1.本实用新型属于姿态传感、体传感设备技术领域,尤其涉及一种基于三维霍尔力传感器的控制设备的装配结构。
背景技术:
2.传统摇杆类控制设备多采用电阻刷式传感器,刷头位置变化引起电阻变化,长期使用刷头磨损影响精度。
3.传统摇杆类力控设备输出摇杆位移信号,无法实际测量摇杆受力大小。
4.现有定位方式主要有视觉定位与电磁波信号强度定位。视觉定位需要特定定位图案,在图案被遮挡或污染时易发生定位丢失;电磁波信号强度定位在生活生产环境受环境干扰大,分辨率低。
技术实现要素:
5.针对现有技术的缺陷和不足,希望利用无接触的霍尔传感器,解决传统电刷接触磨损带来的精度损失问题,使用三轴力传感器代替传统位移式摇杆从而实现力的测量,解决传统技术无法原生输出力控信号的问题。
6.考虑到现有技术中没有现成的基于三维霍尔力传感器的控制设备的装配结构设计,本实用新型的目的在于提供一种基于三维霍尔力传感器的控制设备的装配结构,提供硬件结构方面的解决方案,其主要包括:在结构上实现使用三维霍尔力传感器可以测量摇杆受力以提供原生力矢量信号,安装设置有天线为后续更高精度空间定位提供硬件基础,设置符合体感的按键和震动马达为交互提供更多的可能性,以及合理设计握把与护臂提供舒适使用体验。
7.本实用新型具体采用以下技术方案:
8.一种基于三维霍尔力传感器的控制设备的装配结构,其特征在于:握把(6)通过握把连接部(7)与力传感器壳体(8)刚性连接;所述力传感器壳体(8)通过多个紧固件(16)连接弹性填充体(9);所述弹性填充体(9)位于力传感器壳体(8)的一端设置有磁铁(15),另一端设置有三维霍尔传感器(17)。
9.进一步地,环状天线(14)和控制电路板(13)安装于连接部(7)的内侧;所述控制电路板(13)分别与环状天线(14)和三维霍尔传感器(17)构成电气连接。
10.进一步地,所述握把(6)的底部设置有电池仓,顶部设置有震动马达(11)和顶部接触板(4),侧部设置有握把按钮(5);所述控制电路板(13)分别与震动马达(11)、顶部接触板(4)和握把按钮(5)分别构成电气连接。
11.进一步地,所述弹性填充体(9)的底部连接有z形的连接支架(3),所述连接支架(3)上设置有绑带(1)和泡棉(2),构成与握把(6)相垂直的护臂结构。
12.进一步地,外接接口(10)设置在所述弹性填充体(9)的底部,与控制电路板(13)构成电气连接。
13.相比于现有技术,本实用新型及其优选方案在结构上实现使用三维霍尔力传感器可以测量摇杆受力以提供原生力矢量信号,安装设置有天线为后续更高精度空间定位提供硬件基础,设置符合体感的按键和震动马达为交互提供更多的可能性,以及合理设计握把与护臂提供舒适使用体验。具有广泛的应用前景。
14.比如,经过进一步开发,用于机械手相比于传统位移控制,力控制能避免因位移超程引起的被抓取工件与机械手损坏;六自由度空间定位能用于与握把按钮能对机械臂提供示教功能。
15.用于元宇宙交互控制相比于传统控制手柄,可以通过三维霍尔力传感器与震动马达,有潜力能提供原生力交互体验,能够输出使用者实际施力情况;六自由度空间定位与握把按钮能够用于在元宇宙中实现位置与视角的完全运动控制。
附图说明
16.下面结合附图和具体实施方式对本实用新型进一步详细的说明:
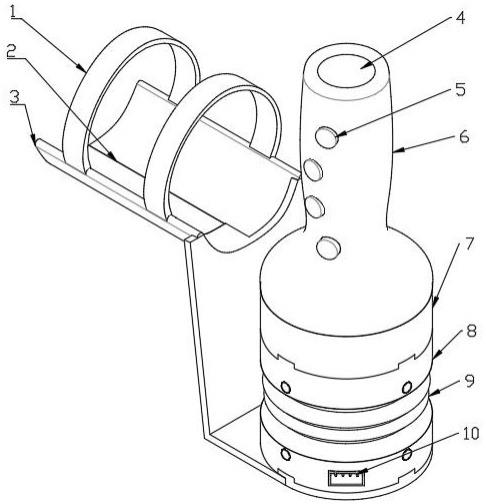
17.图1为本实用新型实施例结构等轴侧视图;
18.图2为本实用新型实施例结构剖视示意图。
19.图中:1-绑带;2-泡棉;3-连接支架;4-顶部触摸板;5-握把按钮;6-握把;7-握把连接部;8-力传感器壳体;9-弹性填充体;10-外接接口;11-震动马达;12-电池;13-控制单元;14-环形天线;15-磁铁;16-紧固件;17-三维霍尔传感器。
具体实施方式
20.为让本专利的特征和优点能更明显易懂,下文特举实施例,作详细说明如下:
21.如图1、图2所示,本实施例提供的基于三维霍尔力传感器的控制设备的装配结构当中:握把6通过握把连接部7与力传感器壳体8刚性连接;力传感器壳体8通过多个紧固件16连接弹性填充体9;弹性填充体9位于力传感器壳体8的一端设置有磁铁15,另一端设置有三维霍尔传感器17。
22.以上基础结构当中,握把连接部7为塑料材质便于信号传输,握把6、握把连接部7与力传感器壳体8刚性连接,可以将握把所受力传递至弹性填充体9,使其产生形变从而改变磁铁15与三维霍尔传感器17相对位置,产生力矢量信号,实现本实施例设计最基础的功能。本实施例中,三维霍尔传感器17可以根据实际需要进行器件选型,本实施例不对其作为特别的限制。
