1.本发明属于隧道施工技术领域,更具体地,涉及一种隧道多级旋转制动台车及其施工方法。
背景技术:
2.地铁隧道施工台车是隧道施工过程中二次衬砌中使用的专用设备,用于对隧道内壁的衬砌施工。目前我国的地铁隧道因施工环境、施工要求等差异其截面轮廓也往往不同,所以衬砌台车的所有部件需要根据不同的轮廓截面进行重新设计和加工,从而大大的增加了设计周期以及加工周期。
3.为了解决上述问题,专利文献cn 111997655a公开了一种能在隧道内旋转混凝土二衬模板台车的施工方法,将可折叠混凝土二衬模板台车安装在直线轨道上;驱动可折叠混凝土二衬模板台车上的直线行走系统,使其运行至待旋转的隧道段内;将可折叠混凝土二衬模板台车折叠;在混凝土二衬模板台车安装支撑装置,通过支撑装置将折叠后的混凝土二衬模板台车支撑至脱离直线轨道;安装圆弧形导轨;在折叠后的混凝土二衬模板台车的两个下纵梁上分别配合安装至少两个旋转轮,相邻的两个旋转轮间隔设置;收起支撑装置,使旋转轮落入圆弧形轨道上;安装驱动装置,驱动旋转轮移动,使折叠后的混凝土二衬模板台车顺着圆弧形轨道移动至待施工方向。除此之外,地铁隧道的轮廓截面较小,现有技术中的隧道衬砌台车净空小、脱模量小,衬砌台车在隧道进行施工时即使小型装载机也不能通行,二次衬砌钢架结构一般采用人工搬运、拼装施工,此外,钻炮眼等作业,大多是人工进行,由于钢架结构笨重,在隧道狭小空间内人工搬运拼装,不仅二次衬砌、钻炮眼等施工精低、效率低,而且给隧道施工带来很大的不便,延长了隧道施工的周期,此外存在较多安全隐患,极易造成施工事故,影响施工质量及效率。
技术实现要素:
4.针对现有技术的以上缺陷或改进需求,本发明提供一种隧道多级旋转制动台车及其施工方法,将第一伸缩杆下放至一定高度,伸长至合适长度后,通过设于第一旋转制动机构上的第一装夹单元实现对钢架一端进行装夹精确定位,通过第一端头旋转装置驱动所述可绕第一制动位移滑槽转动一定角度直至钢架运动至隧道一次衬砌廓形匹配位置定位;进而通过所述第二旋转制动机构驱动钢架上升至第三旋转制动机构,继续由第三旋转制动机构上升至隧道一次衬砌廓形位置,依次循环将二次衬砌钢架转动、驱动上升至隧道一次衬砌廓形匹配位置,实现多段二次衬砌钢架廓形自动精确对位、焊接、成型,不仅实现了隧道二次衬砌钢架的自动、快速、精确定位施工,而且大大提高施工效率,通过机械自动化台车施工,大幅降低工人劳动强度,降低施工安全风险。
5.为了实现上述目的,按照本发明的一个方面,提供一种隧道多级旋转制动台车,包括台车主体结构(100),还包括设于所述台车主体结构(100)1底部的第一旋转制动机构(200),设于所述台车主体结构(100)中部的第二旋转制动机构(300)及设于所述台车主体
结构(100)顶部的第三旋转制动机构(400);其中,
6.所述第一旋转制动机构(200)包括设于所述台车主体结构(100)底部一侧的第一制动位移滑槽(201)、设于该第一制动位移滑槽(201)上的第一端头旋转装置(202)、与所述第一制动位移滑槽(201)滑动连接的第一伸缩杆(204)以及设于第一伸缩杆(204)一端的第一装夹单元(203),设于第一制动位移滑槽(201)内的旋转制动装置(206),所述第一伸缩杆(204)通过第一旋转接口(205)与所述旋转制动装置(206)连接,
7.将所述第一伸缩杆(204)下放至一定高度伸长至合适长度后,通过第一装夹单元(203)实现对钢架一端进行装夹精确定位,通过第一端头旋转装置(202)驱动所述可绕第一制动位移滑槽(201)转动一定角度直至运动至隧道廓形匹配位置定位;进而通过所述第二旋转制动机构(300)驱动施工对象上升至第三旋转制动机构(400),继续由第三旋转制动机构(400)上升至隧道砌廓形位置,依次循环将施工对象转动、驱动上升至隧道廓形匹配位置,实现多段施工对象廓形自动精确定位,施工成型。
