1.本技术主要涉及工业机器人领域,具体地涉及一种末端工具有效工作空间的规划方法、装置及存储介质。
背景技术:
2.在机械臂的实际应用场景中,往往对于末端工具朝向有确定的约束需求,以6轴手术机械臂为例,根据手术的需求限制了末端工具(如针筒针头,下文中写为针头)z轴的朝向,但是不限制其x轴和y轴的朝向,即针头可以360
°
绕其z轴旋转。在保证工件朝向的情况下,工具中心点可以达到的空间范围被定义为有效工作空间。因此在设计机械臂结构时需要计算针头的有效工作空间,即满足针头在设计工况下所需求的全部朝向的同时求得针头可以达到的有效空间范围。
3.cn111844027a公开了一种关于机械臂最优工作空间的确定方法及装置。该方法包括:根据目标机械臂的特征参数表建立目标机械臂的运动学方程,并获取目标机械臂的雅克比矩阵;根据特征参数表获取多个待确定参数组;根据运动学方程、雅克比矩阵和多个待确定参数组,分别获取每个待确定参数组对应的末端笛卡尔空间和末端笛卡尔空间的雅克比矩阵条件数;根据端笛卡尔空间和末端笛卡尔空间的雅克比矩阵条件数确定目标机械臂的最优工作空间。该方法仅考虑了机械臂的机械结构参数的限制,并未考虑末端工具朝向的约束,因此无法适用于对末端工具有朝向需求的场景。
4.因此,亟需一种末端工具有效工作空间的规划方法、装置及存储介质。
5.申请内容
6.本技术所要解决的技术问题是提供一种末端工具有效工作空间的规划方法、装置及存储介质,解决现有工作空间确定方法无法满足末端工具有朝向需求的场景的问题。
7.为了解决上述技术问题,本技术提供一种末端工具有效工作空间的规划方法,包括:设置基坐标系中的第一坐标轴的极限值为有效工作空间的设计变量,其中所述极限值包括极限最大值和极限最小值;基于约束条件确定所述有效工作空间的非线性等式,以及根据所述非线性等式确定所述设计变量的目标函数,其中所述约束条件包括末端工具的极限朝向的空间向量集合;在基坐标系中的第二坐标轴和第三坐标轴组成的平面上等间隔取点,通过优化所述目标函数计算出所述平面上每个点对应的所述末端工具所能达到的第一坐标轴上的最大值和最小值;根据所述平面上所有的点对应的所述最大值和所述最小值确定最大有效工作空间。
8.在本技术的一实施例中,所述约束条件还包括机械臂的结构参数和末端工具参数。
9.在本技术的一实施例中,所述非线性等式为:
10.11.其中,t
tool
为基坐标系到工具坐标系的坐标转换矩阵,f(
·
)是机械臂运动学正解函数,q是机械臂轴角向量,tool是末端工具参数,[z1,z2,z3]为所述末端工具的末端朝向在基坐标系下的投影,[xq,yq,zq]为根据机械臂轴角向量确定的基坐标系下的坐标。
[0012]
在本技术的一实施例中,所述目标函数为:
[0013][0014][0015]
其中,min(x)为第一坐标轴的最小值,max(x)为第一坐标轴的最大值,f(
·
)是第一坐标轴的值与机械臂轴角向量的关系函数,qa是对应第一坐标轴的最小值的最优机械臂轴角向量,qb是对应第一坐标轴的最大值的最优机械臂轴角向量。
[0016]
在本技术的一实施例中,通过优化所述目标函数计算出所述平面上每个点对应的所述末端工具所能达到的第一坐标轴上的最大值和最小值的步骤包括:以下列等式约束与不等式约束为所述目标函数的kkt条件,通过顺序二次规划优化所述目标函数得到每个点对应的一组最优机械臂轴角向量;
[0017][0018]qmin
<q<q
max
[0019]
其中,[z1,z2,z3]为所述末端工具的末端朝向在基坐标系下的投影,[z
n1
,z
n2