23.环状天线14和控制电路板13安装于连接部7的内侧;控制电路板13分别与环状天线14和三维霍尔传感器17构成电气连接。
24.其中,环状天线14的基本功能在于信号无线传输,控制电路板13上一般情况下可以包含有单片机控制系统。电路设计并不是本实用新型的技术内容,本领域技术人员可以在现有技术的基础上根据实际需求完成选型和设计。比如,在具体产品的设计时,可以选用特定型号的环状天线以接收超宽频电磁波信号,以便通过现有算法,利用信号时间差解算出空间位置,并通过加速度计采集的数据实时补偿位置变化。
25.在本实施例中,握把6的底部设置有电池仓用于安装电池12,顶部设置有震动马达11和顶部接触板4,侧部设置有握把按钮5;控制电路板13分别与震动马达11、顶部接触板4
和握把按钮5分别构成电气连接。
26.作为优选,震动马达11可以选用由上部转子马达与下部线性马达构成的交叉轴震动马达,能提供握把的周向与轴向震动。当然,也可以根据实际需要选用其他合适款式的震动马达。
27.在本实施例中,弹性填充体9的底部连接有类似z形的连接支架3,连接支架3上设置有绑带1和泡棉2,构成与握把6相垂直的护臂结构。
28.绑带1与泡棉2固定在连接支架3上,适于操作者手部握持握把6,同时大拇指自然置于顶部触摸板4操作区,四指落于4个握把按钮5上。
29.在使用时,小臂从绑带1中穿过,大拇指落于顶部触摸板4,四指落于握把按钮5,可以自然地握住握把6。
30.外接接口10设置在弹性填充体9的底部,与控制电路板13构成电气连接。外接接口10作为结构上预留的外部数据通道,一般可以用于烧录固件,比如用于对握把按钮5与顶部触摸板4功能进行编程数据的写入。
31.需要特别说明的是,本实用新型主要公开和请求保护的技术内容仅包含硬件结构的设计,其余部分包括具体电路和控制的实现并不为本方案所限,本实施例涉及的相关说明仅为帮助本领域技术人员更好地理解本方案在结构上的设计目的,以及理解其应用前景。
32.本专利不局限于上述最佳实施方式,任何人在本专利的启示下都可以得出其它各种形式的基于三维霍尔力传感器的控制设备的装配结构,凡依本实用新型申请专利范围所做的均等变化与修饰,皆应属本专利的涵盖范围。
技术特征:
1.一种基于三维霍尔力传感器的控制设备的装配结构,其特征在于:握把(6)通过握把连接部(7)与力传感器壳体(8)刚性连接;所述力传感器壳体(8)通过多个紧固件(16)连接弹性填充体(9);所述弹性填充体(9)位于力传感器壳体(8)的一端设置有磁铁(15),另一端设置有三维霍尔传感器(17)。2.根据权利要求1所述的基于三维霍尔力传感器的控制设备的装配结构,其特征在于:环状天线(14)和控制电路板(13)安装于连接部(7)的内侧;所述控制电路板(13)分别与环状天线(14)和三维霍尔传感器(17)构成电气连接。3.根据权利要求2所述的基于三维霍尔力传感器的控制设备的装配结构,其特征在于:所述握把(6)的底部设置有电池仓,顶部设置有震动马达(11)和顶部接触板(4),侧部设置有握把按钮(5);所述控制电路板(13)分别与震动马达(11)、顶部接触板(4)和握把按钮(5)分别构成电气连接。4.根据权利要求1所述的基于三维霍尔力传感器的控制设备的装配结构,其特征在于:所述弹性填充体(9)的底部连接有z形的连接支架(3),所述连接支架(3)上设置有绑带(1)和泡棉(2),构成与握把(6)相垂直的护臂结构。5.根据权利要求2所述的基于三维霍尔力传感器的控制设备的装配结构,其特征在于:外接接口(10)设置在所述弹性填充体(9)的底部,与控制电路板(13)构成电气连接。
技术总结
本实用新型提出一种基于三维霍尔力传感器的控制设备的装配结构,其特征在于:握把(6)通过握把连接部(7)与力传感器壳体(8)刚性连接;所述力传感器壳体(8)通过多个紧固件(16)连接弹性填充体(9);所述弹性填充体(9)位于力传感器壳体(8)的一端设置有磁铁(15),另一端设置有三维霍尔传感器(17)。其在结构上实现使用三维霍尔力传感器可以测量摇杆受力以提供原生力矢量信号,安装设置有天线为后续更高精度空间定位提供硬件基础,设置符合体感的按键和震动马达为交互提供更多的可能性,以及合理设计握把与护臂提供舒适使用体验。具有广泛的应用前景。应用前景。应用前景。
技术研发人员:陈为平 饶孟宇 陈胤龙 邱泽源 肖培杭 黄捷 林瑞全
受保护的技术使用者:福州大学
技术研发日:2022.03.25
技术公布日:2022/8/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
