技术特征:
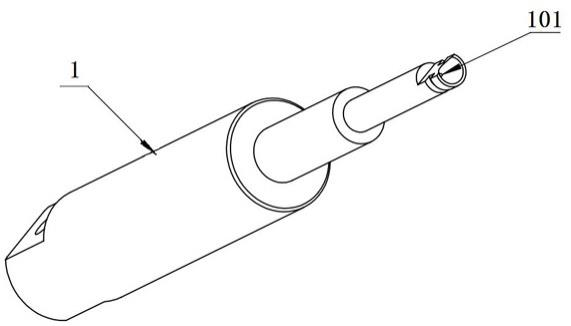
1.一种手机钻头标定装置,其特征在于,包括标定装置、相机、手机头、手机固定装置、钻头、末端阵列、标定探针;其中,所述标定装置的顶部可插入到所述手机头中并固定;所述手机固定装置用于将所述手机钻头标定装置固定在机械臂上;所述相机通过探测所述末端阵列可以计算所述相机与所述末端阵列之间的空间位置关系;所述标定探针上端具有阵列特征,所述相机通过探测该阵列可以计算所述相机与所述标定探针上的阵列之间的空间位置关系;所述标定装置和所述钻头的长度已知。2.根据权利要求1所述的一种手机钻头标定装置,其特征在于,所述标定装置的顶部结构为种植手机钻头标准接口结构,所述标定装置的顶部可以通过标准接口插入到所述手机头中,并利用所述手机头内部的卡槽固定。3.根据权利要求1所述的一种手机钻头标定装置,其特征在于,所述标定装置顶部、底部和底部侧面设置有锥形凹槽特征,且锥形凹槽深度已知。4.根据权利要求1所述的一种手机钻头标定装置,其特征在于,所述标定装置顶部凹槽的底面点和底部凹槽的底面点之间的连线为所述标定装置的中心轴线。5.根据权利要求4所述的一种手机钻头标定装置,其特征在于,所述标定装置底部侧面的锥形凹槽的底面点到中心轴线的距离已知。6.根据权利要求1所述的一种手机钻头标定装置,其特征在于,所述标定探针的底端具有针头特征,顶端具有阵列特征,且所述针头与所述阵列的相对位置关系已知。7.根据权利要求1所述的一种手机钻头标定装置,其特征在于,所述手机头通过结构件与所述末端阵列装配在一起。8.一种手机钻头标定方法,其特征在于,包括:用所述标定探针的针尖,点在所述标定装置顶部的锥形凹槽底面点,确定所述钻头尖端在空间内的具体位置;用所述标定探针的针尖,点在所述标定装置底部的锥形凹槽底面点,确定所述钻头偏转的角度;用所述标定探针的针尖,点在所述标定装置底部侧边的锥形凹槽底面点,验证标定是否成功。9.根据权利要求8所述的一种手机钻头标定方法,其特征在于,所述用所述标定探针的针尖,点在所述标定装置顶部的锥形凹槽底面点,确定所述钻头尖端在空间内的具体位置,包括:用所述标定探针的针尖,点在所述标定装置顶部的锥形凹槽底面点;所述相机通过探测所述标定探针上的阵列计算所述相机与所述标定探针上的阵列之间的空间位置关系;计算所述标定探针针头的空间位置,即所述标定装置顶部的锥形凹槽的底面点在所述相机视场角内的空间位置;所述相机通过探测所述末端阵列,计算所述末端阵列在所述相机视场角内的空间位置;
计算所述末端阵列与所述标定装置顶部锥形凹槽的底面点的相对空间位置;所述钻头没有凹槽,为平面,可以得知所述钻头代替所述标定装置装配到所述手机头后,其顶面中心点为目前探测到的所述标定装置顶部的锥形凹槽的底面点在所述标定装置的中心轴线上相应地抬高锥形凹槽深度;已知所述钻头的长度,可以计算出使用所述钻头时,所述钻头尖端在所述相机视场角内的空间位置,即通过标定确定了所述钻头尖端在空间内的具体位置。10.根据权利要求8所述的一种手机钻头标定方法,其特征在于,所述用所述标定探针的针尖,点在所述标定装置底部的锥形凹槽底面点,确定所述钻头偏转的角度,包括:用所述标定探针的针尖,点在所述标定装置底部的锥形凹槽底面点;所述相机通过探测所述标定探针上的阵列计算所述相机与所述标定探针上的阵列之间的空间位置关系;计算所述标定探针针头的空间位置,即所述标定装置底部的锥形凹槽的底面点在所述相机视场角内的空间位置;通过所述标定装置顶部凹槽的底面点和底部凹槽的底面点的位置可计算出所述标定装置的中心轴线的空间位置;所述钻头装配到所述手机头后的中心轴线与所述标定装置的中心轴线重合,通过此标定,可以计算后续进行种植牙时,所述钻头的偏转角度。11.根据权利要求8所述的一种手机钻头标定方法,其特征在于,所述用所述标定探针的针尖,点在所述标定装置底部侧边的锥形凹槽底面点,验证标定是否成功,包括:用所述标定探针的针尖,点在所述标定装置底部侧边的锥形凹槽底面点,进行所述标定装置中心轴线的二次确认;由于所述标定装置底部侧边的锥形凹槽底面点到中心轴线的距离设计上已知,所述相机通过计算并确认实际测出来的所述标定装置中心轴线与所述标定装置底部侧边的锥形凹槽中心底部的距离是否在容许误差范围内,若在范围内,则标定成功;否则,则标定失败,需重新标定。
技术总结
本发明涉及医疗技术领域,具体涉及一种手机钻头标定装置及方法,该装置包括标定装置、相机、手机头、手机固定装置、钻头、末端阵列、标定探针。本发明通过所述标定装置的顶部凹槽,结合所述相机和所述标定探针,确定顶部凹槽中心底部点的空间位置,将其与所述末端阵列位置关联起来,通过凹槽深度换算成种植钻头工作尖端的空间位置,从而将种植钻头尖端的空间位置与所述末端阵列关联起来,消除所述手机头与所述末端阵列固定中间结构件的加工误差、组装误差。另外,本发明通过所述标定装置、所述相机和所述标定探针,可以实际探测出所述钻头装配后的轴线空间位置,从而计算后续机械臂带动整体手机头和末端运动时种植钻头的偏转角度。手机头和末端运动时种植钻头的偏转角度。手机头和末端运动时种植钻头的偏转角度。
技术研发人员:陈盛
受保护的技术使用者:杭州键嘉机器人有限公司
技术研发日:2022.04.27
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。