1.本发明涉及行走机构技术领域,特别是关于一种模块化可附加的腿足式行走装置。
背景技术:
2.腿足式行走装置具有良好的道路通过性和崎岖地形适应性,常应用于野外勘测、抢险救灾和山地运输等重要领域。具有单一腿足式行走装置的运载平台虽然能够有效应对复杂路况,但在铺装良好路面上的行进速度相对轮式和履带式车辆还是较慢;具有“腿足式—轮式”或“腿足式—履带式”的多种复合行走装置的运载平台能够应对多种路况,但平台系统设计冗余度较大,结构复杂,行走方式切换要求较高且腿足构型不易调整。为了降低运载平台系统的设计难度,提高运载平台面对多种复杂路况的适应能力,设计一种整体结构可拓展、腿足构型可变换的模块化可附加的腿足行走装置成为了理想之选。
技术实现要素:
3.为此,本发明提供一种模块化可附加的腿足式行走装置及控制方法,以解决上述背景技术中提出的问题,行走装置包括左行走模块、右行走模块、横向拓展模块、纵向拓展模块等模块,并通过阶梯连接销将各个模块连接,构成一种结构可拓展、腿足构型可变换的模块化可附加的腿足行走装置,运载平台承载于其上从而实现对多种复杂路况的道路通过性和适应性。
4.本发明所采用的技术方案如下:一种模块化可附加的腿足式行走装置,其特征在于:
5.包括行走模块和拓展模块;
6.所述行走模块左、右对称布置,单侧数量至少为两个,在左、右对称的两行走模块之间通过所述拓展模块连接,在同侧的各个行走模块之间也通过所述拓展模块连接;
7.所述行走模块包括腿足单元和支撑单元;
8.所述腿足单元包括基节、大腿杆、小腿杆和足;所述基节一端和支撑单元驱动连接,另一端和大腿杆轴铰接,所述大腿杆另一端和小腿杆轴铰接,所述小腿杆另一端和足球铰接;
9.所述支撑单元包括支撑架和电机、变速器、减速器;所述电机驱动连接变速器和减速器,所述减速器的输出轴连接所述基节;所述支撑架上设置运载平台。
10.进一步地:
11.所述拓展模块,两端为拓展孔和拓展头的公母端,所述拓展模块之间,以及拓展模块与行走模块之间,通过拓展孔和拓展头配合连接。
12.进一步地:
13.所述拓展模块之间,通过连接模块连接,所述连接模块上设置多组可调位置的连接销孔;所述拓展模块与行走模块之间通过拓展孔和拓展头配合连接。
14.进一步地:
15.所述拓展模块上设置多组拓展销孔,与行走模块之间可调位置地连接。
16.进一步地:
17.所述电机驱动连接在变速器输入轴上,所述变速器设置有变速器输入轴、变速器中间轴一、变速器中间轴二和变速器输出轴,变速器输入轴上设置有齿轮一,变速器中间轴一设置有齿轮二、齿轮三和齿轮七,变速器中间轴二上设置有齿轮八,变速器输出轴上设置有齿轮四、齿轮五和齿轮六,同时变速器输出轴上设置有离合器一和离合器二,
18.所述齿轮一和轴一起转动,
19.所述齿轮二、齿轮三和齿轮七和轴一起转动,
20.所述齿轮八不和轴一起转动,
21.所述齿轮四、齿轮五和轴一起转动,
22.所述齿轮六和轴一起转动,
23.所述齿轮一和齿轮二啮合,
24.所述齿轮三和齿轮四啮合,
25.所述齿轮七和齿轮八啮合,
26.所述齿轮八和齿轮五啮合;
27.所述减速器设置有减速器输入轴、减速器中间轴、减速器输出轴,减速器输入轴上设置有齿轮九,减速器中间轴上设置有齿轮十,减速器输出轴上设置有齿轮十一,
28.所述齿轮九和齿轮十啮合,所述齿轮十同时和齿轮十一啮合。
