1.本发明涉及智能垃圾箱技术领域,具体地,涉及一种智能垃圾箱系统及垃圾投放引导方法。
背景技术:
2.随着垃圾分类政策的推广推进,需要逐步引导居民践行垃圾分类原则,加强垃圾分类管理处理工作。
3.为了实现上述目标,目前主要的垃圾分类引导及管理方案主要是以人工引导、定时投放为手段,定时定点开放垃圾投放点,并安排专人在垃圾投放点进行垃圾分类的引导和监督,针对未按照规定进行垃圾分类的居民予以指正或教育,非垃圾投放时间撤去所有垃圾桶,并设置监控摄像头对非垃圾投递时间乱扔垃圾的行为进行记录。
4.通过上述手段虽然可以有效推行垃圾分类工作,但存在如下几个不足之处:引导监督工作、撤桶转运工作均需安排专人管理,人力成本巨大;定时投放垃圾对居民生活造成一定不便;引导工作以人工批评指正为主,难以调动居民积极性;垃圾分类工作成果缺少量化指标,难以评估垃圾分类推行效果。
5.在公告号为cn110422513b的专利文献中公开了一种基于物联网的智能分类垃圾箱系统及智能分类垃圾箱,属于物联网术领域。智能分类垃圾箱系统包括多个智能分类垃圾箱及远程服务器;智能分类垃圾箱包括控制单元及通信单元;在检测到有垃圾投入时,获取当前垃圾图像;基于本地垃圾识别模型识别出当前垃圾种类,若无法识别,则发送给远程服务器以利用远程垃圾识别模型进行识别;若远程服务器无法识别,则开启拾音器获取垃圾名称信息;基于垃圾名称信息识别出垃圾种类;基于种类识别结果,控制垃圾分拣执行机构将当前垃圾引导至对应子垃圾存储箱。该技术方案存在如下问题:垃圾识别准确率低、响应慢;分拣机构复杂、成本高,若不同种类垃圾混合投入,分拣的正确率和效率都很低。现阶段,还是依靠居民自觉进行垃圾分类比较现实。
技术实现要素:
6.针对现有技术中的缺陷,本发明的目的是提供一种智能分类垃圾箱系统及分类方法。
7.根据本发明提供的一种智能垃圾箱系统,包括:单个或多个两桶位单元箱以及与其连接的云端服务器;
8.所述两桶位单元箱包括顶棚、背板和箱体;所述顶棚与背板连接,所述背板与箱体连接;所述顶棚为中空结构,所述顶棚内置控制器和5g通信模块;所述背板是箱体与顶棚之间的支撑结构,所述背板包括显示屏及音箱和外置摄像头,所述显示屏及音箱和外置摄像头与控制器连接;
9.所述箱体包括垃圾仓及取桶门、垃圾箱盖及垃圾投放口、内置摄像头、内置接近传感器、外置传感器和刷卡器,所述内置摄像头安装在垃圾箱盖内侧,所述内置接近传感器安
装在垃圾箱盖内侧,所述刷卡器安装在箱体上方。
10.优选地,所述控制器用于控制云端通讯、箱盖开关、音视频播放以及摄像头和传感器的数据计算与处理。
11.优选地,所述顶棚还包括太阳能电池板及蓄电池,在不满足接入市电的现场条件下,每个两桶位单元箱选装一组太阳能电池板及蓄电池,使用太阳能获取电力,并将多余电力储存在蓄电池中供夜间或阳光较弱时使用。
12.优选地,所述显示屏及音箱播放多媒体资源;
13.所述外置摄像头拍摄垃圾箱前方画面;
14.所述垃圾仓及取桶门放置分类垃圾桶,所述取桶门设有锁定机构,通过机械钥匙或刷ic或id卡打开取桶门;
15.所述垃圾投放口用于居民分类投放垃圾,所述垃圾箱盖为垃圾投放口的密封盖板,设有驱动电机;所述垃圾盖板上贴有垃圾分类标识;所述垃圾箱盖内侧安装有内置摄像头及内置接近传感器;
16.所述内置摄像头在当垃圾箱盖关闭时正对垃圾仓内垃圾桶内部,拍摄垃圾桶内垃圾画面;
17.所述内置接近传感器为超声波传感器或红外漫反射传感器或其他类似功能传感器,当垃圾箱盖关闭时正对垃圾仓内垃圾桶内部,检测垃圾桶内垃圾高度;