,z
n3
]为第n组限制的末端朝向在基坐标系下的投影,yq和zq为根据所述机械臂轴角向量确定的第二坐标轴上的坐标和第三坐标轴上的坐标,y和z为所述平面上的点在第二坐标轴上的坐标和在第三坐标轴上的坐标,q
min
为机械臂关节的最小可达角度所构成的向量,q
max
为机械臂关节的最大可达角度所构成的向量,q是机械臂轴角向量;
[0020]
以所述一组最优机械臂轴角向量对应的的一组第一坐标轴的值的其中一个为所述最大值,另一个为所述最小值。
[0021]
在本技术的一实施例中,在基坐标系中的第二坐标轴和第三坐标轴组成的平面上等间隔取点的步骤包括:在所述第二坐标轴上从原点开始以第一步长递增确定各个点的第二坐标;在所述第三坐标轴上从原点开始以第二步长递增确定各个点的第三坐标,直到由所述第二坐标和所述第三坐标确定的点对应的第一坐标轴的最大值和最小值的差值小于第一阈值,则在所述第三坐标轴上从原点开始以第二步长递减继续确定各个点的第三坐标。
[0022]
在本技术的一实施例中,末端工具有效工作空间的规划方法还包括:根据工况需求确定所述末端工具在所述第二坐标轴所需要的第一工作范围和所述末端工具在所述第三坐标轴所需要的第二工作范围,根据所述第一工作范围和所述第二工作范围在基坐标系中的第二坐标轴和第三坐标轴组成的平面上等间隔取点。
[0023]
在本技术的一实施例中,根据所述第一工作范围和所述第二工作范围在基坐标系中的第二坐标轴和第三坐标轴组成的平面上等间隔取点的步骤包括:在所述第二坐标轴上
从原点开始到二分之一的所述第一工作范围内以第一步长递增确定各个点的第二坐标,其中所述有效工作空间在第二坐标轴上关于原点对称;在所述第三坐标轴上从原点开始以所述第二工作范围为步长递增确定各个点的第三坐标,直到由所述第二坐标和所述第三坐标确定的点对应的第一坐标轴的最大值和最小值的差值小于第一阈值,则在所述第三坐标轴上从原点开始以所述第二工作范围为步长递减继续确定各个点的第三坐标。
[0024]
在本技术的一实施例中,根据所述平面上所有的点对应的所述最大值和所述最小值确定最大有效工作空间的步骤包括:从所述平面上所有的点对应的所述最大值中取最小者作为所述极限最大值,从所述平面上所有的点对应的所述最小值中取最大者作为所述极限最小值;根据所述极限最大值和所述极限最小值确定最大有效工作空间。
[0025]
在本技术的一实施例中,根据所述极限最大值和所述极限最小值得到最大有效工作空间的步骤包括:生成所述第二坐标轴和所述第三坐标轴组成的平面对应的极限最大值曲面,生成所述第二坐标轴和所述第三坐标轴组成的平面对应的极限最小值曲面,得到最大有效工作空间。
[0026]
在本技术的一实施例中,末端工具有效工作空间的规划方法还包括:判断所述最大有效工作空间是否大于需求工作空间,如果否,则调整所述机械臂结构参数并重新获取所述最大有效工作空间。
[0027]
为了解决上述技术问题,本技术提供一种末端工具有效工作空间的规划装置,包括:存储器,用于存储可由处理器执行的指令;处理器,用于执行所述指令以实现前文所述的末端工具有效工作空间的规划方法。
[0028]
为了解决上述技术问题,本技术提供一种存储有计算机程序代码的计算机可读介质,所述计算机程序代码在由处理器执行时实现前文所述的末端工具有效工作空间的规划方法。
[0029]
本发明的末端工具有效工作空间的规划方法通过设置第一坐标轴的极限值为有效工作空间的设计变量,以末端工具的极限朝向的空间向量集合为约束条件规划最大有效工作空间,实现了当末端工具与机械臂末端不共轴的情况下最大有效工作空间的规划,应用场景广泛;相比于常规的蒙特卡洛法在工作空间随机取点,本发明在给定末端工具朝向需求以后,平面上的点仅需取基坐标系中的其中两个坐标轴的坐标即可,大幅减少计算量。
