数据处理方法和装置、车端设备、云端服务器和电子设备
1.本技术是分案申请,原申请的申请号是202080004481.7,原申请日是2020年2月17 日,原申请的全部内容通过引用结合在本技术中。
技术领域
2.本公开涉及自动驾驶技术领域,尤其涉及一种数据处理方法和装置、车端设备、自动驾驶车辆、云端服务器、交互系统、电子设备和存储介质。
背景技术:
3.自动驾驶车辆是一种通过电脑系统实现无人驾驶的智能车辆,路侧单元是自动驾驶中的重要参与者。自动驾驶车辆可接入路侧单元,路侧单元可向接入的自动驾驶车辆提供各种业务服务。
4.在现有技术中,自动驾驶车辆接入路侧单元的方法包括:自动驾驶车辆对路侧单元发送的业务数据包进行解析,确定路侧单元承载的业务类型,并针对业务类型中的至少部分业务进行鉴权,在鉴权通过时生成并发送初始化信息至路侧单元,自动驾驶车辆接入至路侧单元,路侧单元为自动驾驶车辆提供与初始化信息对应的业务服务。
5.然而,发明人在实现本公开的过程中,发现通过上述现有技术中的方式至少存在以下问题:自动驾驶车辆接入路侧单元的耗时较长。
技术实现要素:
6.本公开实施例提供了一种数据处理方法和装置、车端设备、自动驾驶车辆、云端服务器、交互系统、电子设备和存储介质。
7.根据本公开实施例的一个方面,本公开实施例提供了一种数据处理方法,所述方法包括:
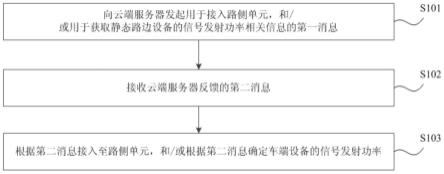
8.向云端服务器发起用于接入路侧单元,和/或用于获取静态路边设备的信号发射功率相关信息的第一消息;
9.接收所述云端服务器反馈的第二消息,其中,所述第二消息是所述云端服务器基于所述第一消息和预存的高精地图确定的,且所述第二消息包括所述车端设备接入所述路侧单元的相关信息,和/或所述静态路边设备的信号发射功率相关信息;
10.根据所述第二消息接入至所述路侧单元,和/或根据所述第二消息确定车端设备的信号发射功率。
11.其中,第一消息中还可以携带车端设备的标识和/或车端设备的位置信息。
12.若第一消息中携带车端设备的位置信息,则云端设备基于车端设备的位置信息和高精地图确定第二消息。
13.在本公开实施例中,若第一消息为用于接入路侧单元的消息,则车端设备通过与云端服务器之间的交互,可以获取包括接入路侧单元的相关信息的第二消息,以便基于第二消息直接接入至路侧单元,以避免现有技术中车端设备接入路侧单元时需要经过繁琐的
验证程序,从而实现节约车端设备接入路侧单元的时间。
14.在本公开实施例中,若第一消息为用于获取静态路边设备的信号发射功率相关信息的第一消息,则车端设备通过与云端服务器之间的交互,可以对车端设备的发射功率进行适应性调整,以避免静态路边设备的信号被干扰,从而实现静态路边设备的可靠性和稳定性。
15.在一些实施例中,若所述第二消息包括所述静态路边设备的信号发射功率相关信息,则所述静态路边设备的信号发射功率相关信息包括用于对所述车端设备的信号发射功率进行调整的调整指令。
16.在一些实施例中,所述方法还包括:
17.接收所述云端服务器发送的所述高精地图;
18.根据所述高精地图对所述车端设备的信号发射功率进行调整。
19.在本公开实施例中,可以由车端设备基于云端服务器发送的高精地图对车端设备的发射功率进行调整。
20.在一些实施例中,所述根据所述高精地图对所述车端设备的信号发射功率进行调整包括:
21.从所述高精地图中提取与所述车端设备的位置信息对应的静态路边设备的属性信息;
22.根据所述静态路边设备的属性信息对所述车端设备的信号发射功率进行调整。
23.在一些实施例中,所述静态路边设备的属性信息包括信号覆盖范围与信号发射功率之间的对应关系,所述根据所述静态路边设备的属性信息对所述车端设备的信号发射功率进行调整包括:
24.响应于所述位置信息位于所述对应关系中的信号覆盖范围,从所述对应关系中确定与所述信号覆盖范围对应的信号发射功率;
25.根据所述与所述信号覆盖范围对应的信号发射功率对所述车端设备的信号发射功率进行调整。
26.根据本公开实施例的另一个方面,本公开实施例还提供了一种数据处理方法,所述方法包括:
27.接收车端设备发起的用于接入路侧单元,和/或用于获取静态路边设备的信号发射功率相关信息的第一消息;
28.根据所述第一消息和预存的高精地图确定第二消息,其中,所述第二消息包括所述车端设备接入所述路侧单元的相关信息,和/或所述静态路边设备的信号发射功率相关信息;
29.将所述第二消息发送至所述车端设备,以便所述车端设备根据根据所述第二消息接入至所述路侧单元,或者根据所述第二消息确定所述车端设备的信号发射功率。
30.在一些实施例中,若所述第二消息包括所述静态路边设备的信号发射功率相关信息,则所述静态路边设备的信号发射功率相关信息包括用于对所述车端设备的信号发射功率进行调整的调整指令。
31.在一些实施例中,若所述第一消息包括所述车端设备的位置信息,则根据所述第一消息预存的高精地图确定第二消息包括:
32.从所述高精地图中提取与所述车端设备的位置信息对应的静态路边设备的属性信息;
33.根据所述静态路边设备的属性信息生成包括所述调整指令的所述第二消息。
34.在一些实施例中,所述静态路边设备的属性信息包括信号覆盖范围与信号发射功率之间的对应关系,所述根据所述静态路边设备的属性信息生成包括所述调整指令的所述第二消息包括:
35.响应于所述位置信息位于所述对应关系中的信号覆盖范围,从所述对应关系中确定与所述信号覆盖范围对应的信号发射功率;
36.根据所述与所述信号覆盖范围对应的信号发射功率生成所述调整指令。
37.在一些实施例中,所述方法包括:
38.获取路边设施的位置信息,并获取所述路边设施的属性信息,其中,所述路边设施包括所述路侧单元和/或所述静态路边设备,所述路边设施的属性信息包括所述路侧单元的属性信息和/或所述静态路边设备的属性信息;
