1.本发明涉及一种电驱动压路机,更具体地说,涉及一种电驱动压路机及其行驶控制方法和系统。
背景技术:
2.电驱动压路机便是工程机械中一款重要装备。电驱动压路机的传动系统包括依次传动连接的行走电机、变速箱和驱动桥。行走电机通常为永磁电机,在压路机进行减速、下坡或制动时可利用机器的惯性通过传动系统反拖行走电机发电,在对机器减速的同时回收能量。但在压路机的动力电池在充满电的情况下无法回收行走电机反拖制动产生的电能,因此需要在压路机上设置制动电阻,以便在动力电池满电的情况下,通过制动电阻发热来消耗行走电机反拖制动产生的能量。设置制动电阻需要额外增加成本。
3.在有些电驱动压路机上不给动力电池充满电,限制动力电池的电量在某一数值以下,以便能够回收行走电机反拖制动产生的能量。该方案限制了动力电池能力的发挥,且充电过程中需要实时防止充电电量超过限值,存在一定的局限性。
技术实现要素:
4.本发明要解决的技术问题是针对现有电驱动压路机需要配备制动电阻或者限制动力电池充电量所引起的的问题,而提供一种电驱动压路机及其行驶控制方法和系统,在不设置制动电阻的情形下解决电驱动压路机满电行驶的问题。
5.本发明为实现其目的的技术方案是这样的:提供一种电驱动压路机行驶控制方法,压路机的行走驱动系统包括传动连接在行走电机与驱动桥之间的行走电机和用于控制行走电机的电机控制器,其特征在于压路机不具有制动电阻,控制方法如下:
6.获取动力电池的储电量,在储电量大于预设数值的满电状态下执行以下控制:
7.整机控制器向电机控制器发送零值反拖扭矩限制指令和最大扭矩限制指令;
8.在行走操纵手柄离开中位时整机控制器向行车制动系统输出最大值的行车制动电流,并在行走操纵手柄离开中位后手柄摆动角度变化时随手柄摆动角度增减对应地减增行车制动电流;
9.在行走操纵手柄不在中位时根据行走操纵手柄的手柄摆动角度向电机控制器发送转速控制指令。
10.在本发明中,压路机不具有制动电阻,在满电行驶过程中通过行车制动系统与行走电机配合,解决压路机满电行驶的问题。
11.上述电驱动压路机行驶控制方法中,在满电状态下,整机控制器向电机控制器发送的最大扭矩限制指令所对应的最大扭矩值与手柄摆动角度正相关。
12.上述电驱动压路机行驶控制方法中,在满电状态下,当行走电机当前转速大于与当前手柄摆动角度对应的转速时以预定斜率在当前行车制动电流的基础上增加行车制动电流,直至行走电机转速等于与当前手柄摆动角度对应的转速;当行走电机当前转速小于
与当前手柄摆动角度对应的转速时以预定斜率在当前行车制动电流的基础上减小行车制动电流,直至行走电机转速等于与当前手柄摆动角度对应的转速。
13.上述电驱动压路机行驶控制方法中,在满电状态下,行走操纵手柄回至中位时输出最大行车制动电流且在行走电机转速为零时整机控制器控制驻车制动系统启动驻车制动并在驻车制动启动后的预定时间后停止输出行车制动电流。
14.上述电驱动压路机行驶控制方法中,在储电量小于预设数值的非满电状态下执行以下控制:
15.整机控制器向电机控制器发送最大扭矩限制指令、根据手柄摆动角度确定的转速控制指令、不发送零限制反拖扭矩值的反拖扭矩限制指令。
16.上述电驱动压路机行驶控制方法中,在非满电状态下整机控制器向电机控制器发送的最大扭矩限制指令所对应的最大扭矩限制值为压路机设计允许最大值。
17.上述电驱动压路机行驶控制方法中,在非满电状态下行走操控手柄不在中位时整机控制器不向行车制动器输出用于制动的行车制动电流。
18.上述电驱动压路机行驶控制方法中,在非满电状态下行走操纵手柄回至中位时整机控制器向行车制动器输出逐渐增大至最大值的行车制动电流,且在行走电机转速为零时整机控制器启动驻车制动并在驻车制动启动后的预定时间后停止输出行车制动电流。