附图说明
[0030]
为让本技术的上述目的、特征和优点能更明显易懂,以下结合附图对本技术的具体实施方式作详细说明,其中:
[0031]
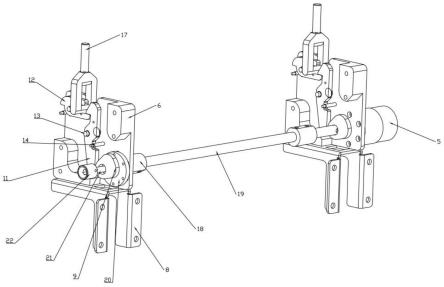
图1是本发明一实施例的机械臂和末端工具的结构示意图;
[0032]
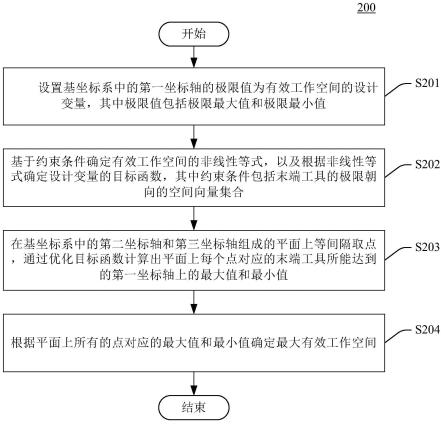
图2是本发明一实施例的末端工具有效工作空间的规划方法的流程示意图;
[0033]
图3是本技术一实施例的末端工具有效工作空间的规划装置的系统框图。
具体实施方式
[0034]
为让本技术的上述目的、特征和优点能更明显易懂,以下结合附图对本技术的具体实施方式作详细说明。
[0035]
在下面的描述中阐述了很多具体细节以便于充分理解本技术,但是本技术还可以
采用其它不同于在此描述的其它方式来实施,因此本技术不受下面公开的具体实施例的限制。
[0036]
本技术中使用了流程图用来说明根据本技术的实施例的系统所执行的操作。应当理解的是,前面或下面操作不一定按照顺序来精确地执行。相反,可以按照倒序或同时处理各种步骤。同时,或将其他操作添加到这些过程中,或从这些过程移除某一步或数步操作。
[0037]
图1是本发明一实施例的机械臂和末端工具的结构示意图。图1示出了机械臂的两种不同的姿态。如图1所示,机械臂包括基座101、多个轴102、多个关节角103、腕关节104和机器臂末端105。末端工具20通过工具连杆30安装在机器臂末端105上。末端工具20包括工具中心点201。在本实施例中,末端工具20为针头。机械臂的基座101固定,以基座101的中心点为原点,以通过原点且垂直于基座101的表面的基座中心轴线为zb轴,以平行基座101的表面建立xb轴和yb轴,其中xb轴和yb轴相互垂直,得到基座坐标系b。以末端工具20的工具中心点201为原点,以通过工具中心点201且与工具轴轴线重合的直线为z
t
轴,x
t
轴和y
t
轴只需要保证与z
t
轴两两互相垂直即可,得到工具坐标系t。当工具连杆30存在固定折角与机械臂末端105相连接的时候,机械臂末端105的朝向与末端工具20朝向存在固定夹角而非共线。因此,当末端工具20不平移且绕z
t
轴旋转时,腕关节104在空间中将会沿虚线旋转一周,即对于末端工具20的同一朝向,机械臂可以有无数种姿态。故此需要一种方法在满足末端工具20的朝向要求的同时尽可能规划出最大的有效工作空间,从而决定腕关节104的位置。
[0038]
图2是本发明一实施例的末端工具有效工作空间的规划方法的流程图。如图2所示,末端工具有效工作空间的规划方法200包括以下步骤:
[0039]
步骤s201:设置基坐标系中的第一坐标轴的极限值为有效工作空间的设计变量,其中极限值包括极限最大值和极限最小值。
[0040]
在本发明的实施例中,选取基坐标系的xb轴为第一坐标轴,基坐标系的yb轴和zb轴分别为第二坐标轴和第三坐标轴。末端工具的工具中心点在基坐标系下的坐标可表示为(x,y,z)。在给定y坐标和z坐标的情况下,规划末端工具有效工作空间需要规划的是工具中心点在xb轴上的极限最大值xmax和极限最小值xmin。
[0041]
在一些实施例中,可以选择yb轴或zb轴为第一坐标轴,剩余的两个坐标轴分别为第二坐标轴和第三坐标轴。对应地,选中作为第一坐标轴的轴的极限值为有效工作空间的设计变量。