8.进一步地,所述第一装夹单元(203)包括两部分扣合结构,第一部分包括与所述第一伸缩杆(204)一端连接的第一固定主板(2031),该第一固定主板(2031)内设有至少一路第一固定板滑槽(2032)、与该第一固定板滑槽(2032)匹配设置的第一伸缩卡夹(2033)。
9.进一步地,所述第一部分包括与所述第一固定主板(2031)垂直连接且通过所述第一伸缩卡夹(2033)连接的两侧夹板(2034)。
10.进一步地,所述第一装夹单元(203)第二部分,包括第一固定小主板(2037),设于该第一固定小主板(2037)上的第一固定滑槽及伸缩卡夹(2036)。
11.进一步地,第二部分包括垂直设于所述第一固定小主板(2037)两侧的两侧小夹板(2035),以及设于所述第一固定小主板(2037)上的第一伸缩固定装置(2038)。
12.进一步地,所述第二旋转制动机构(300)包括第二制动位移滑槽(301),与该第二制动位移滑槽(301)连接的第二伸缩杆(302)及设于所述第二伸缩杆(302)一端的第二装夹单元(303)。
13.进一步地,所述第二装夹单元(303)包括对称设置的第二固定板(3031),与第二伸缩杆(302)连接的第二固定板内侧安装的制动滚轮(3033),设于另一侧第二固定板上的普通滚轮(3032)。
14.进一步地,所述第二装夹单元(303)包括分别设于第二固定板(3031)两侧的第二伸缩固定盒(2036)。
15.进一步地,所述第二装夹单元(303)包括设于该第二伸缩固定盒(2035)上的第二伸缩卡夹(2034),以及设于所述第二伸缩固定盒(2036)上的第二伸缩固定装置(2035)。
16.按照本发明的第二个方面,提供一种隧道多级旋转制动台车施工方法,包括如下步骤:
17.s100:将第一旋转制动机构的伸缩杆放下,伸长至合适长度,旋转第一旋转制动机构对地上钢架一端进行稳固,然后启动第一旋转制动机构,使钢架立起在隧道开挖轮廓线内侧,再使用上方及中间部位伸缩杆和第二旋转制动机构对中间和上方的钢架进行夹紧固定;
18.s200:使用第二旋转制动机构启动滚轮制动,对固定好的钢架进行滚轮传输至拱顶上方与两侧钢架对接,通过伸缩杆来调节与隧道开挖轮廓线的距离,在同一断面钢架调
节好后,可进行下一步焊接工作;
19.s300:通过台车上安装的制动滑槽,对立架工作面进行移动,以此循环工作;
20.s400:在钻炮眼工序中,将钻眼风镐支撑杆稳固在每一层的装夹单元内侧,通过调节装夹单元方向,伸缩杆长短以及制动滑槽来进行控制钻眼风镐的位置及方向;
21.s500:使用完后,通过连接台车的制动滑槽及旋转制动装置将伸缩杆收回捆绑固定在台车架内侧,防止被破坏。
22.总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
23.1.本发明的多级旋转制动台车,将第一伸缩杆下放至一定高度,伸长至合适长度后,通过设于第一旋转制动机构上的第一装夹单元实现对钢架一端进行装夹精确定位,通过第一端头旋转装置驱动所述可绕第一制动位移滑槽转动一定角度直至钢架运动至隧道一次衬砌廓形匹配位置定位;进而通过所述第二旋转制动机构驱动钢架上升至第三旋转制动机构,继续由第三旋转制动机构上升至隧道一次衬砌廓形位置,依次循环将二次衬砌钢架转动、驱动上升至隧道一次衬砌廓形匹配位置,实现多段二次衬砌钢架廓形自动精确对位、焊接、成型,不仅实现了隧道二次衬砌钢架的自动、快速、精确定位施工,而且大大提高施工效率,通过机械自动化台车施工,大幅降低工人劳动强度,降低施工安全风险。
24.2.本发明的多级旋转制动台车,通过所述第一端头旋转装置驱动第一伸缩杆转动,带动钢架旋转至隧道一次衬砌廓形匹配的位置定位,实现对钢架的自动化转动,精确定位,可以及大幅度优化人力,提高工作安全系数,提高工程进度和效率,辅助钻眼工序,半自动化立架工序,既能避免立架时上方围岩不稳落石伤人,提高立架精度和效率。