29.进一步地:
30.所述支撑架上设置车轮定位凹槽和t型滑槽,所述t型滑槽和车轮定位凹槽相对,所述车轮定位凹槽中定位运载平台的车轮,所述t型滑槽中滑动安装车轮固定板,所述车轮固定板滑动到t型滑槽端部时与运载平台的车轮顶紧。
31.进一步地:
32.所述支撑架上设置丝杆、丝杆内挡块、丝杆外挡块、扳手;
33.所述车轮固定板上固定有t型杆,t型杆配合安装在所述t型滑槽内;
34.所述t型杆下侧开有螺纹孔,所述螺纹孔与丝杆配合安装;
35.所述丝杆两端固定有丝杆内挡块和丝杆外挡块,丝杆外端连接扳手。
36.进一步地:
37.所述支撑架上设置有车轮绑带固定孔和辅助坡道。
38.进一步地:
39.所述腿足式行走装置,为4足、6足或多足式行走装置。
40.本发明还提供一种模块化可附加的腿足式行走装置的控制方法,其特征在于:
41.控制所述变速器输出轴上的离合器一和齿轮四接合,离合器二和齿轮六断开,使所述电机通过变速器和减速器驱动基节正向转动;
42.控制所述变速器输出轴上的离合器一和齿轮五接合,离合器二和齿轮六断开,使所述电机通过变速器和减速器驱动基节反向转动;
43.控制所述变速器输出轴上的离合器二和齿轮六接合,离合器一和齿轮四、齿轮五断开,使所述变速器锁止,基节锁止;
44.控制所述变速器输出轴上的离合器二和齿轮六断开,离合器一和齿轮四、齿轮五断开,使所述变速器处于空挡状态,基节自由转动;
45.通过上述控制,
46.1)当腿足单元在大于0
°
至小于180
°
之间摆动时,所述腿足式行走装置模仿昆虫行走方式,通过调整腿足单元前后摆动的幅度改变仿昆虫行走的步幅;
47.2)当腿足单元摆至0
°
或180
°
,所述基节位置锁止时,所述腿足式行走装置模仿哺乳动物行走方式,且
48.大腿杆和小腿杆之间关节的朝向与运载平台车头方向一致时,为膝式腿足;
49.大腿杆和小腿杆之间关节的朝向与运载平台车头方向相反时,为肘式腿足。
50.与现有技术相比,本发明显著的有益效果体现在:
51.(1)本发明一种模块化可附加的腿足式行走装置,与现有技术相比,以附加的方式承载运载平台,使其具有腿足行走模式,不占据运载平台内部空间,降低了运载平台系统设计的冗余度。
52.(2)本发明一种模块化可附加的腿足式行走装置,结构采用模块化设计,行走模块、扩展模块、连接模块都是模块化设计,可以调整横向宽度和纵向长度,以适用不同轮廓尺寸的运载平台,并且可以调整腿足单元的数量,以适应不同吨位等级的运载平台,装置设计灵活。
53.(3)本发明一种模块化可附加的腿足式行走装置,结构简单,布置方便灵活,行走装置的各模块拆卸后可随车运输,方便易行。
54.(4)本发明一种模块化可附加的腿足式行走装置的控制方法,具有多种行走模式,既能实现模仿昆虫方式行走,也能实现模仿哺乳动物方式行走,并能实现膝式腿足和肘式腿足的切换。
附图说明
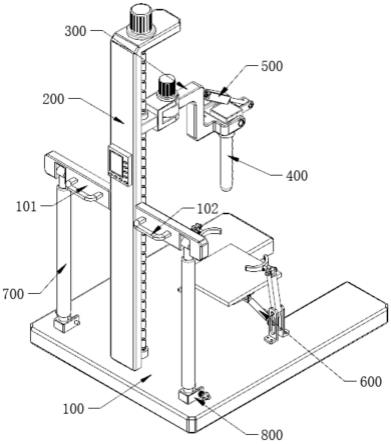
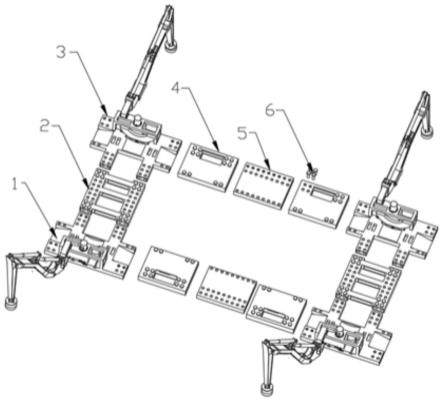
55.图1为根据本发明实施例示出的总体结构示意图;
56.图2为根据本发明实施例示出的左行走模块结构示意图;
57.图3为根据本发明实施例示出的腿足单元结构示意图;
58.图4-1为根据本发明实施例示出的支撑单元结构示意图;
59.图4-2为图4-1中的a-a剖视图;