19.本发明为实现其目的的技术方案是这样的:提供一种电驱动压路机行驶控制系统,其包括整机控制器、行车制动系统、行走驱动系统、行走操纵手柄,所述行走驱动系统包括传动连接在行走电机与驱动桥之间的行走电机和用于控制行走电机的电机控制器,其特征在于行驶控制系统不具有与电机控制器连接的制动电阻;
20.在满电时整机控制器运行控制程序执行如下控制:
21.向电机控制器发送零值反拖扭矩限制指令和最大扭矩限制指令;在行走操纵手柄离开中位时整机控制器向行车制动系统输出最大值的行车制动电流,并在行走操纵手柄离开中位后手柄摆动角度变化时随手柄摆动角度增减对应地减增行车制动电流;在行走操纵手柄不在中位时根据行走操纵手柄的手柄摆动角度向电机控制器发送转速控制指令;行走操纵手柄回至中位时输出最大行车制动电流且在行走电机转速为零时整机控制器控制驻车制动系统启动驻车制动并在驻车制动启动后的预定时间后停止输出行车制动电流;
22.在非满电时整机控制器运行控制程序执行如下控制:
23.整机控制器向电机控制器发送最大扭矩限制指令、根据手柄摆动角度确定的转速控制指令、不发送零限制反拖扭矩值的反拖限制指令;
24.行走操控手柄不在中位时整机控制器不向行车制动器输出用于制动的行车制动电流;
25.行走操纵手柄回至中位时整机控制器向行车制动器输出逐渐增大至最大值的行车制动电流,且在行走电机转速为零时整机控制器启动驻车制动并在驻车制动启动后的预定时间后停止输出行车制动电流。
26.本发明为实现其目的的技术方案是这样的:提供一种电驱动压路机,其特征在于该压路机具有前述的行驶控制系统。
27.本发明与现有技术相比,本发明解决在不设置制动电阻的情况下压路机满电行驶问题,简化了结构,降低成本。
附图说明
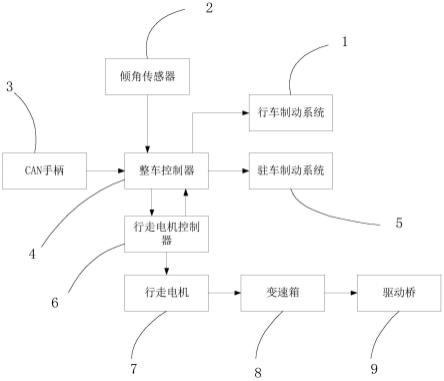
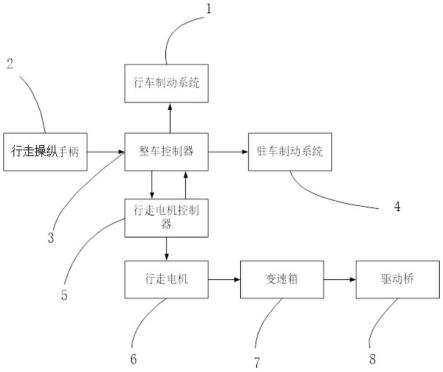
28.图1是本发明电驱动压路机行走控制系统的框图。
29.图2是本发明电驱动压路机满电时的行走控制方法框图。
30.图3是本发明电驱动压路机在非满电时的行走控制方法框图。
31.图中零部件名称及序号:
32.行车制动系统1、行走操纵手柄2、整车控制器3、驻车制动系统4、电机控制器5、行走电机6、变速箱7、驱动桥8。
具体实施方式
33.下面结合附图说明具体实施方案。
34.如图1所示,本实施例中电驱动压路机的行走控制系统包括整机控制器4、行走电机7、行走操纵手柄3、电机控制器6、行车制动系统1、驻车制动系统5等。
35.行走操纵手柄3通过can总线与整机控制器4连接,用于操纵压路机,行走操纵手柄3通过前后摆动和回中位操控压路机行走和驻车制动。当行走操纵手柄3相对机器向前摆动时,行走电机7正转,机器向前行驶;行走操纵手柄3向后摆动时,行走电机7反转。行走操纵手柄3回到中位时,行车制动系统1进行行车制动操作,待行走电机转速为零时,驻车制动系统5进行驻车制动操作,行走操纵手柄3的摆动角度与行走电机7的目标转速线性对应。
36.电机控制器6通过can总线与整机控制器4和行走电机7连接,用于根据整机控制器4的控制指令控制行走电机7转动方向、转速和扭矩。
37.行车制动系统1与整机控制器4连接,用于根据整机控制器4的控制指令进行行车制动或解除行车制动,整机控制器4输出行车制动电流控制行车制动系统1中的行车制动比例阀,行车制动电流越大,行车制动比例阀的阀口开度越大,行车制动系统1产生的制动力矩越大。
38.驻车制动系统5与整机控制器4连接,用于根据整机控制器4的控制指令进行驻车制动或解除驻车制动。
39.整机控制器4获取行走电机7的工作装载信息,包括行走电机转速、行走电机输出扭矩等。
40.整机控制器4包括存储单元和控制单元。