[0042]
步骤s202:基于约束条件确定有效工作空间的非线性等式,以及根据非线性等式确定设计变量的目标函数,其中约束条件包括末端工具的极限朝向的空间向量集合。
[0043]
在本发明的实施例中,基于约束条件确定的有效工作空间的非线性等式为:
[0044][0045]
其中,t
tool
为基坐标系到工具坐标系的坐标转换矩阵,f(
·
)是机械臂运动学正解函数,q是机械臂轴角向量,tool是末端工具参数,[z1,z2,z3]为末端工具的末端朝向在基坐标系下的投影,[xq,yq,zq]为根据机械臂轴角向量确定的基坐标系下的坐标。
[0046]
在本发明的实施例中,约束条件包括末端工具的极限朝向的空间向量集合。末端
工具的极限朝向的空间向量集合是指工具中心点在工作空间内所有位置上需要达到的极限朝向的空间向量集合。末端工具的极限朝向的空间向量集合可表示为:
[0047][0048]
其中,a是末端工具的极限朝向的空间向量集合,[z
11
,z
12
,z
13
]表示第1组限制的末端朝向在基坐标系下的投影,[z
n1
,z
n2
,z
n3
]表示第n组限制的端朝向在基坐标系下的投影。
[0049]
在一些实施例中,约束条件还包括机械臂的结构参数和末端工具参数。机械臂的结构参数包括械臂dh参数(denavit hartenberg parameters)和机械臂各关节角的限制范围。dh参数是一个用四个参数表达两对关节连杆之间位置角度关系的机械臂数学模型和坐标系确定系统。机械臂各关节角的限制范围可表示为:其中和分别对应了机械臂关节的最小可达角度所构成的向量和最大可达角度所构成的向量,向量中元素数量与机械臂关节数量一致。末端工具参数包括但不限于是工具坐标系z
t
轴和机械臂末端坐标系z轴之间的夹角以及工具中心点相对机械臂末端的位置。
[0050]
在步骤s202中,针对非线性等式,在给定y坐标和z坐标的情况下,获取最大x值和最小x值,可转化为求解以下目标函数:
[0051][0052][0053]
其中,min(x)为第一坐标轴的最小值,max(x)为第一坐标轴的最大值,f(
·
)是机械臂运动学正解函数的子函数,f(
·
)还可以表示为x(q),其描述了x与q之间的关系。qa是对应第一坐标轴的最小值的最优机械臂轴角向量,qb是对应第一坐标轴的最大值的最优机械臂轴角向量。
[0054]
在本发明的实施例中,以六轴机械臂为例,使用的dh参数如表1所示:
[0055]
表1
[0056][0057]
随后根据六轴角度以及工具坐标系z
t
轴和机械臂末端坐标系z轴之间的夹角theta以及工具中心点相对机械臂末端的位置[dx,dy,dz],可以得到函数x(q)的计算公式:
[0058]
x(q)=cos(q1)/10 (3*cos(q1)*cos(q2))/25 conj(dx)*(sin(q6)*(cos(q4)*sin(q1) sin(q4)*(cos(q1)*sin(q2)*sin(q3 pi/2)-cos(q1)*cos(q2)*cos(q3 pi/2))) cos(q6)*(cos(q5)*(sin(q1)*sin(q4)-cos(q4)*(cos(q1)*sin(q2)*sin(q3 pi/2)-cos