60.图5为根据本发明实施例示出的支撑架结构示意图;
61.图6为根据本发明实施例示出的变速器和减速器原理简图;
62.图7为车轮固定板结构示意图;
63.图8为根据本发明实施例示出的横向拓展模块结构示意图;
64.图9为根据本发明实施例示出的纵向拓展模块结构示意图;
65.图10为根据本发明实施例示出的连接模块结构示意图;
66.图11为根据本发明实施例示出的六足行走装置的示意图;
67.图12为根据本发明实施例示出的腿足行走装置初始姿态和站立姿态示意图;
68.图13为根据本发明实施例示出的腿足行走装置多种行走模式示意图。
69.图中:
70.1-左行走模块;2-横向拓展模块;3-右行走模块;4-纵向拓展模块;5-连接模块;6-阶梯连接销。
71.1.1-腿足单元;1.2-支撑单元。
72.1.1.1-基节;1.1.2-大腿杆;1.1.3-小腿杆;1.1.4-大腿驱动缸;1.1.5-小腿驱动缸;1.1.6-足。
73.1.2.1-支撑架;1.2.2-电机;1.2.3-变速器;1.2.4-减速器;1.2.5-车轮固定板;1.2.6-丝杆;1.2.7-丝杆内挡块;1.2.8-丝杆外挡块;1.2.9-扳手。
74.1.2.5.1-固定板;1.2.5.2-t型杆;1.2.5.3-螺纹孔。
75.1.2.1.1-电机固定孔;1.2.1.2-变速器固定孔;1.2.1.3-减速器固定孔;1.2.1.4-基节连接孔;1.2.1.5-车轮绑带固定孔;1.2.1.6-支撑架销孔;1.2.1.7-t型滑槽;
76.1.2.1.8-车轮定位凹槽;1.2.1.9-横向拓展头;1.2.1.10-纵向拓展头;1.2.1.11-辅助坡道。
77.2.1-横向拓展孔;2.2-横向拓展销孔;4.1-纵向拓展孔;4.2-纵向拓展销孔;5.1-连接销孔。
78.ⅰ‑
变速器输入轴;
ⅱ‑
变速器中间轴一;
ⅲ‑
变速器中间轴二;
ⅳ‑
变速器输出轴。
79.ⅴ‑
减速器输入轴;
ⅵ‑
减速器中间轴;
ⅶ‑
减速器输出轴。
80.g1-齿轮一;g2-齿轮二;g3-齿轮三;g4-齿轮四;g5-齿轮五;g6-齿轮六;g7-齿轮七;g8-齿轮八;g9-齿轮九;g10-齿轮十;g11-齿轮十一。
81.c1-离合器一;c2-离合器二。
具体实施方式
82.下面结合附图和实施例对本发明进行详细的描述。
83.如图1所示,本发明提供一种模块化可附加的腿足式行走装置,包括有左行走模块1、横向拓展模块2、右行走模块3、纵向拓展模块4、连接模块5和阶梯连接销6。行走装置以纵向中心线为中心左右对称,左行走模块1和右行走模块3分置于纵向中心线左右,左行走模块1与右行走模块3横向之间通过横向拓展模块2连接,同侧的左行走模块1与左行走模块1纵向之间,以及同侧的右行走模块3与右行走模块3纵向之间,分别通过纵向拓展模块4连接,横向拓展模块2、纵向拓展模块4都可设置多块,之间通过连接模块5连接,以上各模块都是通过阶梯连接销6连接,从而构成模块化可附加的腿足行走装置,实现用于多种路况的运载行走。
84.所述腿足行走装置整体结构左右对称,左侧结构和右侧结构对称设置,本案例以左侧结构为主进行描述。
85.如图2所示,左行走模块1包括腿足单元1.1和支撑单元1.2。