18.所述外置传感器检测是否有人体接近垃圾箱;
19.所述刷卡器为ic卡或id卡刷卡器,读取ic或id卡识别信息。
20.优选地,所述云端服务器进行用户身份鉴别、行为记录和积分统计,所述控制器通过5g通信模块与所述云端服务器进行通信。
21.优选地,所述外置传感器包括接近传感器或激光雷达,所述接近传感器包括超声波传感器和红外传感器;当所述外置传感器选用接近传感器时,将其安装在箱体的前方,感应是否有人体接近;当所述外置传感器选用激光雷达时,将其安装在顶棚上方的前端,并持续向周围发射多束激光,探测是否有人体来到垃圾箱前方。
22.本发明还提供一种垃圾投放引导方法,所述方法应用上述中的智能垃圾箱系统,所述方法包括如下步骤:
23.步骤s1:在无人靠近垃圾箱的情况下,垃圾箱背板上安装的显示屏及音箱循环播放垃圾分类引导视频,传播垃圾分类相关知识,或播放广告内容,并行执行内置传感器检测垃圾桶内垃圾高度,若垃圾高度超出预设值,则控制器向云端服务器发送垃圾箱编号及满桶垃圾桶的垃圾类型,请求调度清理人员,清理人员通过网页或后台程序接收到调度指令,驾驶对应垃圾类型的清运车前往垃圾箱进行垃圾清运;若垃圾高度未超出预设值,则不作额外操作;
24.步骤s2:箱体前方安装的接近传感器时刻感应是否有物体接近,当有物体接近时,控制器调用垃圾箱外置摄像头拍摄前方画面,并识别画面中是否有人接近;
25.步骤s3:记录该用户id,并判断是否在指定的垃圾投放时间。
26.优选地,所述步骤s2中若画面中没有识别出人,则进入步骤s2.1;若画面中检测到人,则进入步骤s2.2;
27.步骤s2.1:继续待命;
28.步骤s2.2:判断画面中是否能识别到人脸信息。
29.优选地,所述步骤s2.2中若未检测到人脸信息,则进入步骤s2.2.1,若检测到人脸信息,则进入步骤s2.2.2;
30.步骤s2.2.1:提示用户刷ic卡或id卡鉴别身份,若在指定时间内刷卡,则进入步骤s3;若未在指定时间内刷卡,则返回步骤s1;
31.步骤s2.2.2:控制器提取人脸信息与服务端进行匹配;若服务端存在该人脸信息,则进入步骤s3;若服务端不存在该人脸信息,则转到步骤s2.2.1。
32.优选地,所述步骤s3中若不在指定的垃圾投放时间,音视频播放提示,并转跳步骤s1;若在指定的垃圾投放时间或未设置垃圾投放时间,则进入步骤s3.1;
33.步骤s3.1:播放引导视频,显示用户id当前积分,并指导用户垃圾分类标准,并打开垃圾箱盖,等待用户投放垃圾,进入步骤s3.2;
34.步骤s3.2:外置传感器检测接近距离,若接近距离小于预设值,则继续返回步骤s3.2继续检测;若接近距离大于预设值,则进入步骤s3.3;
35.步骤s3.3:关闭垃圾箱盖,启动内置摄像头拍摄垃圾桶内画面,控制器识别垃圾桶内画面并分析画面中新增垃圾是否符合对应的垃圾分类标准;
36.所述步骤s3.3中若垃圾分类合格,则进入步骤s3.3.1;若垃圾分类不合格,则进入步骤s3.3.2;
37.步骤s3.3.1:播放感谢音视频,请求服务器增加该用户id的积分,转跳步骤s1;
38.步骤s3.3.2:音视频提示分类不合格,请求服务器扣除该用户id积分,转跳步骤s1。
39.与现有技术相比,本发明具有如下的有益效果:
40.1、本发明的智能垃圾箱系统及垃圾投放引导方法,可以有效解决人工引导、定时投放的垃圾分类管理方式的不足;
41.2、本发明充分调动居民垃圾分类积极性,优化垃圾分类人力资源调配,减少垃圾分类人力成本,并提供量化垃圾分类工作效果的数据支撑。