(q1)*cos(q2)*cos(q3 pi/2)))-sin(q5)*(cos(q1)*cos(q2)*sin(q3 pi/2) cos(q1)*cos(q3 pi/2)*sin(q2)))) (sin(q5)*(sin(q1)*sin(q4)-cos(q4)*(cos(q1)*sin(q2)*sin(q3 pi/2)-cos(q1)*cos(q2)*cos(q3 pi/2))))/10 conj(dz)*(sin(q5)*(sin(q1)*sin(q4)-cos(q4)*(cos(q1)*sin(q2)*sin(q3 pi/2)-cos(q1)*cos(q2)*cos(q3 pi/2))) cos(q5)*(cos(q1)*cos(q2)*sin(q3 pi/2) cos(q1)*cos(q3 pi/2)*sin(q2))) (cos(q5)*(cos(q1)*cos(q2)*sin(q3 pi/2) cos(q1)*cos(q3 pi/2)*sin(q2)))/10 (4*cos(q1)*cos(q2)*sin(q3 pi/2))/25 (4*cos(q1)*cos(q3 pi/2)*sin(q2))/25。
[0059]
步骤s203:在基坐标系中的第二坐标轴和第三坐标轴组成的平面上等间隔取点,通过优化目标函数计算出平面上每个点对应的末端工具所能达到的第一坐标轴上的最大值和最小值。
[0060]
在基坐标系中的第二坐标轴和第三坐标轴组成的平面上等间隔取点,每个点包括y坐标和z坐标。对于ybzb平面上的每个点都需要分别对min(x(qa))和min(1/x(qb))这两个函数进行优化求解。
[0061]
在一些实施例中,通过优化目标函数计算出平面上每个点对应的末端工具所能达到的第一坐标轴上的最大值和最小值的步骤包括:
[0062]
以下列等式约束与不等式约束为所述目标函数的kkt条件(karush-kuhn-tucker conditions,kkt条件),通过顺序二次规划(sequential quadratic programming,sqp)优化所述目标函数得到每个点对应的一组最优机械臂轴角向量qa和qb;
[0063][0064]qmin
<qa<q
max
[0065]qmin
<qb<q
max
[0066]
其中,[z1,z2,z3]为末端工具的末端朝向在基坐标系下的投影,[z
n1
,z
n2
,z
n3
]为第n组限制的末端朝向在基坐标系下的投影,yq和zq为根据机械臂轴角向量确定的第二坐标轴上的坐标和第三坐标轴上的坐标,y和z为平面上的点在第二坐标轴上的坐标和在第三坐标轴上的坐标,q
min
为机械臂关节的最小可达角度所构成的向量,q
max
为机械臂关节的最大可达角度所构成的向量,qa是其中一个最优机械臂轴角向量,qb是另一个最优机械臂轴角向量。
[0067]
取最优机械臂轴角向量qa对应的x(qa)的值为该点对应的第一坐标轴的最小值,取最优机械臂轴角向量qb对应的1/x(qb)的值为该点对应的第一坐标轴的最大值。由于末端工具的极限朝向的空间向量集合a有n组限制的末端朝向,根据机械臂到工件末端的坐标转换矩阵可知,当末端工具的极限朝向的空间向量集合有n组限制的末端朝向时,需要将末端工具的极限朝向的空间向量集合a中每一组限制的末端朝向(即矩阵a中的每一行向量)代入t
tool
的z1,z2,z3,得到n组xmax与xmin,可知,每个点对应n组第一
坐标轴上的最大值和最小值。
[0068]
在一些实施例中,在基坐标系中的第二坐标轴和第三坐标轴组成的平面上等间隔取点的步骤包括:
[0069]