39.根据所述路边设施的位置信息、所述路边设施的属性信息和预设的矢量地图构建所述高精地图。
40.在本公开实施例中,通过基于路边设施的位置信息、路边设施的属性信息和预设的矢量地图对高精地图进行构建,以便可通过高精地图对路边设施的位置信息、路边设施的属性信息进行确定,以便实现提前对车端设备的接入路侧单元的请求进行鉴权,并生成包括车端设备接入路侧单元的相关信息的第二消息,以便车端设备可基于接入路侧单元的相关信息接入至路侧单元,从而节约车端设备接入至路侧单元的时间,提高接入效率。
41.同理,在本公开实施例中,通过基于路边设施的位置信息、路边设施的属性信息和预设的矢量地图对高精地图进行构建,以便可通过高精地图对路边设施的位置信息、路边设施的属性信息进行确定,并根据路边设施的属性信息生成包括静态路边设备的信号发射功率相关信息的第二消息,以便车端设备基于第二消息对车端设备的发射功率进行适应性调整,避免车端设备的发射功率对静态路边设备的信号的干扰,从而提高静态路边设备的可靠性和稳定性。
42.在一些实施例中,所述根据所述路边设施的位置信息、所述路边设施的属性信息和预设的矢量地图构建所述高精地图包括:
43.根据所述路边设施的位置信息将所述路边设施以节点的形式添加至所述矢量地图中;
44.将所述路边设施的属性信息作为所述节点的属性字段进行存储,生成所述高精地图。
45.在一些实施例中,所述路侧单元的属性信息包括接入所述路侧单元的相关信息,所述静态路边设备的属性信息包括信号覆盖范围与发射功率之间的对应关系。
46.在一些实施例中,所述获取路边设施的位置信息包括:
47.采集道路对应的点云信息和/或视频信息,从所述点云信息和/或视频信息中提取所述位置信息;或者,
48.基于测绘设备获取所述位置信息。
49.在本公开实施例中,提供了多种确定位置信息的方式,如基于点云信息确定位置
信息;又如,基于视频信息确定位置信息;又如,基于测绘设备确定位置信息,其中测绘设备中包括但不限于全站仪。
50.根据本公开实施例的另一个方面,本公开实施例还提供了一种数据处理装置,所述装置包括:
51.第一发送模块,用于向云端服务器发起用于接入路侧单元,和/或用于获取静态路边设备的信号发射功率相关信息的第一消息;
52.第一接收模块,用于接收所述云端服务器反馈的第二消息,其中,所述第二消息是所述云端服务器基于所述第一消息和预存的高精地图确定的,且所述第二消息包括所述车端设备接入所述路侧单元的相关信息,和/或所述静态路边设备的信号发射功率相关信息;
53.第一处理模块,用于根据所述第二消息接入至所述路侧单元,和/或根据所述第二消息确定车端设备的信号发射功率。
54.在一些实施例中,若所述第二消息包括所述静态路边设备的信号发射功率相关信息,则所述静态路边设备的信号发射功率相关信息包括用于对所述车端设备的信号发射功率进行调整的调整指令。
55.在一些实施例中,所述第一接收模块还用于,接收所述云端服务器发送的所述高精地图;
56.所述第一处理模块还用于,根据所述高精地图对所述车端设备的信号发射功率进行调整。
57.在一些实施例中,所述第一处理模块还用于,从所述高精地图中提取与所述车端设备的位置信息对应的静态路边设备的属性信息,并根据所述静态路边设备的属性信息对所述车端设备的信号发射功率进行调整。
58.在一些实施例中,所述静态路边设备的属性信息包括信号覆盖范围与信号发射功率之间的对应关系,所述第一处理模块用于,响应于所述位置信息位于所述对应关系中的信号覆盖范围,从所述对应关系中确定与所述信号覆盖范围对应的信号发射功率,并根据所述与所述信号覆盖范围对应的信号发射功率对所述车端设备的信号发射功率进行调整。
59.根据本公开实施例的另一个方面,本公开实施例还提供了一种数据处理装置,所述装置包括:
60.第二接收模块,用于接收车端设备发起的用于接入路侧单元,和/或用于获取静态路边设备的信号发射功率相关信息的第一消息;
61.第二处理模块,用于根据所述第一消息和预存的高精地图确定第二消息,其中,所述第二消息包括所述车端设备接入所述路侧单元的相关信息,和/或所述静态路边设备的信号发射功率相关信息;
62.第二发送模块,用于将所述第二消息发送至所述车端设备,以便所述车端设备根据根据所述第二消息接入至所述路侧单元,或者根据所述第二消息确定所述车端设备的信号发射功率。
63.在一些实施例中,若所述第二消息包括所述静态路边设备的信号发射功率相关信息,则所述静态路边设备的信号发射功率相关信息包括用于对所述车端设备的信号发射功率进行调整的调整指令。
64.在一些实施例中,若所述第一消息包括所述车端设备的位置信息,则所述第二处
理模块用于,从所述高精地图中提取与所述车端设备的位置信息对应的静态路边设备的属性信息,并根据所述静态路边设备的属性信息生成包括所述调整指令的所述第二消息。
65.在一些实施例中,所述静态路边设备的属性信息包括信号覆盖范围与信号发射功率之间的对应关系,所述第二处理模块用于,响应于所述位置信息位于所述对应关系中的信号覆盖范围,从所述对应关系中确定与所述信号覆盖范围对应的信号发射功率,并根据所述与所述信号覆盖范围对应的信号发射功率生成所述调整指令。
66.在一些实施例中,所述装置还包括:
67.获取模块,用于获取路边设施的位置信息,并获取所述路边设施的属性信息,其中,所述路边设施包括所述路侧单元和/或所述静态路边设备,所述路边设施的属性信息包括所述路侧单元的属性信息和/或所述静态路边设备的属性信息;
68.构建模块,用于根据所述路边设施的位置信息、所述路边设施的属性信息和预设的矢量地图构建所述高精地图。
69.在一些实施例中,所述构建模块还用于,根据所述路边设施的位置信息将所述路边设施以节点的形式添加至所述矢量地图中,并将所述路边设施的属性信息作为所述节点的属性字段进行存储,生成所述高精地图。
70.在一些实施例中,所述路侧单元的属性信息包括接入所述路侧单元的相关信息,所述静态路边设备的属性信息包括信号覆盖范围与发射功率之间的对应关系。