附图说明
42.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
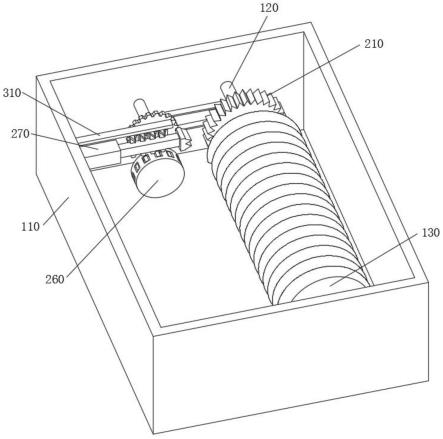
43.图1为本发明一种实施例的两桶位单元箱结构示意图;
44.图2为本发明另一种实施例的两桶位单元箱结构示意图;
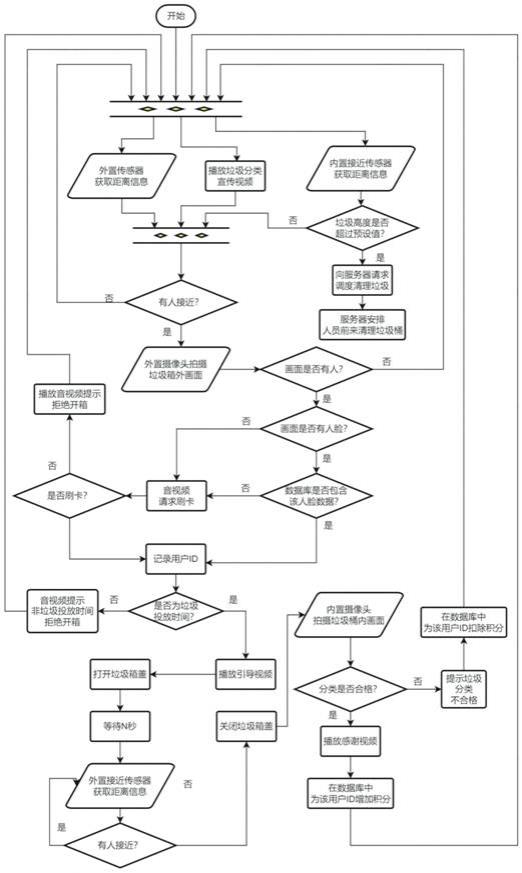
45.图3为本发明功能流程示意图。
具体实施方式
46.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
47.实施例1:
48.根据本发明提供的一种智能垃圾箱系统,包括:单个或多个两桶位单元箱以及与其连接的云端服务器。
49.两桶位单元箱包括顶棚、背板和箱体;顶棚与背板连接,背板与箱体连接;顶棚为中空结构,顶棚内置控制器和5g通信模块;背板是箱体与顶棚之间的支撑结构,背板包括显示屏及音箱和外置摄像头,显示屏及音箱和外置摄像头与控制器连接。
50.箱体包括垃圾仓及取桶门、垃圾箱盖及垃圾投放口、内置摄像头、内置接近传感器、外置传感器和刷卡器,内置摄像头安装在垃圾箱盖内侧,内置接近传感器安装在垃圾箱盖内侧,刷卡器安装在箱体上方。
51.控制器用于控制云端通讯、箱盖开关、音视频播放以及摄像头和传感器的数据计算与处理。顶棚还包括太阳能电池板及蓄电池,在不满足接入市电的现场条件下,每个两桶位单元箱选装一组太阳能电池板及蓄电池,使用太阳能获取电力,并将多余电力储存在蓄电池中供夜间或阳光较弱时使用。
52.显示屏及音箱播放多媒体资源;外置摄像头拍摄垃圾箱前方画面;垃圾仓及取桶门放置分类垃圾桶,取桶门设有锁定机构,通过机械钥匙或刷ic或id卡打开取桶门;垃圾投放口用于居民分类投放垃圾,垃圾箱盖为垃圾投放口的密封盖板,设有驱动电机;垃圾盖板上贴有垃圾分类标识;垃圾箱盖内侧安装有内置摄像头及内置接近传感器;内置摄像头在当垃圾箱盖关闭时正对垃圾仓内垃圾桶内部,拍摄垃圾桶内垃圾画面;内置接近传感器为超声波传感器或红外漫反射传感器或其他类似功能传感器,当垃圾箱盖关闭时正对垃圾仓内垃圾桶内部,检测垃圾桶内垃圾高度;外置传感器检测是否有人体接近垃圾箱;刷卡器为ic卡或id卡刷卡器,读取ic或id卡识别信息。
53.云端服务器进行用户身份鉴别、行为记录和积分统计,控制器通过5g通信模块与云端服务器进行通信。外置传感器包括接近传感器或激光雷达,接近传感器包括超声波传感器和红外传感器;当外置传感器选用接近传感器时,将其安装在箱体的前方,感应是否有人体接近;当外置传感器选用激光雷达时,将其安装在顶棚上方的前端,并持续向周围发射多束激光,探测是否有人体来到垃圾箱前方。
54.本发明还提供一种垃圾投放引导方法,方法应用上述中的智能垃圾箱系统,方法包括如下步骤:
55.步骤s1:在无人靠近垃圾箱的情况下,垃圾箱背板上安装的显示屏及音箱循环播放垃圾分类引导视频,传播垃圾分类相关知识,或播放广告内容,并行执行内置传感器检测垃圾桶内垃圾高度,若垃圾高度超出预设值,则控制器向云端服务器发送垃圾箱编号及满桶垃圾桶的垃圾类型,请求调度清理人员,清理人员通过网页或后台程序接收到调度指令,驾驶对应垃圾类型的清运车前往垃圾箱进行垃圾清运;若垃圾高度未超出预设值,则不作额外操作。
56.步骤s2:箱体前方安装的接近传感器时刻感应是否有物体接近,当有物体接近时,控制器调用垃圾箱外置摄像头拍摄前方画面,并识别画面中是否有人接近。