25.3.本发明的多级旋转制动台车,根据钢架的尺寸规格,灵活调整两侧夹板沿着第一伸缩卡夹运动至合适宽度位置,确保两侧夹板和第一固定主板包裹钢架端部;再将第二部分与第一部分配合连接,再将两侧小夹板拉伸一定范围后夹在第一固定小主板外侧,对其进行二次稳固,通过第一伸缩固定装置对两侧小夹板进行再次受力收紧,达到稳固的效果,确保其旋转运动过程中稳定性。
26.4.本发明的多级旋转制动台车,通过第一旋转制动机构旋转运动至第二旋转制动机构后,通过第二伸缩卡夹将两侧第二固定板进行固定,通过在第二伸缩固定盒内部的第二伸缩固定装置对第二伸缩卡夹进行受力,从而使第二固定板稳固,然后通过制动滚轮与普通滚轮配合,实现对钢架的提升输送至隧道二次衬砌廓形位置实现精确定位,并与第一旋转制动机构旋转运输上来的其他钢架结构精确对接,实现焊接成型。
附图说明
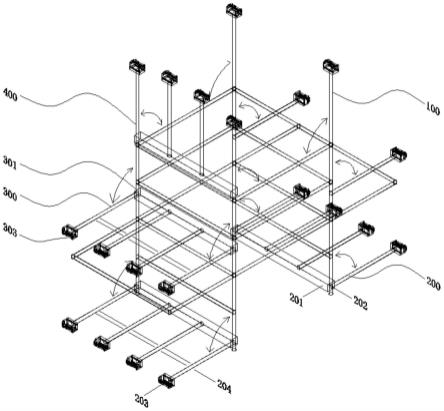
27.图1为本发明实施例一种隧道多级旋转制动台车总体结构示意图;
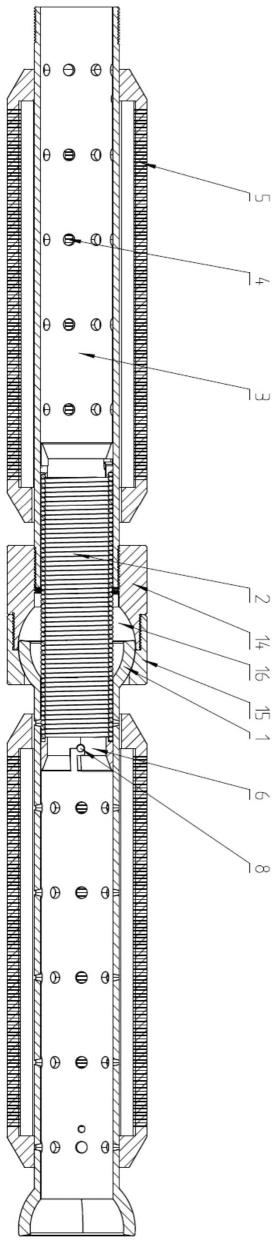
28.图2为本发明实施例中第一旋转制动机构结构示意图;
29.图3为本发明实施例中第一装夹单元组成结构示意图;
30.图4为本发明实施例中第二旋转制动机构结构示意图;
31.图5为本发明实施例中第二装夹单元组成结构示意图;
32.图6为本发明实施例中第二固定板及滚轮组成结构示意图;
33.图7为本发明实施例中右侧面第二伸缩卡夹组成结构示意图;
34.图8为本发明实施例中左侧面第二伸缩卡夹组成结构示意图;
35.图9为本发明实施例一种隧道多级旋转制动台车施工方法流程图。
36.在所有附图中,同样的附图标记表示相同的技术特征,具体为:100-台车主体结构、200-第一旋转制动机构、201-第一制动位移滑槽、202-第一端头旋转装置、203-第一装夹单元、2031-第一固定主板、2032-第一固定板滑槽、2033-第一伸缩卡夹、2034-两侧夹板、2035-两侧小夹板、2036-第一固定滑槽及伸缩卡夹、2037-第一固定小主板、2038-第一伸缩固定装置、204-第一伸缩杆、205-第一旋转接口、206-旋转制动装置、300-第二旋转制动机构、301-第二制动位移滑槽、302-第二伸缩杆、303-第二装夹单元、3031-第二固定板、3032-普通滚轮、3033-制动滚轮、3034-第二伸缩卡夹、3035-第二伸缩固定装置、2036-第二伸缩固定盒、400-第三旋转制动机构。
具体实施方式
37.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
38.如图1所示,本发明实施例提供一种隧道多级旋转制动台车,其包括台车主体结构100,可在掌子面台车底部、中部、上方均可安装旋转制动机构,具体而言包括设于所述台车主体结构100底部的第一旋转制动机构200、设于所述台车主体结构100中部的第二旋转制动机构300及设于所述台车主体结构100顶部的第三旋转制动机构400。所述第一旋转制动机构200包括设于所述台车主体结构100底部一侧的第一制动位移滑槽201、设于该第一制动位移滑槽201上的第一端头旋转装置202、与所述第一制动位移滑槽201滑动连接的第一伸缩杆204以及设于第一伸缩杆204一端的第一装夹单元203。将第一伸缩杆204下放至一定高度,伸长至合适长度后,通过设于第一旋转制动机构200上的第一装夹单元203实现对钢架一端进行装夹精确定位,通过第一端头旋转装置202驱动所述可绕第一制动位移滑槽201转动一定角度直至钢架运动至隧道一次衬砌廓形匹配位置定位;进而通过所述第二旋转制动机构300驱动钢架上升至第三旋转制动机构400,继续由第三旋转制动机构400上升至隧道一次衬砌廓形位置,依次循环将二次衬砌钢架转动、驱动上升至隧道一次衬砌廓形匹配位置,实现多段二次衬砌钢架廓形自动精确对位、焊接、成型,不仅实现了隧道二次衬砌钢架的自动、快速、精确定位施工,而且大大提高施工效率,通过机械自动化台车施工,大幅降低工人劳动强度,降低施工安全风险。