71.在一些实施例中,所述获取模块用于,所述获取路边设施的位置信息包括:
72.采集道路对应的点云信息和/或视频信息,从所述点云信息和/或视频信息中提取所述位置信息;或者,
73.基于测绘设备获取所述位置信息。
74.根据本公开实施例的另一个方面,本公开实施例还提供了一种车端设备,所述车端设备包括如上任一实施例项所述的装置。
75.根据本公开实施例的另一个方面,本公开实施例还提供了一种自动驾驶车辆,所述自动驾驶车辆包括如上实施例项所述的车端设备。
76.根据本公开实施例的另一个方面,本公开实施例还提供了一种云端服务器,所述云端服务器包括如上任一项所述的装置。
77.根据本公开实施例的另一个方面,本公开实施例还提供了一种芯片,所述芯片用于执行如上任一实施例所述的方法。
78.根据本公开实施例的另一个方面,本公开实施例还提供了一种车载盒子,所述车载盒子包括上述任一实施例所述的装置。
79.根据本公开实施例的另一个方面,本公开实施例还提供了一种交互系统,所述交互系统包括如上实施例所述的自动驾驶车辆和如上述实施例所述的云端服务器。
80.根据本公开实施例的另一个方面,本公开实施例还提供了一种电子设备,包括:
81.至少一个处理器;以及
82.与所述至少一个处理器通信连接的存储器;其中,
83.所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行如上任一实施例所述的方法。
84.根据本公开实施例的另一个方面,本公开实施例还提供了一种计算机存储介质所
述计算机指令用于使所述计算机执行如上任一实施例所述的方法。
附图说明
85.附图用于更好地理解本公开实施例,不构成对本公开的限定。其中,
86.图1为本公开实施例的数据处理方法的应用场景的示意图;
87.图2为本公开实施例的数据处理方法的流程示意图;
88.图3为本公开实施例的构建高精地图的方法的流程示意图;
89.图4为本公开实施例的根据路边设施的位置信息、路边设施的属性信息和预设的矢量地图构建高精地图的方法的流程示意图;
90.图5为本公开实施例的数据处理方法的交互示意图;
91.图6为本公开实施例的数据处理方法的交互示意图;
92.图7为本公开实施例的数据处理方法的交互示意图;
93.图8为本公开实施例的数据处理装置的框图;
94.图9为本公开实施例的自动驾驶车辆的框图;
95.图10为本公开实施例的数据处理装置的框图;
96.图11为本公开实施例的电子设备的框图。
具体实施方式
97.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本公开相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本公开的一些方面相一致的装置和方法的例子。
98.请参阅图1,图1为本公开实施例的数据处理方法的应用场景的示意图。
99.如图1所示,自动驾驶车辆100行驶于道路200上,在道路200的路边设置有路侧单元300,且在道路200上还设置有电子停车不收费系统400。
100.其中,自动驾驶车辆100、路侧单元300和电子停车不收费系统400均可与云端服务器500进行交互,且,自动驾驶车辆100也可分别与路侧单元300和电子停车不收费系统400进行交互。
101.在现有技术中,自动驾驶车辆100接入路侧单元300之前需要进行繁琐的验证过程,并在验证通过后接入至路侧单元300,以便路侧单元300为自动驾驶车辆100提供业务服务。
102.而在本公开实施例中,自动驾驶车辆100在接入路侧单元300之前,可提前与云端服务器500进行交互,并经过与云端服务器500的交互后得到接入至路侧单元300的相关信息,并基于该接入路侧单元300的相关信息接入至路侧单元300,从而实现节约接入时间。具体地实现方法后续将进行详细阐述。
103.且,在本公开实施例中,自动驾驶车辆100还可基于与云端服务器500的交互,获取电子停车不收费系统400的信号发射功率相关信息,以便对自身(自动驾驶车辆100) 的信号发射功率进行适应性调整,以避免对电子停车不收费系统400的信号发射功率造成影响,从而实现确保电子停车不收费系统400的可靠性。具体地实现方法后续将进行详细阐述。
104.下面以具体地实施例对本公开的技术方案以及本技术的技术方案如何解决上述技术问题进行详细说明。下面这几个具体的实施例可以相互结合,对于相同或相似的概念或过程可能在某些实施例中不再赘述。下面将结合附图,对本公开的实施例进行描述。
105.根据本公开实施例的一个方面,本公开实施例提供了一种数据处理方法。
106.请参阅图2,图2为本公开实施例的数据处理方法的流程示意图。
107.如图2所示,该方法包括:
108.s101:向云端服务器发起用于接入路侧单元,和/或用于获取静态路边设备的信号发射功率相关信息的第一消息。
109.其中,本公开实施例的执行主体可以为数据处理装置,且数据处理装置可以为设置于自动驾驶车辆的车端设备,包括计算机、服务器、车载终端、远程信息处理器(车载 t-box)和芯片(如嵌入式芯片)等。
110.在本公开实施例中,车端设备可以与云端服务器建立通信链路,并通过该通信链路与云端服务器进行交互。
111.其中,路侧单元(road side unit,rsu),安装在路侧,可采用专用短程通信技术 (dedicated short range communicat ion,dsrc)技术与自动驾驶车辆(具体为车端设备) 交互,实现车辆身份识别,电子扣分的装置。
112.值得说明地是,尽管在现有技术中,自动驾驶车辆也可以接入至路侧单元,并与路侧单元进行交互,但是,基于本公开实施例的背景技术可知,在现有技术中,自动驾驶车辆在接入路侧单元,并接入路侧单元提供的业务服务之前,需要进行繁琐的验证的过程,从而导致自动驾驶车辆接入路侧单元,并接入业务服务的时间较长的弊端。