57.步骤s2中若画面中没有识别出人,则进入步骤s2.1;若画面中检测到人,则进入步骤s2.2。
58.步骤s2.1:继续待命。
59.步骤s2.2:判断画面中是否能识别到人脸信息。
60.步骤s2.2中若未检测到人脸信息,则进入步骤s2.2.1,若检测到人脸信息,则进入步骤s2.2.2。
61.步骤s2.2.1:提示用户刷ic卡或id卡鉴别身份,若在指定时间内刷卡,则进入步骤s3;若未在指定时间内刷卡,则返回步骤s1。
62.步骤s2.2.2:控制器提取人脸信息与服务端进行匹配;若服务端存在该人脸信息,则进入步骤s3;若服务端不存在该人脸信息,则转到步骤s2.2.1。
63.步骤s3:记录该用户id,并判断是否在指定的垃圾投放时间。
64.步骤s3中若不在指定的垃圾投放时间,音视频播放提示,并转跳步骤s1;若在指定的垃圾投放时间或未设置垃圾投放时间,则进入步骤s3.1。
65.步骤s3.1:播放引导视频,显示用户id当前积分,并指导用户垃圾分类标准,并打开垃圾箱盖,等待用户投放垃圾,进入步骤s3.2。
66.步骤s3.2:外置传感器检测接近距离,若接近距离小于预设值,则继续返回步骤s3.2继续检测;若接近距离大于预设值,则进入步骤s3.3。
67.步骤s3.3:关闭垃圾箱盖,启动内置摄像头拍摄垃圾桶内画面,控制器识别垃圾桶内画面并分析画面中新增垃圾是否符合对应的垃圾分类标准。
68.步骤s3.3中若垃圾分类合格,则进入步骤s3.3.1;若垃圾分类不合格,则进入步骤s3.3.2。
69.步骤s3.3.1:播放感谢音视频,请求服务器增加该用户id的积分,转跳步骤s1。
70.步骤s3.3.2:音视频提示分类不合格,请求服务器扣除该用户id积分,转跳步骤s1。
71.服务器定期对同一区域所有垃圾箱的用户进行积分统计,根据统计结果可量化该区域内居民垃圾分类工作的执行效果;市政部门利用服务器的居民垃圾分类积分系统,使用积分兑换、积分抵扣、积分考核的奖惩方式提高居民垃圾分类积极性,培养垃圾分类良好习惯。
72.实施例2:
73.实施例2为实施例1的优选例,以更为具体地对本发明进行说明。
74.本专利提出一种智能分类垃圾箱系统,针对上述方案的不足之处,利用人工智能、5g移动通信等技术,减少垃圾分类的人力占用、合理分配人员资源,提高垃圾分类投放灵活性和便捷性,采取用户积分的方式量化垃圾分类工作效果,并提高居民垃圾分类积极性。
75.本专利提出一种智能分类垃圾箱系统,该系统由单个或多个两桶位单元箱组成,两桶位单元箱结构如图1所示:
76.两桶位单元箱主要的部件包括:
77.顶棚,又叫集成机箱:箱体顶棚为中空结构,顶棚内部空间防水通风,集成机箱功能,内置控制器、5g通信模块等。
78.控制器:用于控制云端通讯、箱盖开关、音视频播放及摄像头数据处理、传感器数据计算等功能。
79.5g通信模块:控制器通过5g通信模块接入5g移动网络,实现互联网资源的访问。
80.太阳能电池板及蓄电池(选配):在不满足接入市电的现场条件下,两桶位单元箱可选装太阳能电池板及蓄电池,使用太阳能获取电力,并将多余电力储存在蓄电池中供夜
间或阳光较弱时使用。
81.背板:
82.支撑结构:箱体与顶棚之间的支撑结构。
83.显示屏及音箱:连接至控制器,用于播放多媒体资源。
84.外置摄像头:连接至控制器,拍摄垃圾箱前方画面。
85.箱体:
86.垃圾仓及取桶门:用于放置分类垃圾桶,取桶门设有锁定机构,可通过机械钥匙或刷ic或id卡打开取桶门。