39.如图2所示,所述第一旋转制动机构200包括设于第一制动位移滑槽201内的旋转制动装置206,所述第一伸缩杆204通过第一旋转接口205与所述旋转制动装置206连接,可通过所述第一端头旋转装置202驱动第一伸缩杆204转动一定角度,带动钢架旋转至隧道一次衬砌廓形匹配的位置定位,实现对钢架的自动化转动,精确定位。
40.在本发明实施例中,如图3所示,第一装夹单元203包括两部分扣合结构,第一部分包括与所述第一伸缩杆204一端连接的第一固定主板2031,该第一固定主板2031内设有至少一路第一固定板滑槽2032、与该第一固定板滑槽2032匹配设置的第一伸缩卡夹2033,与所述第一固定主板2031垂直连接且通过所述第一伸缩卡夹2033连接的两侧夹板2034;第二
部分则包括第一固定小主板2037,设于该第一固定小主板2037上的第一固定滑槽及伸缩卡夹2036,垂直设于所述第一固定小主板2037两侧的两侧小夹板2035,以及设于所述第一固定小主板2037上的第一伸缩固定装置2038。根据钢架的尺寸规格,灵活调整两侧夹板2034沿着第一伸缩卡夹2033运动至合适宽度位置,确保两侧夹板2034和第一固定主板2031包裹钢架端部;再将第二部分与第一部分配合连接,再将两侧小夹板2035拉伸一定范围后夹在第一固定小主板2037外侧,对其进行二次稳固,通过第一伸缩固定装置2038对两侧小夹板2035进行再次受力收紧,达到稳固的效果,确保其旋转运动过程中稳定性。
41.如图4-图8所示,本发明的实施例中,第二旋转制动机构300和第三旋转制动机构400结构类似,如图4所示,以第二旋转制动机构300为例,其包括第二制动位移滑槽301,与该第二制动位移滑槽301连接的第二伸缩杆302以及设于所述第二伸缩杆302一端的第二装夹单元303。如图5所示,第二装夹单元303包括对称设置的第二固定板3031,与第二伸缩杆302连接的第二固定板内侧安装的制动滚轮3033,设于另一侧第二固定板上的普通滚轮3032,分别设于第二固定板3031两侧的第二伸缩固定盒2036,设于该第二伸缩固定盒2036上的第二伸缩卡夹2034,以及设于所述第二伸缩固定盒2036上的第二伸缩固定装置3035。通过第一旋转制动机构200旋转运动至第二旋转制动机构300后,通过第二伸缩卡夹2034将两侧第二固定板3031进行固定,通过在第二伸缩固定盒2036内部的第二伸缩固定装置3035对第二伸缩卡夹2034进行受力,从而使第二固定板3031稳固,然后通过制动滚轮3033与普通滚轮3032配合,实现对钢架的提升输送至隧道二次衬砌廓形位置实现精确定位,并与第一旋转制动机构200旋转运输上来的其他钢架结构精确对接,实现焊接成型。
42.如图9所示,本发明另一个实施例中,提供一种隧道二次衬砌多级旋转制动台施工方法,包括如下步骤:
43.步骤1:将第一旋转制动机构的伸缩杆放下,伸长至合适长度,旋转第一旋转制动机构对地上钢架一端进行稳固,然后启动第一旋转制动机构200,使钢架立起在隧道开挖轮廓线内侧,再使用上方及中间部位伸缩杆和第二旋转制动机构对中间和上方的钢架进行夹紧固定;
44.步骤2、如果钢架为分段式,则使用第二旋转制动机构启动滚轮制动,对固定好的钢架进行滚轮传输至拱顶上方与两侧钢架对接,通过伸缩杆来调节与隧道开挖轮廓线的距离,在同一断面钢架调节好后,可进行下一步焊接工作;
45.步骤3、通过台车上安装的制动滑槽,对立架工作面进行移动,以此循环工作;
46.步骤4、在钻炮眼工序中,可以将钻眼风镐支撑杆稳固在每一层的装夹单元内侧,通过调节装夹单元方向,伸缩杆长短以及制动滑槽来进行控制钻眼风镐的位置及方向;
47.步骤5、在使用完后,可以通过连接台车的制动滑槽及旋转制动装置将伸缩杆收回捆绑固定在台车架内侧,防止被破坏。
48.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。