首先,在第二坐标轴上从原点开始以第一步长递增确定各个点的第二坐标。以yb轴和zb轴分别为第二坐标轴和第三坐标轴,第一步长为0.01为例,各个点的y坐标依次为0,0.01,0.02,...。接着在第三坐标轴上从原点开始以第二步长递增确定各个点的第三坐标,以第二步长为0.1为例,各个点的z坐标依次为0,0.1,0.2,...。直到由第二坐标和第三坐标确定的点对应的第一坐标轴的最大值和最小值的差值小于第一阈值,即通过优化目标函数计算出由y坐标和z坐标确定的点对应的x坐标的最小值xmin和x坐标的最大值xmax。如果xmax-xmin的差值小于第一阈值,则在第三坐标轴上从原点开始以第二步长递减继续确定各个点的第三坐标,即各个点的z坐标依次为0,-0.1,-0.2,...。
[0070]
在一些实施例中,末端工具有效工作空间的规划方法还包括:根据工况需求确定末端工具在第二坐标轴所需要的第一工作范围和末端工具在第三坐标轴所需要的第二工作范围,根据第一工作范围和第二工作范围在基坐标系中的第二坐标轴和第三坐标轴组成的平面上等间隔取点。例如要求针头在第二坐标轴上的工作范围为0.2m(单位为米),在第三坐标轴上的工作范围为0.1m。
[0071]
在一些实施例中,根据第一工作范围和第二工作范围在基坐标系中的第二坐标轴和第三坐标轴组成的平面上等间隔取点的步骤包括:
[0072]
在第二坐标轴上从原点开始到二分之一的第一工作范围内以第一步长递增确定各个点的第二坐标,其中有效工作空间在第二坐标轴上关于原点对称;在第三坐标轴上从原点开始以第二工作范围为步长递增确定各个点的第三坐标,直到由第二坐标和第三坐标确定的点对应的第一坐标轴的最大值和最小值的差值小于第一阈值,则在第三坐标轴上从原点开始以第二工作范围为步长递减继续确定各个点的第三坐标。继续以yb轴为第二坐标轴,zb轴为第三坐标轴为例,在基坐标系下,末端工具的有效工作空间因机械结构的对称性在yb轴上关于原点对称,因此只需取第一工作范围的一半进行计算,即在本实施例中y坐标的工作范围应当满足0~0.1m。以第一步长为0.01为例,各个点的y坐标依次为0,0.01,0.02,
…
,0.1。在本实施例中,z坐标的工作范围应不小于第二工作范围(即0.1m),同时由于有效工作空间在zb轴方向上可以进行平移,所以需要在zb轴上寻找一段连续的长度为0.1m的区间,且在该区间内沿xb轴方向的活动范围大于其他区间。因此需要进行大范围的搜索和计算。首先,各个点的z坐标依次为0,0.1,0.2,
…
,0.5,当y坐标和z坐标确定的点对应的x坐标的最小值xmin和x坐标的最大值xmax的差值小于第一阈值,则继续取各个点的z坐标依次为0,-0.1,-0.2,
…
,-0.5。
[0073]
在一些实施例中,可以结合机械臂的结构特征,当末端工具在zb轴的负向方向的活动范围更广时,可以直接选取各个点的第三坐标依次为0,-0.1,-0.2,
…
,-0.5。
[0074]
步骤s204:根据平面上所有的点对应的第一坐标轴上的最大值和第一坐标轴上的最小值确定最大有效工作空间。在本实施例中,从平面上所有的点对应的各第一坐标轴上的最大值中取最小者作为极限最大值,从平面上所有的点对应的各第一坐标轴上的最小值中取最大者作为极限最小值;根据极限最大值和极限最小值确定最大有效工作空间。根据步骤s203可知,平面上每个点对应n组第一坐标轴上的最大值和最小值。平面上所有的点对
应m*n个x坐标的最大值xmax,其中m为平面上点的数量。选取m*n个xmax中的最小者作为最终的极限最大值;同理,平面上所有的点对应m*n个x坐标的最小值xmin,选取m*n个xmin中的最大者作为最终的极限最小值。
[0075]