113.而在本公开实施例中,由自动驾驶车辆(具体由车端设备)与云端服务器进行交互,以便提前进行验证(后续将进行详细的阐述),从而实现节约接入路侧单元,且接入业务服务的时间的技术效果。
114.其中,静态路边设备用于表征设置于路边的静态的设备,且该设备可以发射信号,且其发射信号的发射功率可能受到其他信号的发射功率的干扰,如电子停车不收费系统 (electronic toll collect,etc)。
115.在该步骤中,车端设备可以向云端服务器发送第一消息,且第一消息可以用于表征车端设备接入路侧单元的请求。即,车端设备可以通过向云端服务器发送第一消息,以便云端服务器获悉车端设备接入路侧单元的需求。
116.当然,第一消息也可以用于表征车端设备获取静态路边设备的信号发射功率相关信息。
117.当然,第一消息可以既用于表征车端设备接入路侧单元的请求,又用于表征车端设备获取静态路边设备的信号发射功率相关信息。
118.s102:接收云端服务器反馈的第二消息,其中,第二消息是云端服务器基于第一消息和预存的高精地图确定的,且第二消息包括车端设备接入路侧单元的相关信息,和/ 或静态路边设备的信号发射功率相关信息。
119.其中,高精地图包括路侧单元的属性信息和静态路边设备的属性信息。
120.也就是说,云端服务器在接到收第一消息之后,可基于第一消息和高精地图向车端设备反馈与第一消息对应的第二消息。如,若第一消息为用于接入路侧单元的消息,则第
二消息为车端设备接入路侧单元的相关信息;若第一消息为用于获取静态路边设备的信号发射公里相关信息的消息,则第二消息为静态路边设备的信号发射功率相关信息。
121.s103:根据第二消息接入至路侧单元,和/或根据第二消息确定车端设备的信号发射功率。
122.在本公开实施例中,若第二消息包括车端设备接入路侧单元的相关信息,则车端设备根据第二消息接入至路侧单元,避免现有技术中车端设备与路侧单元之间繁琐的验证过程,节约了车端设备接入至路侧单元的时间,以实现车端设备快捷方便地接受路侧单元提供的业务服务。
123.同理,在本公开实施例中,若第二消息包括静态路边设备的信号发射功率相关信息,则车端设备根据第二消息确定信号发射功率,以便以该确定出的信号发射功率进行信号的发射,从而避免对电子停车不收费系统的发射信号的发射功率的影响,确保电子停车不收费系统的稳定性和可靠性。
124.现结合附图对构建高精地图进行详细阐述。
125.请参阅图3,图3为本公开实施例的构建高精地图的方法的流程示意图。
126.如图3所示,构建高精地图的方法包括:
127.s01:获取路边设施的位置信息,并获取路边设施的属性信息,其中,路边设施包括路侧单元和/或静态路边设备,路边设施的属性信息包括路侧单元的属性信息和/或静态路边设备的属性信息。
128.其中,执行构建高精地图的方法的执行主体可以为云端服务器。
129.在一些实施例中,获取路边设施的位置信息可具体包括:采集道路对应的点云信息和/或视频信息,从点云信息和/或视频信息中提取位置信息;或者,
130.基于测绘设备获取位置信息。
131.也就是说,在一些实施例中,可通过对道路对应的点云信息进行采集,并基于点云信息确定位置信息,也可通过对道路对应的视频信息进行采集,并基于视频信息确定位置信息,也可以通过测绘设备对位置信息进行确定,测绘设备包括但不限于全站仪。
132.值得说明地是,由于点云信息的精度相对于视频信息的精度偏高,且当为视频信息时,还需要使用专业的测绘设备来获得路边设施的位置信息,因此,优选采用对点云信息进行采集,以便提高后续确定出的高精地图的精确性和可靠性。
133.具体地,在道路的路口和/或道路的两侧可设置用于对行驶于道路的自动驾驶车辆的相关的点云信息和/或视频信息进行采集的图像采集设备,且图像采集设备与云端服务器之间可进行交互,以便图像采集设备将其采集到的点云信息和/或视频信息发送至云端服务器。
134.在一些实施例中,图像采集设备包括但不限于雷达和摄像机。
135.其中,路侧单元的属性信息用于表征与路侧单元的业务相关的信息和权限相关的信息,包括但不限于业务服务类型和业务鉴权信息。
136.静态路边设备的属性信息用于表征静态路边设备在工作状态时对各参数的要求,包括但不限于覆盖范围与发射功率之间的对应关系。其中,此处的覆盖范围用于表征静态路边设备在工作状态时,静态路边设备的信号能够覆盖的范围。
137.也就是说,在该步骤中,云端服务器可以基于点云信息和/或视频信息确定路侧单
元的位置信息,也可以确定静态路边设备的位置信息。且,云端服务器还可以获取路侧单元的属性信息,也可以获取静态路边设备的属性信息。
138.值得说明地是,在云端服务器分别与路侧单元和静态路边设备建立通信链路时(如可包括注册的过程),云端服务器可采集路侧单元的属性信息和静态路边单元的属性信息,并将采集到的路侧单元的属性信息和静态路边单元的属性信息进行存储。即,路侧单元的属性信息和静态路边设备的属性信息可以为预先存储于云端服务器中的。
139.s02:根据路边设施的位置信息、路边设施的属性信息和预设的矢量地图构建高精地图。
140.其中,矢量地图可以理解为现有技术中的高精地图。也就是说,本公开实施例中的高精地图为在现有技术的高精地图的基础上进行创建的。且,具体为在现有技术的高精地图的基础上添加了路边设施的位置信息和路边设施的属性信息。
141.结合图4可知,在一些实施例中,s02包括:
142.s021:根据路边设施的位置信息将路边设施以节点的形式添加至矢量地图中。
143.值得说明地是,在确定出路边设施的位置信息后,可确定出路边设施在矢量地图中的位置。因此,在该步骤中,可根据路边设施的位置信息将路边设施添加至矢量地图中,且路边设施为矢量地图中的某个节点。
144.当然在一些实施例中,还可以为各节点设置类型,以便对不同类型(如路侧单元和静态路边设备)的路边设施进行区分。