86.如图3所示,腿足单元1.1包括:基节1.1.1、大腿杆1.1.2、小腿杆1.1.3、大腿驱动缸1.1.4、小腿驱动缸1.1.5和足1.1.6。
87.所述基节1.1.1一端和支撑单元1.2连接,另一端和大腿杆1.1.2一端轴铰接,所述大腿杆1.1.2另一端和小腿杆1.1.3轴铰接,所述小腿杆1.1.3另一端通过球铰和足1.1.6连接;所述大腿驱动缸1.1.4一端和基节1.1.1轴铰接,另一端在大腿杆1.1.2近中间位置处与大腿杆1.1.2轴铰接,所述小腿驱动缸1.1.5一端在大腿杆1.1.2近中间位置处与大腿杆
1.1.2轴铰接,另一端和小腿杆1.1.3远离足的一端轴铰接。大腿驱动缸1.1.4和小腿驱动缸1.1.5都是电动缸,大腿驱动缸1.1.4的伸缩带动大腿杆1.1.2摆动,小腿驱动缸1.1.5的伸缩带动小腿杆1.1.3摆动。
88.如图4-1,4-2所示,支撑单元1.2包括:支撑架1.2.1和在支撑架1.2.1上的相关装置,相关装置包括电机1.2.2、变速器1.2.3、减速器1.2.4、车轮固定板1.2.5、丝杆1.2.6、丝杆内挡块1.2.7、丝杆外挡块1.2.8、扳手1.2.9。
89.如图5所示,支撑架1.2.1上设置有相关装置的固定孔、定位槽、拓展头及辅助坡道。
90.所述固定孔包括电机固定孔1.2.1.1、变速器固定孔1.2.1.2、减速器固定孔1.2.1.3、基节连接孔1.2.1.4、车轮绑带固定孔1.2.1.5、支撑架销孔1.2.1.6。
91.电机固定孔1.2.1.1用于固定电机1.2.2。
92.变速器固定孔1.2.1.2用于固定变速器1.2.3。
93.减速器固定孔1.2.1.3用于固定减速器1.2.4。
94.基节连接孔1.2.1.4用于将减速器1.2.4的输出轴与基节1.1.1连接。
95.车轮绑带固定孔1.2.1.5用于安装绑带固定车轮。
96.支撑架销孔1.2.1.6可设置多组,用于与横向拓展模块2、纵向拓展模块4连接,调整行走装置横向和纵向的长度。
97.所述定位槽包括t型滑槽1.2.1.7、车轮定位凹槽1.2.1.8。
98.t型滑槽1.2.1.7并排包括三个,其中中间的t型滑槽因为与车轮定位凹槽1.2.1.8相对,所以为通槽,两侧的t型滑槽为内端封闭的t型槽;t型滑槽1.2.1.7用于安装车轮固定板1.2.5。
99.车轮定位凹槽1.2.1.8用于辅助定位运载平台的车轮,防止运载平台前后移动。
100.所述拓展头包括横向拓展头1.2.1.9、纵向拓展头1.2.1.10。
101.横向拓展头1.2.1.9通过阶梯连接销6与横向拓展模块2的横向拓展孔2.1连接,实现行走模块之间的横向连接。
102.纵向拓展头1.2.1.10通过阶梯连接销6与纵向拓展模块4的纵向拓展孔4.1连接,实现行走模块之间的纵向连接。
103.所述辅助坡道1.2.1.11用于辅助运载平台行驶驶上腿足式行走装置。
104.如图6所示,电机1.2.2驱动连接变速器1.2.3,变速器设置有变速器输入轴ⅰ、变速器中间轴一ⅱ、变速器中间轴二ⅲ、变速器输出轴ⅳ。变速器输入轴ⅰ上设置有齿轮一g1,变速器中间轴一ⅱ上设置有齿轮二g2、齿轮三g3和齿轮七g7,变速器中间轴二ⅲ上设置有齿轮八g8,变速器输出轴ⅳ上设置有齿轮四g4、齿轮五g5和齿轮六g6,同时变速器输出轴ⅳ上设置有离合器一c1和离合器二c2。