87.垃圾箱盖及垃圾投放口:垃圾投放口用于居民分类投放垃圾,垃圾箱盖为垃圾投放口的密封盖板,设有驱动电机,可实现电动开关功能;垃圾盖板上贴有垃圾分类标识以区分垃圾类别;垃圾箱盖内侧安装有内置摄像头及内置接近传感器。
88.内置摄像头:安装在垃圾箱盖内侧,具有补光功能,当垃圾箱盖关闭时正对垃圾仓内垃圾桶内部,用于拍摄垃圾桶内垃圾画面。
89.内置接近传感器:安装在垃圾箱盖内侧,为超声波传感器或红外漫反射传感器或其他类似功能传感器,当垃圾箱盖关闭时正对垃圾仓内垃圾桶内部,用于检测垃圾桶内垃圾高度。
90.外置接近传感器:安装在箱体前方,用于检测是否有人体接近箱体。
91.刷卡器:安装在箱体上方,为ic卡或id卡刷卡器,可以读取ic或id卡识别信息。
92.另设有云端服务器,用于用户身份鉴别、行为记录、积分统计等,控制器通过5g通信模块与云端服务器进行通信。
93.具体功能工作流程如下:
94.垃圾分类引导功能:
95.步骤1:在无人靠近垃圾箱的情况下,垃圾箱背板上安装的显示屏及音箱循环播放垃圾分类引导视频,传播垃圾分类相关知识,或播放广告内容,与此同时,并行执行。
96.内置传感器检测垃圾桶内垃圾高度:若垃圾高度超出预设值,则控制器向云端服务器发送垃圾箱编号及满桶垃圾桶的垃圾类型,请求调度清理人员,清理人员通过网页或后台程序可以接收到调度指令,驾驶对应垃圾类型的清运车前往垃圾箱进行垃圾清运;若垃圾高度未超出预设值,则不作额外操作。
97.步骤2:箱体前方安装的接近传感器时刻感应是否有物体接近,当有物体接近时,控制器调用垃圾箱外置摄像头拍摄前方画面,并识别画面中是否有人接近。
98.若画面中没有识别出人,则进入步骤2.1;若画面中检测到人,则进入步骤2.2。
99.步骤2.1:继续待命。
100.步骤2.2:判断画面中是否能识别到人脸信息;若未检测到人脸信息,则进入步骤2.2.1:若检测到人脸信息,则进入步骤2.2.2。
101.步骤2.2.1:提示用户刷ic卡或id卡鉴别身份;若在指定时间内刷卡,则进入步骤3;若未在指定时间内刷卡,则返回步骤1。
102.步骤2.2.2:控制器提取人脸信息与服务端进行匹配;若服务端存在该人脸信息,则进入步骤3;若服务端不存在该人脸信息,则转到步骤2.2.1。
103.步骤3:记录该用户id,并判断是否在指定的垃圾投放时间(如有设置);若不在指
定的垃圾投放时间,音视频播放提示,并转跳步骤1;若在指定的垃圾投放时间或未设置垃圾投放时间,则进入步骤3.1。
104.步骤3.1:播放引导视频,显示用户id当前积分,并指导用户垃圾分类标准,并打开垃圾箱盖,等待用户投放垃圾,进入步骤3.2。
105.步骤3.2:外置传感器检测接近距离;若接近距离小于预设值,则继续返回步骤3.2继续检测;若接近距离大于预设值,则进入步骤3.3。
106.步骤3.3:关闭垃圾箱盖,启动内置摄像头拍摄垃圾桶内画面,控制器识别垃圾桶内画面并分析画面中新增垃圾是否符合对应的垃圾分类标准;若垃圾分类合格,则进入步骤3.3.1;若垃圾分类不合格,则进入步骤3.3.2。
107.步骤3.3.1:播放感谢音视频,请求服务器增加该用户id的积分,转跳步骤1。
108.步骤3.3.2:音视频提示分类不合格,请求服务器扣除该用户id积分,转跳步骤1。