41.存储单元,用于存储控制程序,执行本发明中的控制方法。
42.控制单元用于依据行走操纵手柄3状态变化按预定控制策略控制行走电机7工作,以及控制行车制动系统1和驻车制动系统5工作。行走电机7为永磁同步电机,其与变速箱8连接、变速箱8与驱动桥9连接,驱动桥9驱动压路机后车轮旋转。
43.在本发明中,压路机不设置制动电阻,在动力电池满电的情况下制动减速,不依靠反拖行走电机吸收机器的动能。行走驱动系统包括传动连接在行走电机与驱动桥之间的行走电机和用于控制行走电机的电机控制器。
44.本实施例电驱动压路机行驶控制系统的控制方法如下:
45.行走操纵手柄不在中位时,整机控制器根据手柄摆动角度给电机控制器发送对应转速指令,并解除驻车制动系统的驻车制动。
46.整机控制器获取机器动力电池的储电量,若其储电量大于预定百分比是则认为满
电状态,否则为非满电状态。处于满电状态下的动力电池不能吸收行走电机反拖时产生的电能。
47.在满电状态下执行以下控制:
48.整机控制器向电机控制器发送零值反拖扭矩限制指令和最大扭矩限制指令;
49.电机控制器在接收到零值反拖扭矩限制指令后,即便出现行走驱动系统反拖行走电机时,行走电机不产生电能。
50.最大扭矩限制指令所对应的最大扭矩值与手柄摆动角度正相关,行走手柄摆动角度越大,最大扭矩限制指令所对应的最大扭矩值就越大,反之越小。
51.在行走操纵手柄离开中位时整机控制器向行车制动系统输出最大值的行车制动电流,并在行走操纵手柄离开中位后手柄摆动角度变化时随手柄摆动角度增减对应地减增行车制动电流;行走操纵手柄的摆动角度增大,整机控制器输出行车制动电流减小,行走操纵手柄的摆动角度减小,输出行车制动电流增大,
52.在行走操纵手柄不在中位时根据行走操纵手柄的手柄摆动角度向电机控制器发送转速控制指令。电机控制器根据转速控制指令和最大扭矩限制指令控制行走电机运转至与转速控制指令对应的目标转速。
53.在满电状态下,当行走电机当前转速大于与当前手柄摆动角度对应的转速时以预定斜率在当前行车制动电流的基础上增加行车制动电流,直至行走电机转速等于与当前手柄摆动角度对应的转速;当行走电机当前转速小于与当前手柄摆动角度对应的转速时以预定斜率在当前行车制动电流的基础上减小行车制动电流,直至行走电机转速等于与当前手柄摆动角度对应的转速。
54.在满电状态下,行走操纵手柄回至中位时输出最大行车制动电流且在行走电机转速为零时整机控制器控制驻车制动系统启动驻车制动并在驻车制动启动后的预定时间后停止输出行车制动电流。
55.在非满电状态下执行以下控制,如图3所示:
56.整机控制器向电机控制器发送最大扭矩限制指令、根据手柄摆动角度确定的转速控制指令、不发送零限制反拖扭矩值的反拖扭矩限制指令。
57.在非满电状态下整机控制器向电机控制器发送的最大扭矩限制指令所对应的最大扭矩限制值为压路机设计允许最大值,即最大扭矩限制指令所对应的最大扭矩限制值不随行走操纵手柄摆动角度的不同而具有不同。
58.整机控制器不限制行走电机的反拖扭矩,当行走手柄摆动角度快速减小时,行走驱动系统反拖行走电机,电机控制器控制反拖扭矩,使行走电机产生电能,并将电能存储至动力电池中。
59.在非满电状态下行走操控手柄不在中位时整机控制器不向行车制动器输出用于制动的行车制动电流。在非满电状态下,若需要减速,完全由行走驱动系统反拖行走电机实现,行车制动系统不进行制动。
60.在非满电状态下行走操纵手柄回至中位时整机控制器向行车制动器输出逐渐增大至最大值的行车制动电流,且在行走电机转速为零时整机控制器启动驻车制动并在驻车制动启动后的预定时间后停止输出行车制动电流。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。