105.所述电机1.2.2输出轴和变速器输入轴ⅰ相连,所述变速器输入轴ⅰ上固定的齿轮一g1和轴一起转动。变速器中间轴一ⅱ上固定的齿轮二g2、齿轮三g3和齿轮七g7和轴一起转动。变速器中间轴二ⅲ上套有齿轮八g8,齿轮八g8不随变速器中间轴二ⅲ转动。变速器输出轴ⅳ上的齿轮四g4、齿轮五g5和齿轮六g6,其中齿轮六g6为固定齿轮,不随变速器输出轴ⅳ转动。变速器输入轴ⅰ上的齿轮一g1和变速器中间轴一ⅱ上齿轮二g2啮合,变速器中间轴一ⅱ上的齿轮三g3和变速器输出轴ⅳ上的齿轮四g4啮合,变速器中间轴一ⅱ上的齿轮七g7
和变速器中间轴二ⅲ上的齿轮八g8啮合,齿轮八g8和变速器输出轴ⅳ上的齿轮五g5啮合。
106.减速器1.2.4设置有减速器输入轴
ⅴ
、减速器中间轴ⅵ、减速器输出轴ⅶ,减速器输入轴
ⅴ
上设置有齿轮九g9,减速器中间轴ⅵ上设置有齿轮十g10,减速器输出轴ⅶ上设置有齿轮十一g11。变速器输出轴ⅳ和减速器输入轴
ⅴ
相连,减速器输入轴
ⅴ
上的齿轮九g9和减速器中间轴ⅵ上的齿轮十g10啮合,减速器中间轴ⅵ上的齿轮十g10和减速器输出轴ⅶ上的齿轮十一g11啮合,减速器输出轴ⅶ和基节1.1.1相连。
107.当变速器输出轴ⅳ上离合器一c1和齿轮四g4接合,离合器二c2和齿轮六g6断开时,电机1.2.2通过变速器1.2.3和减速器1.2.4驱动基节1.1.1正向转动。正向转动的动力传递路线是:电机1.2.2
→
变速器输入轴
ⅰ→
变速器输入轴ⅰ上的齿轮一g1
→
变速器中间轴一ⅱ上的齿轮二g2
→
变速器中间轴一
ⅱ→
变速器中间轴一ⅱ上的齿轮三g3
→
变速器输出轴ⅳ上的齿轮四g4
→
变速器输出轴
ⅳ→
减速器1.2.4
→
基节1.1.1。
108.当变速器输出轴ⅳ上离合器一c1和齿轮五g5接合,离合器二c2和齿轮六g6断开时,电机1.2.2通过变速器1.2.3和减速器1.2.4驱动基节1.1.1反向转动。反向转动的动力传递路线:电机1.2.2
→
变速器输入轴
ⅰ→
变速器输入轴ⅰ上的齿轮一g1
→
变速器中间轴一ⅱ上的齿轮二g2
→
变速器中间轴一
ⅱ→
变速器中间轴一ⅱ上齿轮七g7
→
变速器中间轴二ⅲ上的齿轮八g8
→
变速器中间轴二
ⅲ→
变速器输出轴ⅳ上的齿轮五g5
→
减速器1.2.4
→
基节1.1.1。
109.通过变速器1.2.3将电机1.2.2的运动转变为基节1.1.1的正向转动或反向转动,基节1.1.1沿减速器输出轴ⅶ的轴向转动带动腿足单元1.1在0
°
~180
°
范围内前后摆动,腿足单元1.1的前后摆动类似昆虫行走时腿的前后摆动,从而实现行走装置的行走运动。通过调整基节1.1.1正向转动和反向转动的角度能调整仿昆虫行走时的步幅,同时也用来调整仿生物行走模式的转变。
110.如图7所示,所述车轮固定板1.2.5上固定有三个t型杆1.2.5.2,车轮固定板1.2.5上的三个t型杆1.2.5.2安装在支撑架1.2.1上的三个t型滑槽1.2.1.7内,车轮固定板1.2.5上中间的t型杆下侧开有螺纹孔1.2.5.3,螺纹孔1.2.5.3与丝杆1.2.6配合用于调整车轮固定板1.2.5的位置。
111.所述丝杆1.2.6为阶梯轴,中间部分带有螺纹,丝杆1.2.6两端安装有丝杆内挡块1.2.7和丝杆外挡块1.2.8,丝杆1.2.6外端连接有扳手1.2.9。