145.s022:将路边设施的属性信息作为节点的属性字段进行存储,生成高精地图。
146.该步骤可具体包括:为各节点(即各路边设施)设置属性字段,并将路边设施的属性信息填写至属性字段中,得到高精地图。
147.现结合附图对路边设施包括路侧单元,且车端设备接入路侧单元时的数据处理方法进行阐述。
148.请参阅图5,图5为本公开实施例的数据处理方法的交互示意图。
149.如图5所示,该方法包括:
150.s1:车端设备向云端服务器发送用于接入路侧单元的第一消息。
151.s2:云端服务器从本地存储器中提取高精地图。
152.其中,高精地图的构建方法可参见上述示例,此处不再赘述。
153.s3:云端服务器从高精地图中提取路侧单元的属性信息,并根据路侧单元的属性信息确定包括车端设备接入至路侧单元的相关信息的第二消息。
154.其中,接入至路侧单元的相关信息用于表征车端设备接入至路侧单元的凭证,车端设备可基于该接入至路侧单元的相关信息接入至路侧单元。
155.其中,云端服务器根据路侧单元的属性信息确定车端设备接入至路侧单元的相关信息可具体通过下述方法实现:
156.云端服务器接收到第一消息后,可对车端设备的标识和位置进行获取,云端服务器根据车端设备的标识确定车端设备能够从路侧单元获取的业务服务类型(即车端设备已经购买的业务服务类型),且云端服务器根据车端设备的位置可从高精地图中确定车端设备能够接入的路侧单元(下文简称目标路侧单元)。
157.云端服务器从高精地图中提取目标路侧单元的属性信息,即目标路侧单元的业务
服务类型和业务鉴权信息。
158.云端服务器根据业务鉴权信息对车端设备的接入权限进行验证,即基于业务鉴权信息对车端设备能够接入进行验证,如果验证通过,则生成车端设备接入至目标路侧单元的相关信息,如果验证失败,则流程结束。
159.其中,车端设备的标识可以为车端设备的设备编码,也可以自动驾驶车辆的牌照,等等。且,车端设备的标识可以携带于第一消息中,且车端设备的位置信息也可以携带于第一消息中,以便将车端设备的位置信息上报至云端服务器。
160.s4:云端服务器将包括车端设备接入至目标路侧单元的相关信息的第二消息发送至车端设备。
161.s5:车端设备将包括车端设备接入至目标路侧单元的相关信息发送至目标路侧单元。
162.s6:目标路侧单元对包括车端设备接入至目标路侧单元的相关信息进行验证,并在验证通过后,完成车端设备的接入,并向车端设备提供相应的业务服务(如图5中所示的s6’)。
163.值得说明地是,尽管该步骤也包括验证,但是,该步骤的验证仅用于对包括车端设备接入至目标路侧单元的相关信息本身验证,即可以理解为对该包括车端设备接入至目标路侧单元的相关信息的可靠性进行验证,即验证其是否为云端服务器发送的,如果是,则直接允许车端设备的接入,并向车端设备提供相应的业务服务,以提高接入的可靠性。
164.当然,目标路侧单元在接收到车端设备发送的包括车端设备接入至目标路侧单元的相关信息时,可直接允许车端设备的接入,并向车端设备提供相应的业务服务。
165.值得说明地是,在现有技术中,是由车端设备直接向路侧单元发送接入请求,并在进行一系列验证后,车端设备可接入至路侧单元,并接受路侧单元提供的业务服务。然而,由于验证过程较为繁琐,因此造成了车端设备接入路侧单元的时间较长的弊端。
166.然而,在本公开实施例中,车端设备可基于其存在的接入路侧单元的需求提前与云端服务器进行交互,以便后续直接接入至路侧单元。相当于由云端服务器提前对车端设备接入路侧单元的请求进行验证,从而节约了车端设备接入至路侧单元的时间。
167.其中,云端服务器和车端设备之间可通过4g、5g进行交互,车端设备和路侧单元之间可通过车对外界的信息交换(vehicle to x,v2x)进行交互。
168.现结合附图对路边设施包括静态路边设备,且车端设备获取静态路边设备的信号发射功率相关信息时的数据处理方法进行阐述。
169.在一些实施例中,请参阅图6,图6为本公开实施例的数据处理方法的交互示意图。
170.如图6所示,该方法包括:
171.s7:车端设备向云端服务器发送用于获取静态路边设备的信号发射功率相关信息的第一消息。
172.s8:云端服务器从本地存储器中提取高精地图。
173.其中,高精地图的构建方法可参见上述示例,此处不再赘述。
174.s9:云端服务器确定车端设备的位置信息。
175.其中,车端设备的位置信息可以携带于第一消息中。如,车端设备在向云端服务器发送第一消息时,可在第一消息中携带车端设备的位置信息。
176.s10:云端服务器根据车端设备的位置信息从高精地图中提取目标静态路边单元的属性信息。
177.s11:云端服务器根据目标静态路边单元的属性信息生成包括静态路边设备的信号发射功率相关信息的第二消息,其中,静态路边设备的信号发射功率相关信息包括对车端设备的发射功率进行调整的调整指令。
178.值得说明地是,高精地图中存储了不同位置的静态路边单元的属性信息,而车端设备于静态路边单元之间的距离大于某阈值时,车端设备不会对静态路边单元的信号发射功率造成影响,因此,目标静态路边单元用于表征信号发射功率可能被车端设备影响的静态路边单元。因此,在该步骤中,云端服务器根据车端设备的位置信息从高精地图中选取信号发射功率可能被车端设备影响的静态路边单元,并将该部分静态路边单元标记为目标静态路边单元。
179.其中,静态路边设备的属性信息包括信号覆盖范围与信号发射功率之间的对应关系,因此,该步骤可具体包括:云端服务器判断车端设备的位置信息对应的位置是否位于信号覆盖范围之内,如果是,则云端服务器从高精地图中提取车端设备的位置信息对应的位置位于信号覆盖范围之内的静态路边单元,并将该静态路边单元标记为目标静态路边单元,并提取目标静态路边单元的属性信息。
180.s12:云端服务器将包括静态路边设备的信号发射功率相关信息的第二消息发送至车端设备。
