世界相同,并输入真实环境的道路平均速度、交通灯变换模式等参数;
13.s1.3.设置仿真的初始参数(均以米或米每秒为单位),其中包括:路网数据;疏散起始点 p={p1,p2,...,pn},其中表示取正整数,疏散半径dr;疏散车辆数量numv;并指定疏散方案生成方法;其中,本发明的疏散方案生成方法共四种,如表1所示:
[0014][0015]
表1
[0016]
步骤s2包含如下步骤:
[0017]
s2.1.根据路网数据,从对应的.net.xml文件中读取出边(edge)对象、节点(node/junction) 对象、交通灯逻辑(tllogic)对象以及连接(connect)对象;
[0018]
s2.2.将步骤s2.1的边对象根据其属性进行筛选,过滤无法行驶目标车辆类型的边,得到当前路网地图上可以行驶目标车辆类型的边,记作e;对于e中的每条边ei,根据其长度和平均行车速度得到平均行车耗时
[0019][0020]
s2.3.将步骤s2.1的节点对象记作n,每个节点ni包含坐标信息
[0021]
s2.4.将步骤s2.1的交通灯逻辑对象记作r;对于r中的每个交通灯逻辑ri,根据其逻辑相位的持续时间和交通灯状态,可以计算得到其平均等待耗时
[0022][0023]
其中,r
w,v
表示从ew到ev的交通灯逻辑;表示r
w,v
中包含的逻辑相位的数量;表示r
w,v
中第i条逻辑相位的绿灯时间,相应的和表示黄灯时间和红灯时间;
[0024]
s2.5.将步骤s2.1的连接对象记为c,每个连接c
w,v
表示从ew到ev的连接状态,包含
交通灯逻辑r
w,v
。
[0025]
步骤s3所述的疏散方案是考虑行车耗时和疏散耗时的a-star算法(简称a*dt),包含如下步骤:
[0026]
s3.1.对于每个疏散起始点pi,将其记为p0表示当前疏散路径的起始点;找到其所在的边 e0和与该边行驶方向相连的节点n0,其含义为道路和与道路驶向相连的交叉口;得到边e0对应的平均行车耗时计算初始的已知状态g0、初始的预估状态h0、初始的总状态f0(gj, hj和fj表示第j条疏散路径的对应状态)和初始的备选集合s,计算公式如下:
[0027][0028][0029]
f0=g0 h0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0030]
s={(f0,null,e0)}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0031]
其中,v表示车辆的预计行驶速度;s={(x,y,z)}的含义是对于祖先边为y而孩子边为z的疏散方案,此时的预计耗时为x;由于当前疏散方案的孩子边e0是初始边,因此其不存在祖先边,用null表示空数据;
[0032]
s3.2.如果还未找到一条可行的疏散路径并且s非空,那么从s中取出f最小的一项数据,并将其加入已用集合q,计算公式如下:
[0033][0034]jargmin
=argmin(fj∈s(j))
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0035]
q=q s(j
argmin
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0036]
s=s-s(j
argmin
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0037]
其中,s(j)表示在集合s中找到第j条疏散方案,表示在第j条疏散方案中的第i次序的边,同时其属于e中的第b条边;q s表示取两个集合的并集,q-s表示取前者相较后者的差集;
[0038]
s3.3.通过当前边的连接关系cb可以得到后继边其含义为车辆由该道路进入交叉口后可以驶向的其它道路;对于的每条后继边ed,通过它与当前边的连接关系c
b,d
可以得到相应的信号灯逻辑r
b,d
,表示通过边eb到ed经过的信号灯规则;计算当前的已知状态 g',计算公式如下:
[0039][0040]
其中,α是控制系数,用于表示在g'中的重要性,该值越大表示信号灯规则的重要性越高,反之则表示道路行驶状况的重要性越高;
[0041]
s3.4.通过当前边后继边ed、后继节点nd和已知状态g',计算当前节点nb到疏散起始点p0的距离得到新一轮的估值状态f',计算公式如下:
[0042]
[0043][0044]
f'=g' h'
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0045]
s3.5.当时,表示找到一条可行且较短的疏散路径方案,此时根据当前边和已用集合q找到整条疏散路径;否则,更新备选集合s,并回到步骤s3.2;当前公式如下:
[0046][0047]