在一些实施例中,根据极限最大值和极限最小值得到最大有效工作空间的步骤包括:生成第二坐标轴和第三坐标轴组成的平面对应的极限最大值曲面,生成第二坐标轴和第三坐标轴组成的平面对应的极限最小值曲面,得到最大有效工作空间。
[0076]
在一些实施例中,末端工具有效工作空间的规划方法还包括判断最大有效工作空间是否大于需求工作空间,如果否,则调整机械臂结构参数并重新获取最大有效工作空间。可以使用遗传算法调整机械臂结构参数,将规划得到的最大有效工作空间体积作为得分函数,机械臂可修改的dh参数作为个体参数,进行迭代优化,获取最大有效工作空间所对应的机械臂结构参数。
[0077]
本发明的末端工具有效工作空间的规划方法通过设置第一坐标轴的极限值为有效工作空间的设计变量,以末端工具的极限朝向的空间向量集合为约束条件规划最大有效工作空间,实现了当末端工具与机械臂末端不共轴的情况下最大有效工作空间的规划,应用场景广泛;相比于常规的蒙特卡洛法在工作空间随机取点,本发明在给定末端工具朝向需求以后,平面上的点仅需取基坐标系中的其中两个坐标轴的坐标即可,大幅减少计算量。
[0078]
本技术还包括一种末端工具有效工作空间的规划装置,包括存储器和处理器。其中,该存储器用于存储可由处理器执行的指令;处理器用于执行该指令以实现前文的末端工具有效工作空间的规划方法。本技术的末端工具有效工作空间的规划装置的一实施例可参考图3,图3是本技术一实施例的末端工具有效工作空间的规划装置的系统框图。参考图3所示,该末端工具有效工作空间的规划装置300(以下简称规划装置300)可包括内部通信总线301、处理器302、只读存储器(rom)303、随机存取存储器(ram)304以及通信端口305。当应用在个人计算机上时,该规划装置300还可以包括硬盘306。内部通信总线301可以实现该规划装置300组件间的数据通信。处理器302可以进行判断和发出提示。在一些实施例中,处理器302可以由一个或多个处理器组成。通信端口305可以实现该规划装置300与外部的数据通信。在一些实施例中,该规划装置300可以通过通信端口305从网络发送和接收信息及数据。该规划装置300还可以包括不同形式的程序储存单元以及数据储存单元,例如硬盘303,只读存储器(rom)303和随机存取存储器(ram)304,能够存储计算机处理和/或通信使用的各种数据文件,以及处理器302所执行的可能的程序指令。处理器执行这些指令以实现方法的主要部分。处理器处理的结果通过通信端口传给用户设备,在用户界面上显示。
[0079]
上述的文本分类方法可以实施为计算机程序,保存在硬盘306中,并可加载到处理器302中执行,以实施本技术的末端工具有效工作空间的规划方法。
[0080]
本技术还包括一种存储有计算机程序代码的计算机可读介质,该计算机程序代码在由处理器执行时实现前文所述的末端工具有效工作空间的规划方法。
[0081]
末端工具有效工作空间的规划方法实施为计算机程序时,也可以存储在计算机可读存储介质中作为制品。例如,计算机可读存储介质可以包括但不限于磁存储设备(例如,硬盘、软盘、磁条)、光盘(例如,压缩盘(cd)、数字多功能盘(dvd))、智能卡和闪存设备(例如,电可擦除可编程只读存储器(eprom)、卡、棒、键驱动)。此外,本文描述的各种存储介质能代表用于存储信息的一个或多个设备和/或其它机器可读介质。术语“机器可读介质”可
以包括但不限于能存储、包含和/或承载代码和/或指令和/或数据的无线信道和各种其它介质(和/或存储介质)。
[0082]