181.s13:车端设备根据第二消息,即根据调整指令对车端设备的信号发射功率进行调整。
182.在一些实施例中,调整指令可以用于指示车端设备将车端设备的信号发射功率进行降低的指示,且可携带覆盖范围对应的信号发射功率,以便车端设备将车端设备的信号发射功率调整至小于覆盖范围对应的信号发射功率的值。
183.当然,在另一些实施例中,调整指令还可以用于表征车端设备的信号发射功率的调整后的值,以便车端设备将其当前的信号发射功率调整至调整指令对应的调整后的值。
184.在一些实施例中,请参阅图7,图7为本公开实施例的数据处理方法的交互示意图。
185.如图7所示,该方法包括:
186.s14:当车端设备接入至云端服务器时,云端服务器将高精地图发送至车端设备。
187.其中,车端设备接入至云端服务器可采用现有技术方案中的方法,此处不再赘述。
188.在一些实施例中,在该步骤中,可由云端服务器对车端设备的接入进行监测,当监测当车端设备接入至云端服务器时,云端服务器将高精地图发送至车端设备。
189.在一些实施例中,云端服务器将高精地图发送至车端设备可具体包括:
190.云端服务器可直接将高精地图发送至车端设备。或者,
191.从高精地图中选取与车端设备的位置信息对应的部分高精地图发送至车端设备。且,与车端设备的位置信息对应的部分高精地图用于表征高精地图中与车端设备的位置信息对应的位置在预设范围内的部分的高精地图,即部分高精地图可以为以车端设备在高精地图中的位置原点,选取预设半径范围内的部分的高精地图,当然,也可以以车端设备在高精地图中的位置为起点,以自动驾驶车辆的行驶方向为选取方向,从高精地图中选取预设范围内的部分的高精地图。或者,
192.云端服务器对车端设备的位置信息进行获取,而基于上述示例可知,可至少通过两种方式对车端设备的位置信息进行获取,具体可参见上述示例,且具体基于车端设备的位置信息选取部分高精地图也可参见上述示例,此处不再赘述。
193.也就是说,在该步骤中,云端服务器发送至车端设备的高精地图可以为至少部分高精地图。
194.s15:车端设备对其所处的位置进行定位,得到车端设备的位置信息。即车端设备通过定位的方式获取车端设备的位置信息。
195.其中,定位的方式可通过雷达或者gps实现,具体的定位的方式可参见现有技术,此处不再赘述。
196.s16:车端设备提取与车端设备的位置信息对应的目标静态路边设备。
197.其中,该步骤可具体包括:根据车端设备的位置信息和高精地图判断是否存在被车端设备的信号发射功率影响的静态路边设备,如果是,则提取出该静态路边设备,并将该静态路边设备标记为目标静态路边设备。
198.s17:车端设备提取目标静态路边设备的属性信息。
199.其中,目标静态路边设备的属性信息包括信号覆盖范围与信号发射功率之间的对应关系。
200.s18:车端设备根据与信号覆盖范围对应的信号发射功率对车端设备的信号发射功率进行调整。
201.在该步骤中,车端设备在确定出目标静态路边设备的信号发射功率后,基于该目标静态路边设备的信号发射公里对车端设备的信号发射功率进行调整,如降低车端设备的信号发射功率,以便尽可能地避免由于车端设备对目标静态路边设备的信号发射功率造成的干扰,从而提高目标静态路边设备的稳定性和可靠性。
202.根据本公开实施例的另一个方面,本公开实施例还提供了一种数据处理装置。
203.请参阅图8,图8为本公开实施例的数据处理装置的框图。
204.如图8所示,所述数据处理装置包括:
205.第一发送模块11,用于向云端服务器发起用于接入路侧单元,和/或用于获取静态路边设备的信号发射功率相关信息的第一消息;
206.第一接收模块12,用于接收所述云端服务器反馈的第二消息,其中,所述第二消息是所述云端服务器基于所述第一消息和预存的高精地图确定的,且所述第二消息包括所述车端设备接入所述路侧单元的相关信息,和/或所述静态路边设备的信号发射功率相关信息;
207.第一处理模块13,用于根据所述第二消息接入至所述路侧单元,和/或根据所述第二消息确定车端设备的信号发射功率。
208.在一些实施例中,若所述第二消息包括所述静态路边设备的信号发射功率相关信息,则所述静态路边设备的信号发射功率相关信息包括用于对所述车端设备的信号发射功率进行调整的调整指令。
209.在一些实施例中,所述第一接收模块12还用于,接收所述云端服务器发送的所述高精地图;
210.所述第一处理模块13还用于,根据所述高精地图对所述车端设备的信号发射功率
进行调整。
211.在一些实施例中,所述第一处理模块13还用于,从所述高精地图中提取与所述车端设备的位置信息对应的静态路边设备的属性信息,并根据所述静态路边设备的属性信息对所述车端设备的信号发射功率进行调整。
212.在一些实施例中,所述静态路边设备的属性信息包括信号覆盖范围与信号发射功率之间的对应关系,所述第一处理模块13用于,响应于所述位置信息位于所述对应关系中的信号覆盖范围,从所述对应关系中确定与所述信号覆盖范围对应的信号发射功率,并根据所述与所述信号覆盖范围对应的信号发射功率对所述车端设备的信号发射功率进行调整。
213.根据本公开实施例的另一方面,本公开实施例还提供了一种车端设备,所述车端设备包括上述任一实施例所述的装置。
214.根据本公开实施例的另一个方面,本公开实施例还提供了一种自动驾驶车辆,所述自动驾驶车辆包括上述实施例所述的车端设备。
215.请参阅图9,图9为本公开实施例的自动驾驶车辆的框图。
216.如图9所示,该自动驾驶车辆包括:处理器201,外部存储器接口202,内部存储器 203,通用串行总线(universal serial bus,usb)接口204,电源管理模块205,天线1,天线2,移动通信模块206,无线通信模块207,传感器208,摄像头209,车载盒子210。可以理解的是,本实施例示意的结构并不构成对自动驾驶车辆的具体限定。