112.所述丝杆内挡块1.2.7和丝杆外挡块1.2.8固定在t型滑槽1.2.1.7两侧,限制丝杆1.2.6轴向移动,通过扳手1.2.9转动丝杆1.2.6,带动装配在丝杆1.2.6上的车轮固定板1.2.5上的t型杆1.2.5.2在t型滑槽1.2.1.7内移动,从而将车轮固定板1.2.5靠紧车轮限制车轮横向移动。
113.右行走模块3结构和左行走模块1结构相同。
114.如图8所示,所述横向拓展模块2是用于将左行走模块1和右行走模块3连接。所述横向拓展模块2上设置有横向拓展孔2.1和横向拓展销孔2.2。
115.所述横向拓展模块2上的横向拓展孔2.1和左行走模块1的横向拓展头1.2.1.9配合,所述横向拓展模块2上开有多组横向拓展销孔2.2,横向拓展销孔2.2和左行走模块1上的支撑架销孔1.2.1.6对齐,通过阶梯连接销6连接,可将左行走模块1和横向拓展模块2连接。通过改变横向拓展模块2上的横向拓展销孔2.2与左行走模块1上的支撑架销孔1.2.1.6
的对齐位置,可以调整横向左行走模块1和右行走模块3之间的距离,从而调整行走装置的横向宽度。进一步地,可以将横向拓展模块2两端做成带有拓展孔和拓展头的公母端,在左行走模块1和右行走模块3之间可以采用多个这样的横向拓展模块串联,以增加行走装置的横向跨度。
116.如图9所示,所述纵向拓展模块4是用于将同侧的左行走模块和左行走模块,或者右行走模块和右行走模块连接。所述纵向拓展模块4上设置有纵向拓展孔4.1和纵向拓展销孔4.2。
117.所述纵向拓展模块4上的纵向拓展孔4.1和左行走模块1的纵向拓展头1.2.1.10配合,所述纵向拓展模块4上开有多组纵向拓展销孔4.2,纵向拓展销孔4.2和左行走模块1上的支撑架销孔1.2.1.6对齐,通过阶梯连接销6连接,可将左行走模块1和纵向拓展模块4连接。同理,可以将纵向拓展模块4两端做成带有拓展孔和拓展头的公母端,在纵向上同侧的左行走模块1和左行走模块1之间可以采用多个这样的纵向拓展模块串联,以增加行走装置的纵向长度。
118.所述横向拓展模块2、纵向拓展模块4的结构可以一样。
119.除上述多个横向拓展模块2、多个纵向拓展模块4自身采用串联方式外,如图10所示,还可以采用连接模块5连接。所述连接模块5上设置有多组连接销孔5.1,连接销孔5.1与纵向拓展模块4的纵向拓展销孔4.2对齐,通过阶梯连接销6连接,通过连接模块5将多个纵向拓展模块4串联,首端的纵向拓展模块4与一组左行走模块1连接,末端的纵向拓展模块4与另一组左行走模块1连接,从而构成行走装置的左侧结构,右侧同理。
120.同理,通过连接模块5将多个横向拓展模块2串联,首端的横向拓展模块2与装置前端的左行走模块1连接,末端的横向拓展模块2与装置前端的右行走模块3连接,从而构成行走装置的前端结构,后端结构同理。
121.如图1所示,左行走模块1和右行走模块3至少各有两个,构成4足机构。左行走模块1与右行走模块3之间通过横向拓展模块2(或加连接模块5)连接,左行走模块1与左行走模块1之间、右行走模块3与右行走模块3之间通过纵向拓展模块4(或加连接模块5)连接,构成腿足式行走装置。根据行走装置横向和纵向长度的需要,可以增加横向和纵向拓展模块和连接模块的数量,增加行走装置的纵向长度。