应该理解,上文所描述的实施例仅是示意。本文描述的实施例可在硬件、软件、固件、中间件、微码或者其任意组合中实现。对于硬件实现,处理器可以在一个或者多个特定用途集成电路(asic)、数字信号处理器(dsp)、数字信号处理设备(dspd)、可编程逻辑器件(pld)、现场可编程门阵列(fpga)、处理器、控制器、微控制器、微处理器和/或设计为执行本文所述功能的其它电子单元或者其结合内实现。
[0083]
本技术的一些方面可以完全由硬件执行、可以完全由软件(包括固件、常驻软件、微码等)执行、也可以由硬件和软件组合执行。以上硬件或软件均可被称为“数据块”、“模块”、“引擎”、“单元”、“组件”或“系统”。处理器可以是一个或多个专用集成电路(asic)、数字信号处理器(dsp)、数字信号处理器件(dapd)、可编程逻辑器件(pld)、现场可编程门阵列(fpga)、处理器、控制器、微控制器、微处理器或者其组合。此外,本技术的各方面可能表现为位于一个或多个计算机可读介质中的计算机产品,该产品包括计算机可读程序编码。例如,计算机可读介质可包括,但不限于,磁性存储设备(例如,硬盘、软盘、磁带
……
)、光盘(例如,压缩盘cd、数字多功能盘dvd
……
)、智能卡以及闪存设备(例如,卡、棒、键驱动器
……
)。
[0084]
计算机可读介质可能包含一个内含有计算机程序编码的传播数据信号,例如在基带上或作为载波的一部分。该传播信号可能有多种表现形式,包括电磁形式、光形式等等、或合适的组合形式。计算机可读介质可以是除计算机可读存储介质之外的任何计算机可读介质,该介质可以通过连接至一个指令执行系统、装置或设备以实现通讯、传播或传输供使用的程序。位于计算机可读介质上的程序编码可以通过任何合适的介质进行传播,包括无线电、电缆、光纤电缆、射频信号、或类似介质、或任何上述介质的组合。
[0085]
如本技术和权利要求书中所示,除非上下文明确提示例外情形,“一”、“一个”、“一种”和/或“该”等词并非特指单数,也可包括复数。一般说来,术语“包括”与“包含”仅提示包括已明确标识的步骤和元素,而这些步骤和元素不构成一个排它性的罗列,方法或者设备也可能包含其他的步骤或元素。
[0086]
除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本技术的范围。同时,应当明白,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
[0087]
此外,尽管本技术中所使用的术语是从公知公用的术语中选择的,但是本技术说明书中所提及的一些术语可能是申请人按他或她的判断来选择的,其详细含义在本文的描述的相关部分中说明。此外,要求不仅仅通过所使用的实际术语,而是还要通过每个术语所蕴含的意义来理解本技术。
[0088]
同时,本技术使用了特定词语来描述本技术的实施例。如“一个实施例”、“一实施
例”、和/或“一些实施例”意指与本技术至少一个实施例相关的某一特征、结构或特点。因此,应强调并注意的是,本说明书中在不同位置两次或多次提及的“一实施例”或“一个实施例”或“一替代性实施例”并不一定是指同一实施例。此外,本技术的一个或多个实施例中的某些特征、结构或特点可以进行适当的组合。
[0089]
上文已对基本概念做了描述,显然,对于本领域技术人员来说,上述申请披露仅仅作为示例,而并不构成对本技术的限定。虽然此处并没有明确说明,本领域技术人员可能会对本技术进行各种修改、改进和修正。该类修改、改进和修正在本技术中被建议,所以该类修改、改进、修正仍属于本技术示范实施例的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。