217.其中,传感器208包括如图9中所述的雷达以及其他传感器。
218.在本公开的另一些实施例中,自动驾驶车辆可以包括比图示更多或更少的部件,或者组合某些部件,或者拆分某些部件,或者不同的部件布置。且,图示的部件可以以硬件,软件,或软件和硬件的组合实现。
219.处理器201可以包括一个或多个处理单元,例如:处理器201可以包括应用处理器 (application processor,ap),调制解调处理器,图形处理器(graphics process ing unit,gpu),图像信号处理器(image signal processor,isp),控制器,视频编解码器,数字信号处理器(digital s ignal processor,dsp),基带处理器,和/或神经网络处理器 (neural-network processing unit,npu)等。其中,不同的处理单元可以是独立的器件,也可以集成在一个或多个处理器中。在一些实施例中,自动驾驶车辆也可以包括一个或多个处理器201。其中,处理器201可以是自动驾驶车辆的神经中枢和指挥中心。处理器201可以根据指令操作码和时序信号,产生操作控制信号,完成取指令和执行指令的控制。处理器201中还可以设置存储器,用于存储指令和数据。在一些实施例中,处理器201中的存储器为高速缓冲存储器。
220.在一些实施例中,处理器201可以包括一个或多个接口。接口可以包括集成电路 (inter-integrated circuit,i2c)接口,集成电路内置音频(inter-integrated circuitsound,i2s)接口,脉冲编码调制(pulse code modulation,pcm)接口,通用异步收发传输器(universal asynchronous receiver/transmitter,uart)接口,移动产业处理器接口(mobile industry processor interface,mipi),通用输入输出(general-purposeinput/output,gpio)接口,和/或通用串行总线(universal serial bus,usb)接口等。其中,usb接口211是符合usb标准规范的接口,可以用于连接充电器为自动驾驶车辆充电。
221.其中,本公开实施例的数据处理方法的执行主体可以是如图9中所示的处理器201,也可以是如图9中所示的车载盒子210。
222.根据本公开实施例的另一个方面,本公开实施例还提供了一种数据处理装置。
223.请参阅图10,图10为本公开实施例的数据处理装置的框图。
224.如图10所示,所述数据处理装置包括:
225.第二接收模块21,用于接收车端设备发起的用于接入路侧单元,和/或用于获取静态路边设备的信号发射功率相关信息的第一消息;
226.第二处理模块22,用于根据所述第一消息和预存的高精地图确定第二消息,其中,所述第二消息包括所述车端设备接入所述路侧单元的相关信息,和/或所述静态路边设备的信号发射功率相关信息;
227.第二发送模块23,用于将所述第二消息发送至所述车端设备,以便所述车端设备根据根据所述第二消息接入至所述路侧单元,或者根据所述第二消息确定所述车端设备的信号发射功率。
228.在一些实施例中,若所述第二消息包括所述静态路边设备的信号发射功率相关信息,则所述静态路边设备的信号发射功率相关信息包括用于对所述车端设备的信号发射功率进行调整的调整指令。
229.在一些实施例中,若所述第一消息包括所述车端设备的位置信息,则所述第二处理模块22用于,从所述高精地图中提取与所述车端设备的位置信息对应的静态路边设备的属性信息,并根据所述静态路边设备的属性信息生成包括所述调整指令的所述第二消息。
230.在一些实施例中,所述静态路边设备的属性信息包括信号覆盖范围与信号发射功率之间的对应关系,所述第二处理模块22用于,响应于所述位置信息位于所述对应关系中的信号覆盖范围,从所述对应关系中确定与所述信号覆盖范围对应的信号发射功率,并根据所述与所述信号覆盖范围对应的信号发射功率生成所述调整指令。
231.结合图10可知,在一些实施例中,所述装置还包括:
232.获取模块24,用于获取路边设施的位置信息,并获取所述路边设施的属性信息,其中,所述路边设施包括所述路侧单元和/或所述静态路边设备,所述路边设施的属性信息包括所述路侧单元的属性信息和/或所述静态路边设备的属性信息;
233.构建模块25,用于根据所述路边设施的位置信息、所述路边设施的属性信息和预设的矢量地图构建所述高精地图。
234.在一些实施例中,所述构建模块25还用于,根据所述路边设施的位置信息将所述路边设施以节点的形式添加至所述矢量地图中,并将所述路边设施的属性信息作为所述节点的属性字段进行存储,生成所述高精地图。
235.在一些实施例中,所述路侧单元的属性信息包括接入所述路侧单元的相关信息,所述静态路边设备的属性信息包括信号覆盖范围与发射功率之间的对应关系。
236.在一些实施例中,所述获取模块用于,采集道路对应的点云信息和/或视频信息,从所述点云信息和/或视频信息中提取所述位置信息;或者,
237.基于测绘设备获取所述位置信息。
238.根据本公开实施例的另一个方面,本公开实施例还提供了一种云端服务器,云端服务器包括如上任一实施例所述的装置。
239.根据本公开实施例的另一个方面,本公开实施例还提供了一种交互系统,所述交互系统包括如上实施例所述的自动驾驶车辆和如上实施例所述的云端服务器。
240.根据本公开实施例的另一个方面,本公开实施例还提供了一种电子设备和计算机存储介质。
241.请参阅图11,图11为本公开实施例的电子设备的框图。
242.其中,电子设备旨在表示各种形式的数字计算机,诸如,膝上型计算机、台式计算机、工作台、服务器、刀片式服务器、大型计算机、和其它适合的计算机。本文所示的部件、它们的连接和关系、以及它们的功能仅仅作为示例,并且不意在限制本文中描述的和/或者要求的本公开的实现。
