技术特征:
1.一种电驱动压路机行驶控制方法,压路机的行走驱动系统包括传动连接在行走电机与驱动桥之间的行走电机和用于控制行走电机的电机控制器,其特征在于压路机不具有制动电阻,控制方法如下:获取动力电池的储电量,在储电量大于预设数值的满电状态下执行以下控制:整机控制器向电机控制器发送零值反拖扭矩限制指令和最大扭矩限制指令;在行走操纵手柄离开中位时整机控制器向行车制动系统输出最大值的行车制动电流,并在行走操纵手柄离开中位后手柄摆动角度变化时随手柄摆动角度增减对应地减增行车制动电流;在行走操纵手柄不在中位时根据行走操纵手柄的手柄摆动角度向电机控制器发送转速控制指令,电机控制器以转速模式控制行走电机运转。2.根据权利要求1所述的电驱动压路机行驶控制方法,其特征在于在满电状态下,整机控制器向电机控制器发送的最大扭矩限制指令所对应的最大扭矩值与手柄摆动角度正相关。3.根据权利要求1或2所述的电驱动压路机行驶控制方法,其特征在于在满电状态下,当行走电机当前转速大于与当前手柄摆动角度对应的转速时以预定斜率在当前行车制动电流的基础上增加行车制动电流,直至行走电机转速等于与当前手柄摆动角度对应的转速;当行走电机当前转速小于与当前手柄摆动角度对应的转速时以预定斜率在当前行车制动电流的基础上减小行车制动电流,直至行走电机转速等于与当前手柄摆动角度对应的转速。4.根据权利要求3所述的电驱动压路机行驶控制方法,其特征在于在满电状态下,行走操纵手柄回至中位时输出最大行车制动电流且在行走电机转速为零时整机控制器控制驻车制动系统启动驻车制动并在驻车制动启动后的预定时间后停止输出行车制动电流。5.根据权利要求1所述的电驱动压路机行驶控制方法,其特征在于在储电量小于预设数值的非满电状态下执行以下控制:整机控制器向电机控制器发送最大扭矩限制指令、根据手柄摆动角度确定的转速控制指令、不发送零限制反拖扭矩值的反拖扭矩限制指令。6.根据权利要求5所述的电驱动压路机行驶控制方法,其特征在于在非满电状态下整机控制器向电机控制器发送的最大扭矩限制指令所对应的最大扭矩限制值为压路机设计允许最大值。7.根据权利要求5所述的电驱动压路机行驶控制方法,其特征在于在非满电状态下行走操控手柄不在中位时整机控制器不向行车制动器输出用于制动的行车制动电流。8.根据权利要求5所述的电驱动压路机行驶控制方法,其特征在于在非满电状态下行走操纵手柄回至中位时整机控制器向行车制动器输出逐渐增大至最大值的行车制动电流,且在行走电机转速为零时整机控制器启动驻车制动并在驻车制动启动后的预定时间后停止输出行车制动电流。9.一种电驱动压路机行驶控制系统,其包括整机控制器、行车制动系统、行走驱动系统、行走操纵手柄,所述行走驱动系统包括传动连接在行走电机与驱动桥之间的行走电机和用于控制行走电机的电机控制器,其特征在于行驶控制系统不具有与电机控制器连接的制动电阻;
在满电时整机控制器运行控制程序执行如下控制:向电机控制器发送零值反拖扭矩限制指令和最大扭矩限制指令;在行走操纵手柄离开中位时整机控制器向行车制动系统输出最大值的行车制动电流,并在行走操纵手柄离开中位后手柄摆动角度变化时随手柄摆动角度增减对应地减增行车制动电流;在行走操纵手柄不在中位时根据行走操纵手柄的手柄摆动角度向电机控制器发送转速控制指令;行走操纵手柄回至中位时输出最大行车制动电流且在行走电机转速为零时整机控制器控制驻车制动系统启动驻车制动并在驻车制动启动后的预定时间后停止输出行车制动电流;在非满电时整机控制器运行控制程序执行如下控制:整机控制器向电机控制器发送最大扭矩限制指令、根据手柄摆动角度确定的转速控制指令、不发送零限制反拖扭矩值的反拖限制指令;行走操控手柄不在中位时整机控制器不向行车制动器输出用于制动的行车制动电流;行走操纵手柄回至中位时整机控制器向行车制动器输出逐渐增大至最大值的行车制动电流,且在行走电机转速为零时整机控制器启动驻车制动并在驻车制动启动后的预定时间后停止输出行车制动电流。10.一种电驱动压路机,其特征在于该压路机具有权利要求9中所述的行驶控制系统。
技术总结
本发明涉及电驱动压路机,为解决针对现有电驱动压路机需要配备制动电阻以便实现满电行驶的问题;提供一种电驱动压路机及其行驶控制方法和系统,其中控制方法步骤是满电状态下执行以下控制:整机控制器向电机控制器发送零值反拖扭矩限制指令和最大扭矩限制指令;在行走操纵手柄离开中位时整机控制器向行车制动系统输出最大值的行车制动电流,并在行走操纵手柄离开中位后手柄摆动角度变化时随手柄摆动角度增减对应地减增行车制动电流;在行走操纵手柄不在中位时根据行走操纵手柄的手柄摆动角度向电机控制器发送转速控制指令。本发明解决在不设置制动电阻的情况下压路机满电下坡行驶,简化了结构,降低成本。降低成本。降低成本。
技术研发人员:罗剑伟 陶林裕 孙金泉 蔡登胜 吴韦林 陈云宇 张国新 黄晓 徐峰 韦振华 张恒 韦慧玲
受保护的技术使用者:广西柳工机械股份有限公司
技术研发日:2022.04.18
技术公布日:2022/8/9
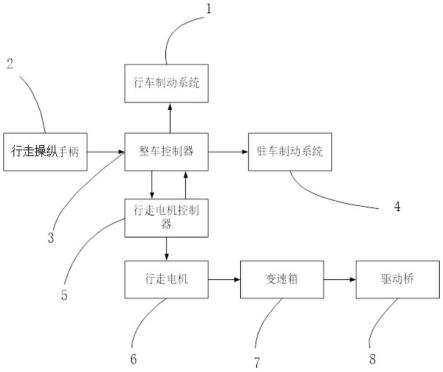
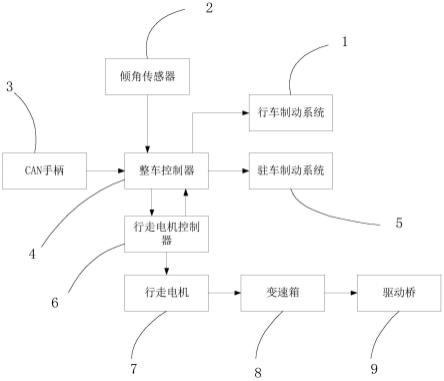
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。