109.服务器积分功能:服务器定期对同一区域所有垃圾箱的用户进行积分统计,根据统计结果可量化该区域内居民垃圾分类工作的执行效果,除此之外,市政部门还可以利用服务器的居民垃圾分类积分系统,使用积分兑换、积分抵扣、积分考核等奖惩方式提高居民垃圾分类积极性,培养垃圾分类良好习惯。
110.视频监控功能:控制器获取外置摄像头画面,并将画面实时推送至云端服务器,用于环卫系统后台监控、城市安防监控等功能。
111.实施例3
112.随着垃圾分类政策的推广推进,全国各地都在大力推行垃圾分类管理工作。
113.为了对垃圾分类工作管理更加精细化、智能化,具有自动感应开盖、视频监控等功能的智能垃圾箱越来越受到欢迎。
114.为了实现对投放垃圾人员的接近感应,常用的传感器方案有超声波传感器、红外漫反射传感器、热释电传感器、微波传感器等。
115.本专利提出一种以激光雷达为传感器的智能垃圾箱技术方案,提高对垃圾投放人员的感应精度,实现更加可靠的自动开箱、自动摄像等智能垃圾箱功能。
116.本专利提出一种以激光雷达为传感器的智能垃圾箱技术方案,系统包括下列几个组成部分:
117.箱体:箱体内部空间用于存放垃圾桶,箱体侧面设置有取桶门,便于取放箱体内垃圾桶,箱体顶面设置有垃圾箱盖,便于垃圾投放人员从上方投放垃圾进箱体内的垃圾桶,且垃圾箱盖配有驱动电机,可通过电信号控制垃圾箱盖自动开启和关闭。
118.顶棚(集成机箱):箱体顶棚为中空结构,顶棚内部空间防水通风,集成机箱功能,内置控制器、电源适配器等电气设备等。
119.控制器:用于获取激光雷达数据,对激光雷达数据进行解析和计算,判断是否有垃圾投放人员接近箱体;通过电信号控制垃圾箱盖开启、关闭;录制摄像头画面至控制器内部的存储单元。
120.背板:箱体与顶棚之间的支撑结构。
121.激光雷达:安装在顶棚下方,与控制器相连接,用于感应垃圾投放人员是否接近。
122.摄像头:安装在垃圾箱上或垃圾箱旁,与控制器相连接,用于记录垃圾箱附近画面。
123.系统工作流程:
124.步骤1:激光雷达传感器连续向周围发射多个红外激光束,对周围物体进行探测,并判断每一束激光探测到的点的距离,即点云信息;控制器从激光雷达获取点云信息,从点云信息中提取具有人体特征的一组点,对该组点进行连续计算,判断其距离及相对速度,并根据计算结果判断人体是否接近垃圾箱体:
125.若判断人体距离箱体距离超过预设值且继续接近箱体,则进入步骤2,否则返回步骤1。
126.步骤2:检测到人体接近箱体,控制器发送信号,控制电机打开垃圾箱盖,同时,控制器从摄像头中获取画面,并记录至控制器内部的存储单元中,进入步骤2.1。
127.步骤2.1:保持上述状态的同时,控制器从激光雷达获取点云信息,持续跟踪目标人体,判断人体是否超出距离预设值并远离箱体移动,若是,进入步骤3,若否,返回步骤2.1。
128.步骤3:检测到人体离开垃圾箱体,控制器发送信号,控制电机关闭垃圾箱盖,同时,控制器停止从摄像头中获取画面,返回步骤1。
129.本专利提出的以激光雷达为传感器的智能垃圾箱技术方案,可有效的避免几种常见传感器的缺陷,利用激光雷达盲区小、数据可靠性高、抗干扰能力强、测量信息丰富的优点,有效提高对垃圾投放人员的感应精度,实现更加可靠的自动开箱、自动摄像等智能垃圾箱功能。
130.本领域技术人员可以将本实施例理解为实施例1、实施例2的更为具体的说明。
131.本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
132.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。