243.例如,电子设备可以为自动驾驶车辆上设置的车载盒子(telematics box,t-box),域控制器(domian controller,dc),多域控制器(multi-domian controller,mdc),车载单元(on board unit,obu),车联网芯片等。
244.具体地,电子设备包括至少一个处理器101,通信总线102,存储器103以及至少一个通信接口104。电子设备可以是一个通用计算机或服务器或者是一个专用计算机或服务器。
245.处理器101可以是一个通用中央处理器(central process ing unit,cpu),微处理器,特定应用集成电路(application-specific integrated circuit,asic),或一个或多个用于控制本发明方案程序执行的集成电路。
246.通信总线102可包括一通路,在上述组件之间传送信息。
247.通信接口104,可以是任何收发器或ip端口或总线接口等,用于与内部或外部设备或装置或通信网络通信,如以太网,无线接入网(radio access network,ran),无线局域网(wireless local area networks,wlan)等。如电子设备为集成在车辆内部的功能单元时,通信接口104包括如下接口中的一种或多种,如车辆外部网络进行通信的收发器,车辆其它内部单元通信的总线接口(如控制器局域网络(controller area network, can)总线接口)等。
248.存储器103可以是只读存储器(read-only memory,rom)或可存储静态信息和指令的其他类型的静态存储设备,随机存取存储器(random access memory,ram)或者可存储信息和指令的其他类型的动态存储设备,也可以是电可擦可编程只读存储器 (electrically erasable programmable read-only memory,eeprom)、只读光盘(compactdisc read-only memory,cd-rom)或其他光盘存储、光碟存储(包括压缩光碟、激光碟、光碟、数字通用光碟、蓝光光碟等)、磁盘存储介质或者其他磁存储设备、或者能够用于携带或存储具有指令或数据结构形式的期望的程序代码并能够由计算机存取的任何其他介质,但不限于此。存储器可以是独立存在,通过总线与处理器相连接。存储器也可以和处理器集成在一起。
249.其中,存储器103即为本公开所提供的非瞬时计算机可读存储介质,所述存储器存储有可由至少一个处理器执行的指令,以使所述至少一个处理器执行本公开所提供的数据处理方法。本公开的非瞬时计算机可读存储介质存储计算机指令,该计算机指令用于使计算机执行本公开所提供的数据处理方法。
250.存储器103作为一种非瞬时计算机可读存储介质,可用于存储非瞬时软件程序、非瞬时计算机可执行程序以及模块。处理器101通过运行存储在存储器103中的非瞬时软件程
序、指令以及模块,从而执行服务器的各种功能应用以及数据处理,即实现上述方法实施例中的数据处理方法。
251.存储器103可以包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、至少一个功能所需要的应用程序;存储数据区可存储根据电子设备的使用所创建的数据等。此外,存储器103可以包括高速随机存取存储器,还可以包括非瞬时存储器,例如至少一个磁盘存储器件、闪存器件、或其他非瞬时固态存储器件。在一些实施例中,存储器103可选包括相对于处理器101远程设置的存储器,这些远程存储器可以通过网络连接至电子设备。上述网络的实例包括但不限于互联网、车联网、企业内部网、局域网、移动通信网及其组合。
252.在具体实现中,作为一种实施例,处理器101可以包括一个或多个cpu,例如图11 中的cpu0和cpu1。
253.在具体实现中,作为一种实施例,电子设备可以包括多个处理器,例如图11中的处理器101和处理器108。这些处理器中的每一个可以是一个单核(single-cpu)处理器,也可以是一个多核(multi-cpu)处理器。这里的处理器可以指一个或多个设备、电路、和/或用于处理数据(例如计算机程序指令)的处理核。
254.在具体实现中,作为一种实施例,电子设备还可以包括输出装置105和输入装置106。输出装置105和处理器101通信,可以以多种方式来显示信息。例如,输出装置105可以是液晶显示器(l iquid crystal display,lcd),发光二极管(l ight emitt ing diode, led)显示装置,阴极射线管(cathode ray tube,crt)显示装置,或投影仪(projector) 等。输入装置106和处理器101通信,可以以多种方式接受用户的输入。例如,输入装置106可以是鼠标、键盘、触摸屏装置或传感装置等。
255.当图11所示的电子设备为芯片时,通信接口104的功能/实现过程还可以通过管脚或电路等来实现,所述存储器为所述芯片内的存储单元,如寄存器、缓存等,所述存储单元还可以是位于所述芯片外部的存储单元。
256.应该理解,可以使用上面所示的各种形式的流程,重新排序、增加或删除步骤。例如,本公开中记载的各步骤可以并行地执行也可以顺序地执行也可以不同的次序执行,只要能够实现本公开的技术方案所期望的结果,本文在此不进行限制。
257.上述具体实施方式,并不构成对本公开保护范围的限制。本领域技术人员应该明白的是,根据设计要求和其他因素,可以进行各种修改、组合、子组合和替代。任何在本公开的精神和原则之内所作的修改、等同替换和改进等,均应包含在本公开保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。