122.所述腿足式行走装置通过调整左右行走模块的数量,以及通过调整横向拓展模块、纵向拓展模块的数量,调整横向宽度和调整纵向长度,从而适应不同轮廓尺寸、不同吨位等级的运载平台。如图11所示,通过设置三个左行走模块1、三个右行走模块3,组成六足式行走装置。
123.腿足式行走装置的工作原理
124.如图12所示,所述腿足式行走装置在初始状态下,所有腿足单元1.1的大腿驱动缸1.1.4和小腿驱动缸1.1.5处于预先设定的初始位置,此时腿足行走装置底面接近地面,运载平台的车轮通过辅助坡道1.2.1.11行驶上腿足行走装置,使车轮停在车轮定位凹槽1.2.1.8内,通过绑带穿过车轮绑带固定孔1.2.1.5对车轮进行固定,使用扳手1.2.9转动丝杆1.2.6,使车轮固定板1.2.5靠紧车轮,运载平台的车轮固定之后,然后对腿足行走装置进行供电,使腿足行走装置调整至站立姿态。
125.当腿足单元1.1在大于0
°
至小于180
°
之间摆动时,行走装置采用仿昆虫行走方式,
通过腿足单元1.1的前后摆动实现行走装置的行走运动,通过调整腿足单元1.1前后摆动的幅度改变仿昆虫行走时的步幅。
126.当腿足单元1.1摆至0
°
或180
°
时,变速器输出轴ⅳ上离合器二c2和齿轮六g6接合,离合器一c1和齿轮四g4、齿轮五g5断开,变速器1.2.3锁止,通过减速器1.2.4将基节1.1.1位置锁止。行走装置采用仿哺乳动物行走,通过大腿驱动缸1.1.4和小腿驱动缸1.1.5的伸缩实现抬腿和迈步动作,实现腿足行走装置的行走运动。
127.如图13所示,本发明具有多种行走模式,既可以模仿昆虫方式行走,也可以模仿哺乳动物方式行走,并实现膝式腿足和肘式腿足的切换。
128.1)仿昆虫方式行走模式
129.通过变速器1.2.3和减速器1.2.4将电机1.2.2单一方向的转动转变为基节1.1.1的正向和反向摆动时,基节1.1.1的前后摆动,带动腿足单元1.1前后摆动,进而实现腿足行走装置的仿昆虫方式行走运动。
130.同时,当行走模块中的腿足单元1.1的大腿杆1.1.2和小腿杆1.1.3所在平面与车身纵向平面成一定角度,即角度在大于0
°
至小于180
°
范围内时,腿足单元1.1的大腿驱动缸1.1.4和小腿驱动缸1.1.5驱动大腿杆1.1.2和小腿杆1.1.3伸缩前后摆动实现行走装置的行走运动,并且通过调整腿足单元1.1前后摆动的幅度改变仿昆虫行走时的步幅。
131.2)仿哺乳动物方式行走模式
132.通过减速器1.2.4将基节1.1.1位置锁止,通过大腿驱动缸1.1.4和小腿驱动缸1.1.5的伸缩实现抬腿和迈步动作,进而实现腿足行走装置的仿哺乳动物方式行走运动。
133.同时,当行走模块中的腿足单元1.1的大腿杆1.1.2和小腿杆1.1.3所在平面与车身纵向与地面垂直的平面平行,即摆至0
°
或180
°
时,大腿杆1.1.2和小腿杆1.1.3之间关节的朝向与运载平台车头方向一致,此时为膝式腿足。大腿杆1.1.2和小腿杆1.1.3之间关节的朝向与运载平台车头方向相反,此时为肘式腿足。可通过基节1.1.1的转动改变大腿杆1.1.2和小腿杆1.1.3之间关节的朝向,实现膝式腿足和肘式腿足的切换。
134.图13中所示各种行走模式依次为:仿昆虫式、仿哺乳动物前膝后肘式、仿哺乳动物前肘后膝式、仿哺乳动物双膝式、仿哺乳动物双肘式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。