其中,q(j)2表示公式(7)右侧的第2项,即第j条疏散方案的祖先边;另外,部分的公式将不断计算直到eb=null,此时的tr表示一条可行的疏散路径方案;
[0048]
s3.6.对于每个疏散起始点pi得到的疏散路径方案,将其汇总为最终的疏散路径集合,记为trs。
[0049]
步骤s4具体包含:
[0050]
s4.1.通过步骤s3生成共计条疏散路径trs,按照循环顺序将路径分配给从1至numv的车辆;将该分配方案保存为.rou.xml格式文件;
[0051]
s4.2.结合步骤s1的路网数据与步骤s3的疏散路径,在sumo的traci接口上进行二次开发,构建车辆的应急疏散环境,实现车辆和车道级别的信息采集;
[0052]
s4.3.在每个仿真步内,从接口获取内容,并以数据方式展示仿真状态和疏散进度,包括车辆速度、道路平均速度、车辆疏散完成百分比。
[0053]
本发明的工作原理是:利用接近真实的地图数据资源,考虑到距离、速度、等待时间因素生成车辆疏散方案,并利用sumo仿真对方案进行可视化。
[0054]
本发明的优点是:在考虑更多因素的情况下生成疏散方案,使得疏散方案更合理;利用 sumo仿真对方案进行可视化,有效验证疏散方案的可行性。
附图说明
[0055]
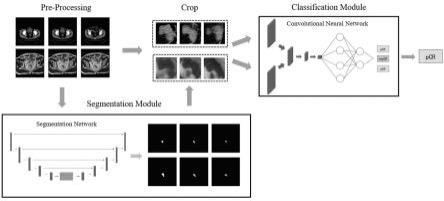
图1是本发明方法的结构图;
[0056]
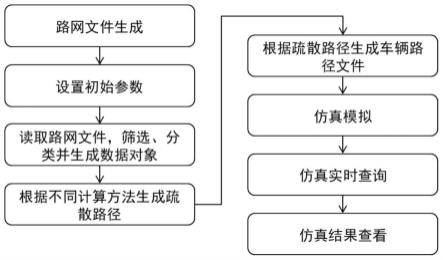
图2是本发明方法的数据处理和仿真模拟的总流程图;
[0057]
图3是本发明实施案例中实时状态查询模块的可视化界面;
[0058]
图4是本发明实施案例中实时状态查询模块的查询车辆可视化页面;
[0059]
图5是本发明实施案例中实时状态查询模块的查询真实道路可视化页面;
[0060]
图6是本发明实施案例中结果数据查询模块的可视化页面。
具体实施方式
[0061]
为了使本发明的目的、技术方案和优点更加清楚,下面将对本发明的具体实施方
式作进一步的详细描述。
[0062]
本发明实施例提供了一种基于sumo仿真的车辆疏散方案生成与可视化方法,系统结构如图1所示,路径生成流程如图2所示,可视化仿真控制流程如图3所示,该方法包括:
[0063]
s1.构建仿真所需的路网,设置初始参数,包含如下步骤:
[0064]
s1.1.使用所需路网的经纬度左、下、右、上边界值lng
l
、latb、lngr、lat
t
(以地理坐标系为单位),在开源地图网站openstreetmap的公开接口下载路网数据;
[0065]
s1.2.使用sumo内置的netconvert组件转换路网数据格式,再使用netedit组件将路口的连接关系修正至与真实世界相同,并输入真实环境的道路平均速度、交通灯变换模式等参数;
[0066]
s1.3.设置仿真的初始参数(均以米或米每秒为单位),其中包括:路网数据;疏散起始点 p={p1,p2,...,pn},其中表示取正整数,疏散半径dr;疏散车辆数量numv;并指定疏散方案生成方法。其中,疏散方案如表1所示:
[0067][0068]
表1
[0069]
s2.读取路网数据,筛选、分类并生成数据对象,包含如下步骤:
[0070]
s2.1.根据路网数据,从对应的.net.xml文件中读取出边(edge)对象、节点(node/junction) 对象、交通灯逻辑(tllogic)对象以及连接(connect)对象;
[0071]
s2.2.将步骤s2.1的边对象根据其属性进行筛选,过滤无法行驶目标车辆类型的边,得到当前路网地图上可以行驶目标车辆类型的边,记作e;对于e中的每条边ei,根据其长度和平均行车速度得到平均行车耗时
[0072][0073]
s2.3.将步骤s2.1的节点对象记作n,每个节点ni包含坐标信息
[0074]
s2.4.将步骤s2.1的交通灯逻辑对象记作r;对于r中的每个交通灯逻辑ri,根据其逻辑相位的持续时间和交通灯状态,可以计算得到其平均等待耗时
[0075][0076]
其中,r
w,v
表示从ew到ev的交通灯逻辑;表示r
w,v
中包含的逻辑相位的数量;表示r
w,v
中第i条逻辑相位的绿灯时间,相应的和表示黄灯时间和红灯时间;
[0077]
s2.5.将步骤s2.1的连接对象记为c,每个连接c
w,v
表示从ew到ev的连接状态,包含交通灯逻辑r
w,v
。
[0078]
s3.利用步骤s1的初始参数和步骤s2的数据对象,计算车辆应急疏散方案,以a*dt为例,包含如下步骤:
[0079]
s3.1.对于每个疏散起始点pi,将其记为p0表示当前疏散路径的起始点;找到其所在的边 e0和与该边行驶方向相连的节点n0,其含义为道路和与道路驶向相连的交叉口;得到边e0对应的平均行车耗时计算初始的已知状态g0、初始的预估状态h0、初始的总状态f0(gj, hj和fj表示第j条疏散路径的对应状态)和初始的备选集合s,计算公式如下:
[0080][0081][0082]
f0=g0 h0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0083]
s={(f0,null,e0)}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0084]
其中,v表示车辆的预计行驶速度;s={(x,y,z)}的含义是对于祖先边为y而孩子边为z的疏散方案,此时的预计耗时为x;由于当前疏散方案的孩子边e0是初始边,因此其不存在祖先边,用null表示空数据;
[0085]
s3.2.如果还未找到一条可行的疏散路径并且s非空,那么从s中取出f最小的一项数据,并将其加入已用集合q,计算公式如下:
[0086][0087]jargmin
=argmin(fj∈s(j))
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0088]
q=q s(j
argmin
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0089]
s=s-s(j
argmin
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0090]
其中,s(j)表示在集合s中找到第j条疏散方案,表示在第j条疏散方案中的第i次序的边,同时其属于e中的第b条边;q s表示取两个集合的并集,q-s表示取前者相较后者的差集;
[0091]
s3.3.通过当前边的连接关系cb可以得到后继边其含义为车辆由该道路进入交叉口后可以驶向的其它道路;对于的每条后继边ed,通过它与当前边的连接关系c
b,d
可以得到相应的信号灯逻辑r
b,d
,表示通过边eb到ed经过的信号灯规则;计算当前的已知
状态 g',计算公式如下:
[0092][0093]
其中,α是控制系数,用于表示在g'中的重要性,该值越大表示信号灯规则的重要性越高,反之则表示道路行驶状况的重要性越高;
[0094]
s3.4.通过当前边后继边ed、后继节点nd和已知状态g',计算当前节点nb到疏散起始点p0的距离得到新一轮的估值状态f',计算公式如下:
[0095][0096][0097]
f'=g' h'
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0098]
s3.5.当时,表示找到一条可行且较短的疏散路径方案,此时根据当前边和已用集合q找到整条疏散路径。否则,更新备选集合s,并回到步骤s3.2。当前公式如下:
[0099][0100]
其中,q(j)2表示公式(7)右侧的第2项,即第j条疏散方案的祖先边;另外,部分的公式将不断计算直到eb=null,此时的tr表示一条可行的疏散路径方案;
[0101]
s3.6.对于每个疏散起始点pi得到的疏散路径方案,将其汇总为最终的疏散路径集合,记为trs。
[0102]
s4.根据步骤s3疏散方案生成车辆路径文件,以实时调控方式进行仿真跟踪,包含如下步骤:
[0103]
s4.1.通过步骤s3生成共计条疏散路径trs,按照循环顺序将路径分配给从1至numv的车辆;将该分配方案保存为.rou.xml格式文件;
[0104]
s4.2.结合步骤s1的路网数据与步骤s3的疏散路径,在sumo的traci接口上进行二次开发,构建车辆的应急疏散环境,实现车辆和车道级别的信息采集;
[0105]
s4.3.在每个仿真步内,从接口获取内容,并以数据方式展示仿真状态和疏散进度,包括车辆速度、道路平均速度、车辆疏散完成百分比;
[0106]
s4.4.在四种疏散条件下对四种疏散路径生成方法进行了对比,结果如下所示:
[0107]
序号疏散地图疏散距离(米)疏散车辆(辆)算法疏散耗时(秒)1黄龙体育中心1000.0100a*d6542黄龙体育中心1000.0100a*dt1091
3黄龙体育中心1000.0100dijkstra2264黄龙体育中心1000.0100bfs6435黄龙体育中心2000.0100a*d8456黄龙体育中心2000.0100a*dt4837黄龙体育中心2000.0100dijkstra5048黄龙体育中心2000.0100bfs9339杭州奥体中心1000.0100a*d41010杭州奥体中心1000.0100a*dt40911杭州奥体中心1000.0100dijkstra30412杭州奥体中心1000.0100bfs16913浙江工业大学体育场1000.0100a*d42214浙江工业大学体育场1000.0100a*dt42215浙江工业大学体育场1000.0100dijkstra40716浙江工业大学体育场1000.0100bfs1518
[0108]
表2。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。